") Disney Snapbot力學(xué)講解
Disney Snapbot力學(xué)講解
這篇文章來(lái)源于DevicePlus.com英語(yǔ)網(wǎng)站的翻譯稿。Snapbot是迪士尼研發(fā)團(tuán)隊(duì)發(fā)布的最新機(jī)器人開(kāi)發(fā)項(xiàng)目。本款機(jī)器人帶有主體和六條可拆卸支腿,呈蜘蛛外形,采用模塊化設(shè)計(jì),并且能以多種不同方式重新配置,從而可用于不同的移動(dòng)模式。
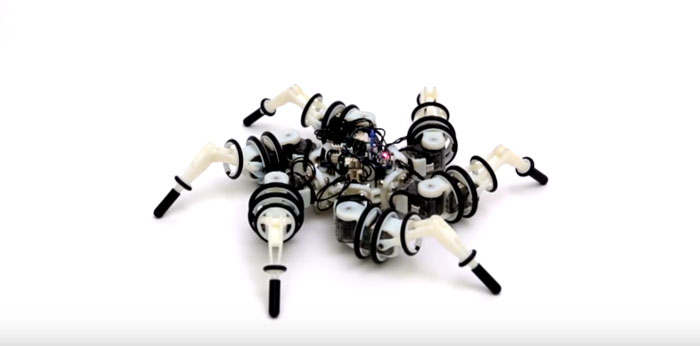
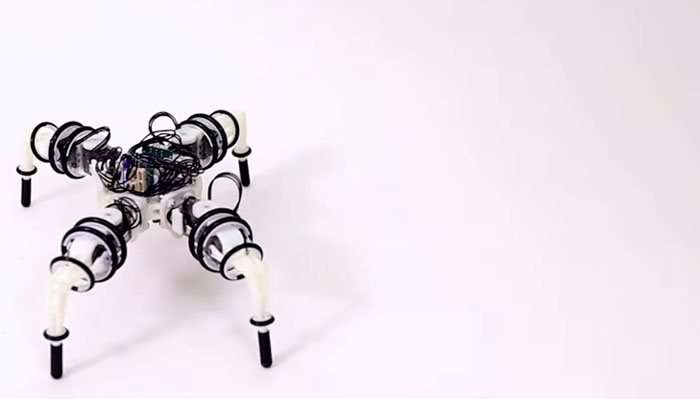
Snapbot在行動(dòng)
什么使Snapbot與眾不同
Snapbot的研發(fā)重點(diǎn)是能夠在保證機(jī)動(dòng)性的同時(shí)進(jìn)行重新配置。無(wú)論是否只連接了一條腿,或者是否連接了全部六條腿,機(jī)器人仍然能夠行進(jìn)。
雖然以前有很多團(tuán)隊(duì)都致力于研發(fā)有腿機(jī)器人(單足機(jī)器人、雙足機(jī)器人、四足機(jī)器人、六足機(jī)器人等)的可變配置,但這些機(jī)器人中的大多數(shù)都進(jìn)行了基于模型的設(shè)置。因此,您可以將機(jī)器人設(shè)置為三條腿,連接三條腿后觀察機(jī)器人的行為。
借助Snapbot,采用嵌入式算法可“讀取”機(jī)器人的配置并相應(yīng)地調(diào)整其運(yùn)動(dòng)模式。這意味著在“受傷”以后,例如失去一條腿,它可以調(diào)整其行為。
Snapbot的組成部分
Snapbot的硬件包括3D打印機(jī)身和六條腿。
主體是機(jī)器人的中心樞紐。機(jī)器人外形類(lèi)似于六邊形,六條邊為六條腿提供接口,底部有六個(gè)三角形支腿,可最大限度地減少機(jī)器人與地面的摩擦。
這款機(jī)器人配備了7.2V鋰離子電池,可為機(jī)器提供無(wú)線(xiàn)電源。還配置了一個(gè)OpenCM9.04微控制器,可為機(jī)器提供數(shù)據(jù)處理能力。微控制器通過(guò)四顆鉚釘連接到機(jī)身框架,來(lái)自微控制器的數(shù)據(jù)被輸入兩個(gè)集線(xiàn)器中,然后每個(gè)集線(xiàn)器將數(shù)據(jù)傳輸?shù)阶罱娜龡l腿中。
機(jī)身總寬度僅為3英寸,其重量(包括電池和電子設(shè)備)約為0.4磅。
每個(gè)模塊化支腿以徑向形式連接到主體,與Anthrobot不同,這款機(jī)器人配置了六條腿,在主體兩側(cè)各三條腿。
Snapbot最多可以連接六條腿,但設(shè)計(jì)有三種支腿用于提供三種不同類(lèi)型的運(yùn)動(dòng)。三種腿為:滾動(dòng)間距型、偏航間距型和滾動(dòng)偏航間距型。每條腿都采用3D打印方式按單個(gè)鉸接部件進(jìn)行打印,不能拆卸,每個(gè)部件都配備Dynamixel XL-320位置控制伺服系統(tǒng)。腳底帶有橡膠墊,可以緩沖腿部承受運(yùn)動(dòng)的壓力和沖擊。
這種支腿設(shè)計(jì)的重點(diǎn)是保持零件的輕量化,同時(shí)仍保持一定程度的結(jié)構(gòu)完整性。每條腿重0.19至0.026磅,具體取決于腿的類(lèi)型。
Snapbot的研制受到了哪些啟發(fā)?
與其他仿生機(jī)器人一樣,Snapbot也受到了生物的啟發(fā),研究人員對(duì)此進(jìn)行了深入研究。他們還特別研究了那些能夠根據(jù)自身情況改變位形的人。當(dāng)一個(gè)人坐著站起來(lái)時(shí),他改變的不僅僅是位置,還有肢體運(yùn)動(dòng),就像海星這樣的動(dòng)物為逃避捕食者能夠自愿斷肢,然后肢體可以再生。
該研究報(bào)告還指出昆蟲(chóng)即使在失去六條腿中的一條或多條腿后仍能行走。研究報(bào)告還引用了青蛙經(jīng)歷的變態(tài)過(guò)程—長(zhǎng)出兩條腿并失去一條尾巴。
在設(shè)計(jì)機(jī)器人時(shí),研究人員還研究了其他模塊化機(jī)器人系統(tǒng),這些系統(tǒng)帶有較小的積木式部件和均勻的聯(lián)軸器。此外,研究人員還研究了如何利用機(jī)器學(xué)習(xí)技術(shù)創(chuàng)建能夠適應(yīng)環(huán)境而不斷變化或改變結(jié)構(gòu)/配置的機(jī)器人。
工作原理 – 拼接
機(jī)器人身體和腿互相分離和重新連接的機(jī)制是通過(guò)磁體元件完成的。總共采用了四塊磁鐵,包括每個(gè)機(jī)器人支腿的連接,使得支腿容易脫離或重新與軀體結(jié)合。磁體還按極性擺放,使四肢按正確方向吸附在正確的部位。
但這些磁性接頭并非僅僅是簡(jiǎn)單的磁體。每個(gè)聯(lián)軸器的中心是一個(gè)8針彈簧式連接器。該連接器用來(lái)傳輸電力為腿部供電,并將數(shù)據(jù)傳遞給腿部以實(shí)現(xiàn)各種腿部動(dòng)作。
工作原理 – 運(yùn)動(dòng)機(jī)制
在Snapbot中,運(yùn)動(dòng)算法是基于機(jī)器人中央主體中的微控制器而設(shè)計(jì)的。該微控制器可實(shí)時(shí)工作,以確定機(jī)器人的腿部配置;然后根據(jù)所連接的腿數(shù)確定其運(yùn)動(dòng)路徑。
根據(jù)這種迭代算法,Snapbot的移動(dòng)僅限于直接前進(jìn),但處理器仍然需要計(jì)算許多變量。一種類(lèi)型的支腿將默認(rèn)14種腿部位形組合,但三種支腿結(jié)合起來(lái),將總共有700種可選的腿部配置。
為了評(píng)估腿部的當(dāng)前配置,控制器對(duì)每條腿上的伺服器進(jìn)行操作以確定所連接的支腿類(lèi)型。通過(guò)將伺服電機(jī)的數(shù)據(jù)線(xiàn)連接到控制器的引腳上,從而確定不同類(lèi)型的支腿位置。每100毫秒完成一次對(duì)該配置的掃描。
然后,處理器根據(jù)配置情況計(jì)算正向運(yùn)動(dòng)路線(xiàn)。腿部運(yùn)動(dòng)包括三種模式:劃船、爬行和行走。只有一條腿時(shí),機(jī)器人使用劃船動(dòng)作來(lái)拖動(dòng)身體。在雙腿配置的任何可變選項(xiàng)中,機(jī)器人通過(guò)爬行運(yùn)動(dòng)將滾動(dòng)式關(guān)節(jié)運(yùn)動(dòng)最大化,以使腳與地面之間更好地接觸,并拖動(dòng)身體。在可以行走的腿部組合配置中,Snapbot可以將其身體抬離地面,并通過(guò)同步使用對(duì)角線(xiàn)雙腿向前行走。
Snapbot的未來(lái)發(fā)展空間
雖然Snapbot展示出了模塊化腿部的可變配置模型以及實(shí)時(shí)機(jī)器學(xué)習(xí)的適應(yīng)能力,但這款機(jī)器人仍然只是該公司研發(fā)的過(guò)渡產(chǎn)品。
迪士尼研究院表示,這款機(jī)器人將“用于進(jìn)一步研究腿部運(yùn)動(dòng)”。該團(tuán)隊(duì)正在計(jì)劃改進(jìn)算法并增加傳感器(如相機(jī)),并檢測(cè)所帶來(lái)的效果。

DevicePlus 編輯團(tuán)隊(duì)
設(shè)備升級(jí)版適用于所有熱愛(ài)電子和機(jī)電一體化的人。
審核編輯黃宇
-
控制器
+關(guān)注
關(guān)注
112文章
16442瀏覽量
179012 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28627瀏覽量
207948
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【Simcenter STAR-CCM+】通過(guò)快速準(zhǔn)確的CFD仿真加速空氣動(dòng)力學(xué)創(chuàng)新

使用Phase Lab鎳基動(dòng)力學(xué)數(shù)據(jù)庫(kù)計(jì)算多組分合金的成分分布曲線(xiàn)

PT500齒輪傳動(dòng)動(dòng)力學(xué)綜合測(cè)試實(shí)驗(yàn)臺(tái)
關(guān)于動(dòng)力學(xué)方程能否用matlab進(jìn)行傅里葉變換的問(wèn)題。
圓滿(mǎn)收官|(zhì) Aigtek參展第二屆波動(dòng)力學(xué)前沿與應(yīng)用學(xué)術(shù)會(huì)議載譽(yù)歸來(lái)!


第14章-藍(lán)牙遙控小車(chē) 藍(lán)牙串口通訊講解藍(lán)牙APP遙控小車(chē) 藍(lán)牙串口通訊講解


foxbot基本操作與應(yīng)用講解
物聯(lián)網(wǎng)如何助力學(xué)校管理升級(jí)
精密力學(xué)檢測(cè)設(shè)備 | 美能電池片拉脫力綜合測(cè)試儀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論