") 擁有人類觸覺的柔軟機械手
擁有人類觸覺的柔軟機械手
這篇文章來源于DevicePlus.com英語網(wǎng)站的翻譯稿。
具有人類觸覺的柔軟機械手開啟了假肢研究的新領(lǐng)域。手是人類身體接觸所有事物的重要部分,不僅具有觸摸、抓取和抓握的功能,而且指尖還擁有非常敏感且與身體其他部分相連的感覺神經(jīng)。
康奈爾大學(xué)的一個由機械和航空航天工程助理教授、有機機器人實驗室(ORL)首席研究員Robert Shepherd帶領(lǐng)的研究團隊研制了一種搭載光敏應(yīng)變傳感器的假手,能夠?qū)崿F(xiàn)人手的類似功能。該機械手可以移動每根手指、觸摸物品并擁有內(nèi)部感覺。
通常,我們認為機器人都是由金屬制成的剛性結(jié)構(gòu),其傳感器通常位于機身外部。然而,這只特殊的機械手是柔性的,而且具有觸覺。Zhao表示,“我們將傳感器集成在了機械手內(nèi)部,因此,這些傳感器實際上可以通過機器人的厚度來檢測傳遞的力量,就像我們和所有生物體感受疼痛的機理一樣”。
目標和設(shè)計
該項目旨在證明光學(xué)傳感器可以集成到柔性執(zhí)行器中,并提供高品質(zhì)的感官能力。這些彈性光波導(dǎo)高度可拉伸、化學(xué)穩(wěn)定、易于制造并擁有高精度的信號輸出。
該假手安裝在一個3D打印的剛性手掌上,由四根致動軟指(ΔP= 100kPa)和一根拇指組成。研發(fā)團隊選用3D打印和軟光刻的原因如下:這些技術(shù)擁有較高的設(shè)計自由度、重塑軟質(zhì)材料形狀的成熟能力以及高精度。
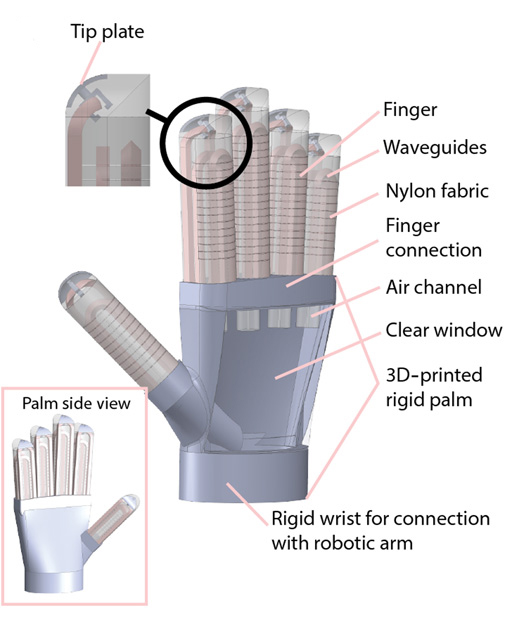
圖 1. 柔性機械手結(jié)構(gòu)和組件 / ?Zhao等人,2016
指尖由外徑18 mm的中空硅膠管制成。四根手指通過氣動系統(tǒng)控制。壓縮空氣通過中空管進入之后,充氣壓力驅(qū)動手指執(zhí)行各種手的動作。假手的每根手指都設(shè)計為柔性,以利用其內(nèi)在的順應(yīng)性,因此他們可以通過開環(huán)控制實現(xiàn)大部分實驗。軟執(zhí)行器可以將外力傳至內(nèi)部結(jié)構(gòu)和嵌入式傳感器。指尖還集成了與波導(dǎo)相連、直接將外部力傳遞到波導(dǎo)的指尖感光板,以提高觸覺靈敏度。
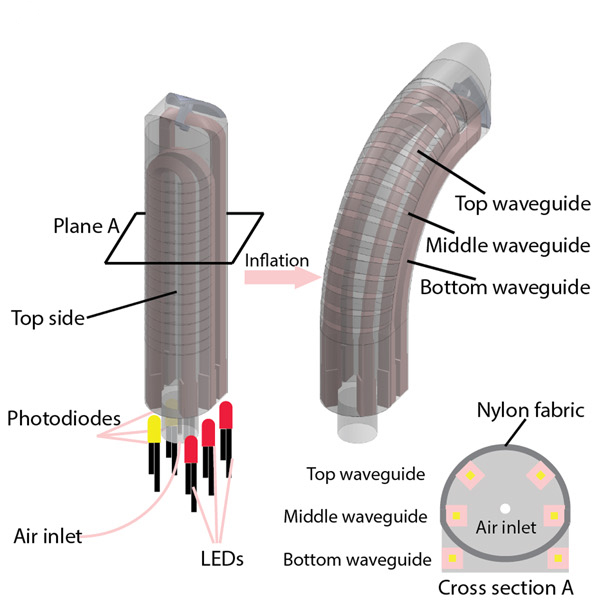
圖 2. 柔性手指結(jié)構(gòu)和組件 / ?Zhao等人,2016
每根手指都由具有細縫的尼龍織物制成,以實現(xiàn)周向拉伸,進行致動。致動器中嵌入了光敏應(yīng)變傳感器,而且每根手指中嵌入三個波導(dǎo)(U形波導(dǎo);頂部、中部和底部)。嵌在手指中的傳感器通過光學(xué)器件傳遞壓力、紋理和位置信息。
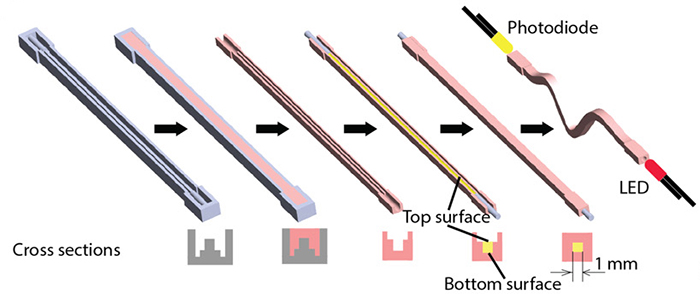
圖 3. 波導(dǎo)制造過程 / ?Zhao等人,2016
引導(dǎo)電磁波的彈性波導(dǎo)為中空管,使用透明聚氨酯橡膠制成。光通過波導(dǎo)管傳播時會產(chǎn)生損耗,如果波導(dǎo)管發(fā)生變形,光損失量還會增加。管中的光損失量通過一個光電檢測器測量。機械手利用這些光信號收集觸摸物體的數(shù)據(jù),因為波導(dǎo)在觸摸過程中會發(fā)生彎曲、變形或改變光信號。可拉伸波導(dǎo)通過軟光刻工藝制造,每個波導(dǎo)含有一個LED和光電二極管。
以下視頻演示了三個波導(dǎo)的功能(在一個手指中):
以下視頻演示了三個波導(dǎo)的功能(在一個手指中):
手指充氣和拉直時,中間和頂部波導(dǎo)響應(yīng);
手指放氣時,中間波導(dǎo)響應(yīng)。
實驗
根據(jù)人手的常用功能,研發(fā)團隊進行了三項測試:形狀和紋理檢測、柔軟度檢測以及物體識別。
1.形狀和紋理檢測
人手感覺一個表面的粗糙度和形狀的最常用探索過程就是橫向掃描。研發(fā)團隊利用自己的機器人手臂引導(dǎo)機械手在固定高度對多個表面進行橫向掃描,以區(qū)分其形狀和紋理。他們通過該方法測試了手指映射七種不同3D打印表面的能力。實驗結(jié)果表明,該機械手能夠區(qū)分5m-1的彎曲度以及100μm級別的粗糙度。
2.柔軟度檢測
在本次柔軟度檢測試驗中,機械手測試了以下五種材質(zhì)和物體的柔軟度:丙烯酸塑料、聚氨酯海綿、硅橡膠、成熟番茄、未成熟番茄。致動器的尖端必須直接接觸物體頂部,以讀取指尖的受力大小和彎曲程度以及不斷變化的內(nèi)部壓力,這兩部分數(shù)據(jù)分別由底部波導(dǎo)功率損耗和頂部波導(dǎo)功率損耗表示。
根據(jù)內(nèi)部壓力改變手指的剛度也有助于為每種材料生成應(yīng)力-應(yīng)變曲線。“底部波導(dǎo)中的損耗與物體的接觸力(應(yīng)力)成正比,而頂部波導(dǎo)中的損耗與其變形(應(yīng)變)成正比。”研發(fā)團隊測量了每個物體的四個狀態(tài),并且能夠?qū)⑵鋽M合成線性曲線,從而進行比較。
3.物體識別
物體識別的實驗方法如下:研發(fā)團隊要求機械手從三個番茄中挑出最成熟的一個。在這個演示中,研究人員結(jié)合了形狀和柔軟度測量。首先,他們用橫向掃描、形狀重建的方法來確定番茄的形狀和位置。然后,機械手用食指確定西紅柿的輸出信號,從而測量其柔軟度。最成熟的番茄的頂部波導(dǎo)損耗最大且底部波導(dǎo)損耗最小。就像我們在超級市場一樣,該機械手輕輕按壓每個西紅柿,最終找到最軟的一個。
討論
這種具有豐富感覺的柔軟假手是材料科學(xué)和機器人技術(shù)中以下幾個領(lǐng)域結(jié)合和延伸的成果:3D打印、軟光刻和柔性機器人。這些創(chuàng)新使得機械手實現(xiàn)了極高的精確度和極佳的拉伸性。該團隊還強調(diào)了假手的易于制造性和化學(xué)相容性。此外,機器人領(lǐng)域?qū)⑹芤嬗诳衫觳▽?dǎo)傳感器的高再現(xiàn)性。
該原型還有很多方面需要改進。研究人員表示,通過在致動器中集成更多的傳感器或者更換致動器本體,可以提高本體感受和外部感受性的感覺密度。如果使用較大功率的LED、大功率激光二極管以及增加軟致動器的壓力范圍(即更大壓力),機械手的觸覺靈敏度還可以增強。

Yulhane-Jerez Koh
Yulhane畢業(yè)于加州大學(xué)伯克利分校(UC Berkeley),是一名生物力學(xué)工程師,同時也是美國deviceplus公司的執(zhí)行編輯。Yulhane的主要興趣在于群體機器人、機器學(xué)習(xí)和神經(jīng)科學(xué)領(lǐng)域。
審核編輯黃宇
-
傳感器
+關(guān)注
關(guān)注
2552文章
51382瀏覽量
755912 -
機器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
208050 -
機械手
+關(guān)注
關(guān)注
7文章
339瀏覽量
29719
發(fā)布評論請先 登錄
相關(guān)推薦
案例分析,搬運機械手如何選擇電機?

LabVIEW運動控制(一):EtherCAT運動控制器的SCARA機械手應(yīng)用

機器視覺運動控制一體機在DELTA并聯(lián)機械手視覺上下料應(yīng)用

AI視角下的ZR機械手市場:速程精密科技獨占鰲頭
機械手 OEM 的應(yīng)用
明治案例 | 【BGS背景抑制】【大光斑】機械手吸取網(wǎng)布有無檢測

“快、準、穩(wěn)”——阿普奇AK5在機械手領(lǐng)域的應(yīng)用解決方案

機器視覺控制機械手的具體過程

PLC在機械手控制系統(tǒng)中的具體應(yīng)用
EtherCAT運動控制器Delta機械手應(yīng)用

工業(yè)網(wǎng)關(guān)的數(shù)字化車間機械手和工業(yè)生產(chǎn)設(shè)備遠程監(jiān)控解決方案應(yīng)用

ZR機械手:提高生產(chǎn)效率,降低成本的有效途徑-速程精密

ZR機械手:推動制造業(yè)向更高水平發(fā)展

搬運機械手連接“搭子”哪家選?YM系列工業(yè)級連接器真搭






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論