 RX72M單芯片EtherCAT伺服方案之操作說明與規范
RX72M單芯片EtherCAT伺服方案之操作說明與規范
3. 操作說明
3.1 TwinCAT控制電機
本文檔使用的EtherCAT工具是:TwinCAT 3。假設用戶已經成功安裝了TwinCAT 3,這里不再贅述TwinCAT的安裝過程。
復制EtherCAT_ESI文件夾下面的文件RX72M EtherCAT MotorSolution.xml到TwinCAT 3的安裝目錄——C:TwinCAT3.1ConfigIoEtherCAT (默認安裝路徑)。
使用網線連接控制板的 網口J15 (ECAT_IN)和電腦端的網口。
在開始菜單里選擇:
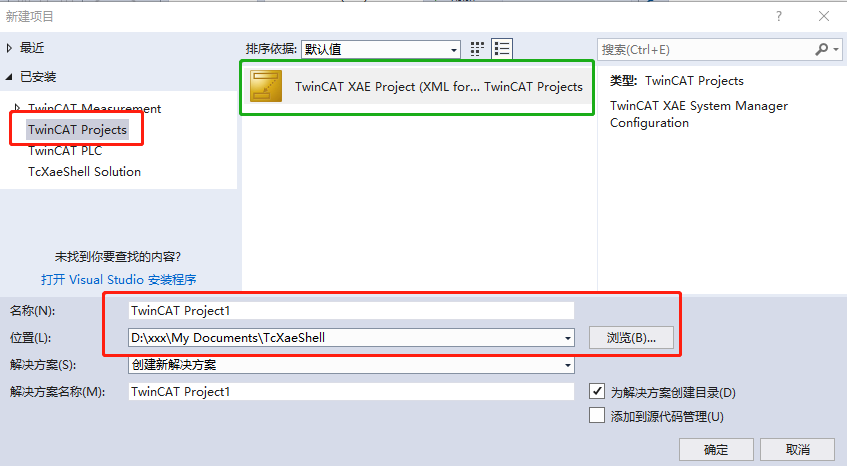
[Beckhoff]→[TwinCAT3]→[TwinCAT XAE Shell],啟動TwinCAT3。在TwinCAT3的界面選擇:[文件]→[新建]→[項目],彈出如下對話框,然后在左邊選擇[TwinCAT Project],并在下面的紅框處選擇項目的路徑位置和項目名稱。
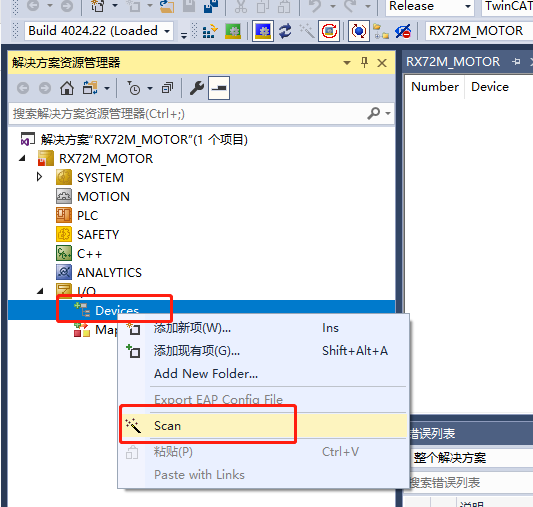
在解決方案資源管理器窗口,選擇[I/O],展開并選中[Device],在右鍵菜單選擇[Scan]。如下圖。
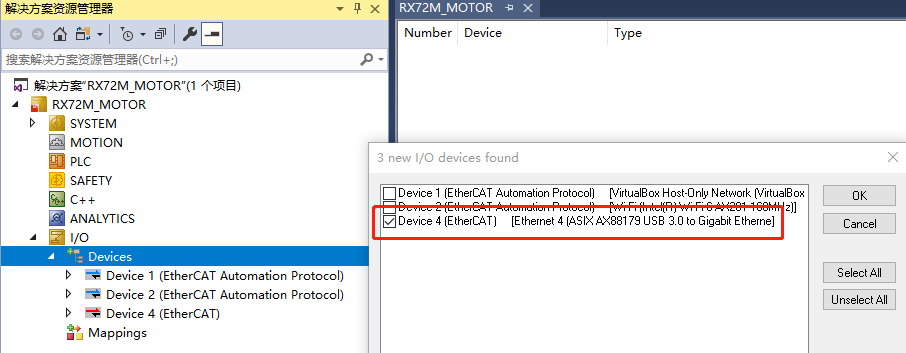
? 在彈出的小窗口點擊確認后,開始掃描網絡端口,并彈出如下圖的網絡列表。連接了網線的本地網口設備會顯示在列表中,并且如圖的紅框所示,前面有“√”選中。
? 如果連接的網線的網卡前面沒有“√”出現,則代表TwinCAT沒有掃描到網絡上連接的EtherCAT從站設備。
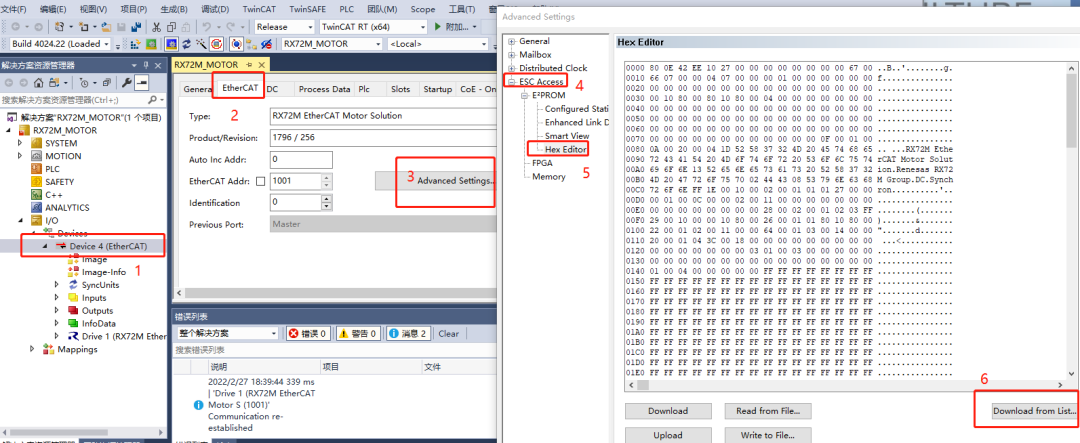
如右圖所示,是掃描后的結果,綠色框是掃描到的項目,如果下面的綠色框顯示[Box1 (PFFFFFFFF RFFFFFFFF)],則表示該從站設備的EEPROM里沒有寫入ESI描述信息。
按照下圖的順序操作,可以寫EEPROM。
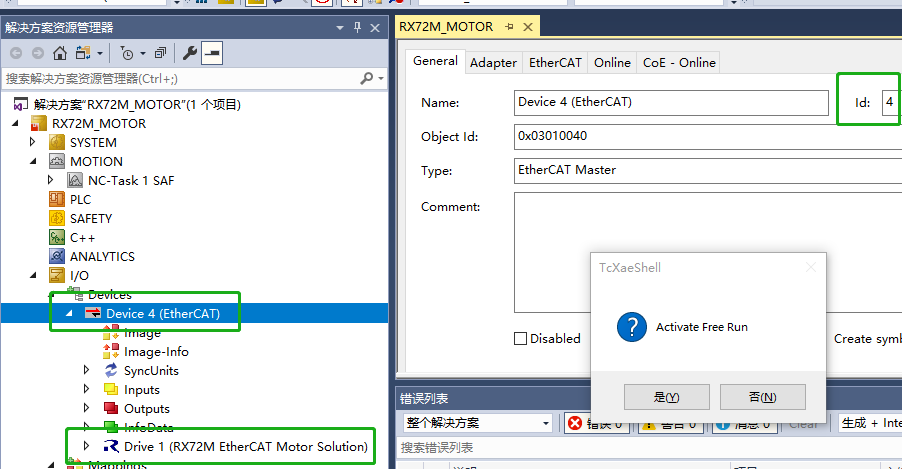
在上一頁掃描到設備的窗口點擊[是]后,從站設備應該自動進入[OP]模式,TwinCAT跟從站設備之間的網絡通信已建立。
? 按照下圖的綠色框信息,確認從站是否處于正確的工作狀態。不能進入Current State: OP,則是網絡工作不正常,可能由網絡質量差導致的。
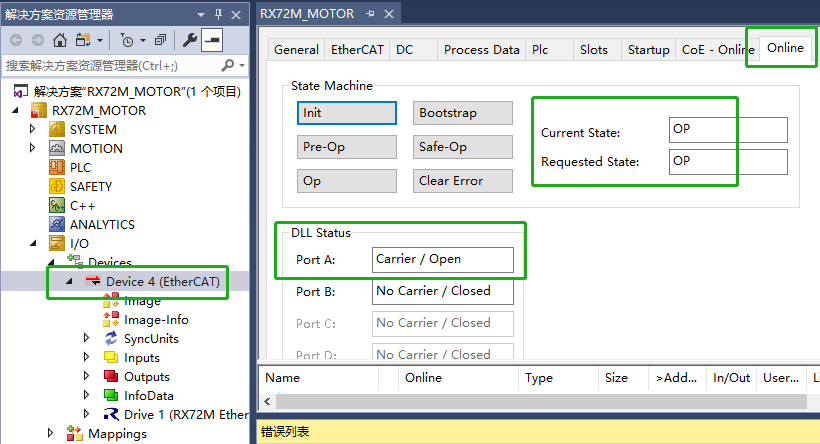
? 如果DLL Status窗口,比如Port A狀態:是Open / Closed輪流跳變,則表示PHY的配置不正確引起PHY_LINK信號不穩定(如果插好網線,PHY_LINK是固定電平)
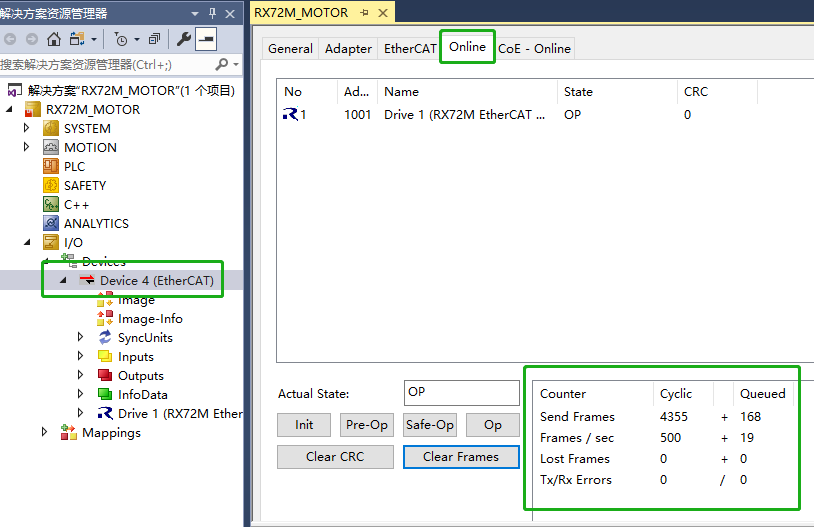
? 如下窗口:可以檢查網絡質量,如果Lost Frames和Tx/Rx Errors項目不是0,也會導致從站不能進入OP狀態。
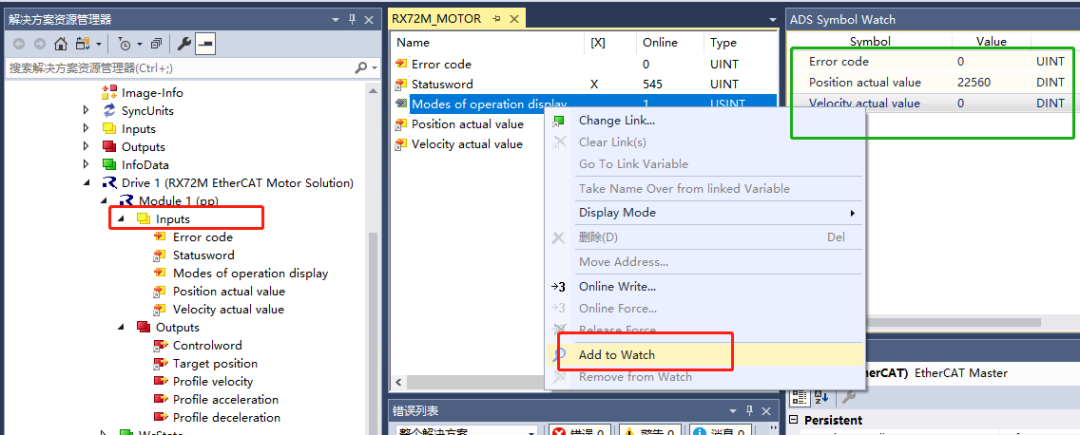
如下圖,左邊Module 1展開,是在pp(position profile)模式下的輸入/輸出的數據,這里的方向是相對主站來說的。按照下圖的操作,在輸入參數的右鍵菜單里選擇[Add to Watch],可以把輸入參數顯示到右邊的ADS Symbol Watch窗口,這樣在后面修改Outputs參數控制電機的時候,方便觀察Inputs 數據變化。
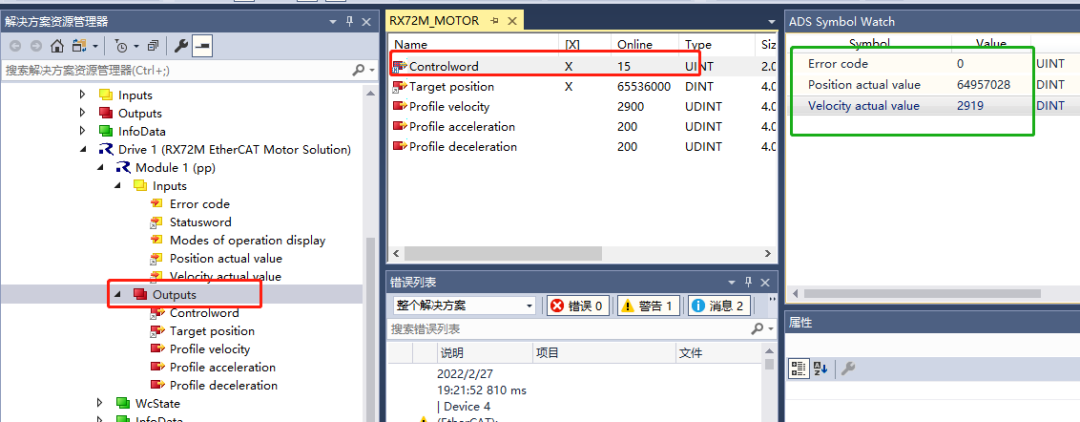
按照下圖的顯示,先修改Outputs數據的項目:Target position / Profile velocity / Profile acceleration / Profile deceleration。
? 然后依次修改[Controlword]: 0→7 →15,電機就可以轉起來了,右邊窗口可以觀察速度和當前的位置信息,可以看到電機加速?勻速?減速的過程,當位置信息[Position actual value]變成跟[Target Position]一致后,電機就停止轉動了,此時,電機軸是鎖緊狀態,用手是擰不動的,電機的電流和力矩會隨著手上擰的力越大,變得越來越大。所以此時電機還是處于工作狀態。這時需要把[Controlword]寫入0,電機才停止工作。
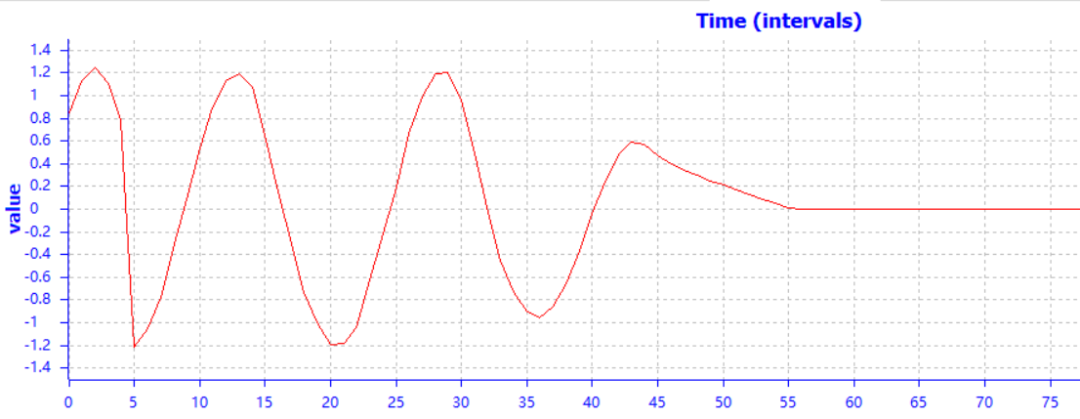
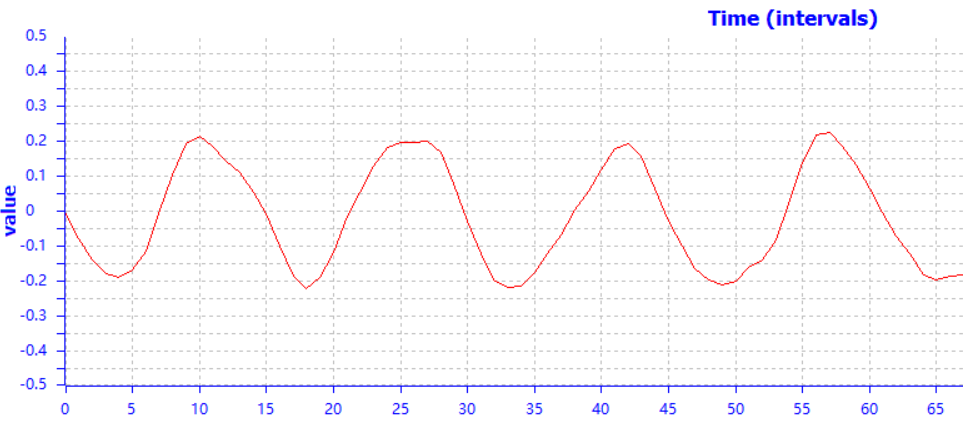
3.2 電機運轉時電流測試
空載60rpm轉速啟動時的V相電流:啟動電流約1.2A
空載60rpm,勻速運轉時的V相電流:約0.1A
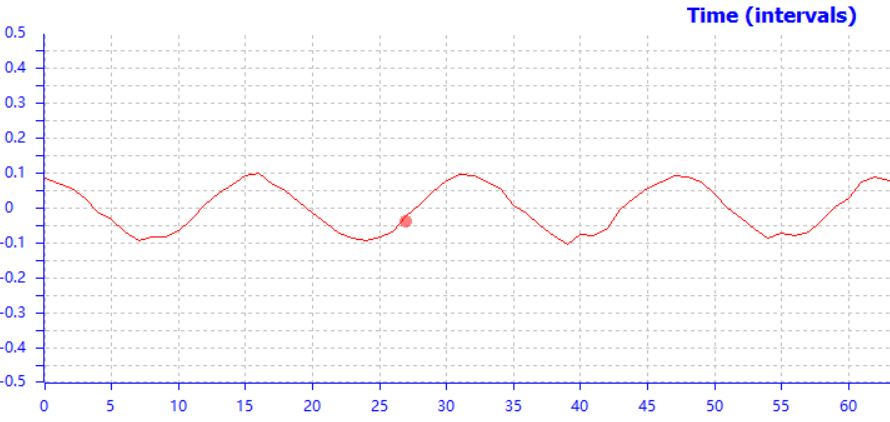
60rpm,加了輕載,勻速運轉時的V相電流:約0.2A
4. 規范
下列表格中列出了評估板的電氣規范和其他規范。
4.1 電氣規范
表1 輸入電源規范

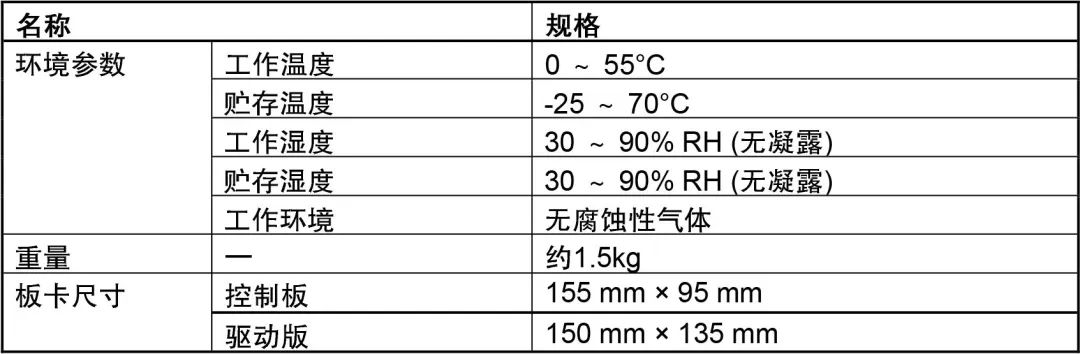
4.2 環境參數
表2 環境規范
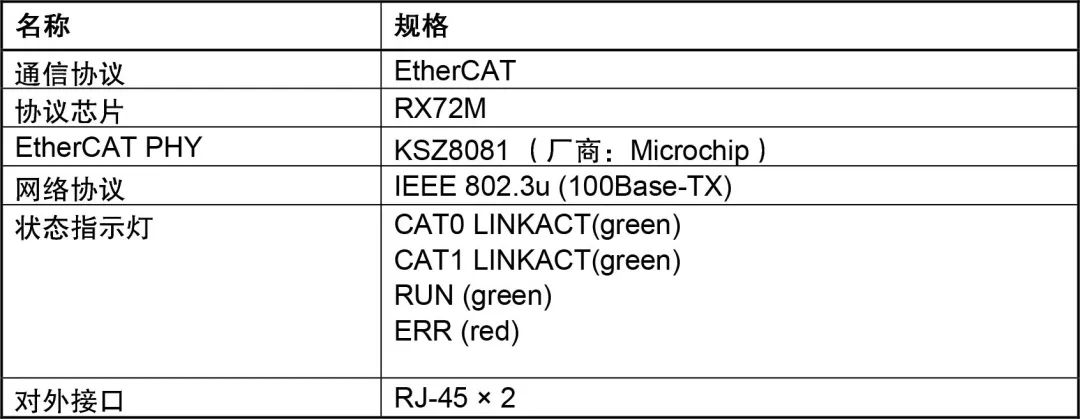
4.3 規范
表3 通信規范
審核編輯:劉清
-
EEPROM
+關注
關注
9文章
1033瀏覽量
81842 -
PHY
+關注
關注
2文章
305瀏覽量
51826 -
控制電機
+關注
關注
0文章
241瀏覽量
18198 -
EtherCAT總線
+關注
關注
5文章
72瀏覽量
5442
原文標題:RX72M單芯片EtherCAT伺服方案(下)操作說明與規范
文章出處:【微信號:瑞薩MCU小百科,微信公眾號:瑞薩MCU小百科】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于SSC tool和瑞薩RX72M快速開發EtherCAT從站設備

瑞薩電子推出RX72M工業網絡解決方案,加速工業從站設備開發
RX72M單芯片EtherCAT伺服方案(上)概述與功能介紹
RX72M單芯片EtherCAT伺服方案(下)操作說明與規范
[e2studio] Renesas Starter Kit+ for RX72M 教程手冊
![[e2studio] Renesas Starter Kit+ for <b class='flag-5'>RX72M</b> 教程手冊](https://file.elecfans.com/web1/M00/D9/4E/pIYBAF_1ac2Ac0EEAABDkS1IP1s689.png)
[CS+] Renesas Starter Kit+ for RX72M Smart Configurator 教程手冊
RX72M和PHY芯片連接時的注意事項

在TwinCAT中配置RX72M使能DC Mode

基于RX72M微控制器的EtherCAT數據抓包方法分析
基于RX72M的EtherCAT直流無刷電機方案





 工商網監
工商網監
評論