") 基于工控板EMB8628I的無人運(yùn)載小車控制系統(tǒng)
基于工控板EMB8628I的無人運(yùn)載小車控制系統(tǒng)
無人運(yùn)載小車有效實(shí)現(xiàn)了生產(chǎn)過程中的自動(dòng)化流程,降低了生產(chǎn)成本,提高了企業(yè)的競爭力,在企業(yè)的生產(chǎn)過程中發(fā)揮了重要的作用。
無線遙控手柄發(fā)出控制運(yùn)轉(zhuǎn)遙控指令,無線接收器將遙控指令發(fā)送給工控板,工控板根據(jù)遙控指令控制4路伺服(或步進(jìn)電機(jī))進(jìn)行運(yùn)轉(zhuǎn),同時(shí)將運(yùn)轉(zhuǎn)結(jié)果實(shí)時(shí)傳回控制手柄。
我們選用的產(chǎn)品
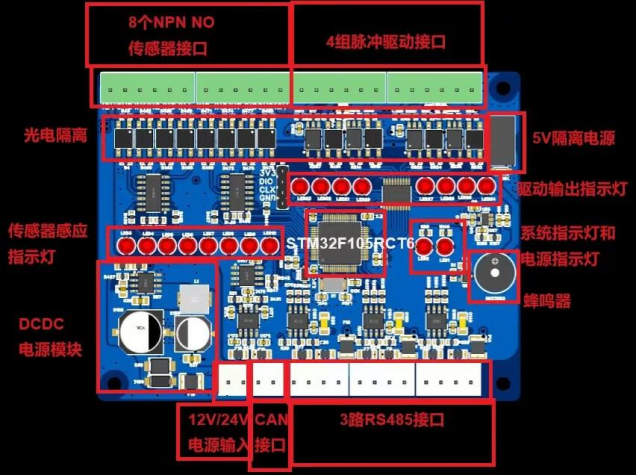
工控板EMB8628I+外置無線通信模塊+4個(gè)電機(jī)驅(qū)動(dòng)器
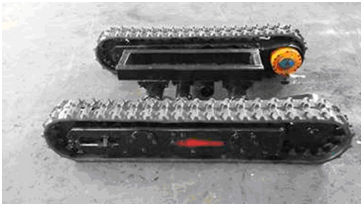
履帶小車系統(tǒng)可分為行走模塊、C型臂探測器模塊、噴霧模塊、激光探測模塊及無線圖像數(shù)據(jù)模塊。

1、移動(dòng)方式:采用履帶式移動(dòng)方式,因整機(jī)前端負(fù)載大,車體采用前驅(qū);考慮到實(shí)際工作中轉(zhuǎn)向,左、右副履帶采用差速、方向模式來實(shí)現(xiàn)轉(zhuǎn)向;
2、移動(dòng)速度:移動(dòng)速度>0.8m/s,定位精度<0.05m;
3、通訊方式:具備有線、無線、紅外、程控的通訊控制方式;
4、無線圖傳模塊:無線圖像傳輸即視頻及圖像數(shù)據(jù),通過無線技術(shù)從采集端到接收端進(jìn)行實(shí)時(shí)傳輸。本系統(tǒng)中無線圖像傳輸技術(shù)主要包括兩個(gè)方面,一是小車在行進(jìn)過程中的移動(dòng)圖像視頻的實(shí)時(shí)傳輸,另外對C型臂采集到的圖片數(shù)據(jù)進(jìn)行實(shí)時(shí)傳輸。
6、4路隔離PWM脈沖輸出,控制4路電機(jī)驅(qū)動(dòng)器
7、4路隔離方向控制DO輸出,控制4路電機(jī)方向
8、4路隔離使能控制DO輸出,控制4路電機(jī)使能
9、4組限位控制輸入:每組包括左限位DI輸入、右限位DI輸入、原點(diǎn)DI輸入
10、一路隔離485總線,外接外部無線模塊,接收遙控指令
11、2路正交編碼器輸入,反饋?zhàn)笥译姍C(jī)的運(yùn)動(dòng)軌跡
12、4路急停DI信號(hào),以實(shí)現(xiàn)迅速停止電機(jī)運(yùn)轉(zhuǎn)
13、4路繼電器輸出(DC24V,驅(qū)動(dòng)電磁閥)
14、工控板應(yīng)滿足工作現(xiàn)場電機(jī)的強(qiáng)電磁干擾要求,不死機(jī)。
15、溫度要求:-20C°~70C°
審核編輯黃宇
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
53文章
8269瀏覽量
146833 -
工控板
+關(guān)注
關(guān)注
0文章
192瀏覽量
13107
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
華北工控發(fā)布高性能EPIC單板EMB-4148
華北工控新品發(fā)布:EMB-3583主板搭載瑞芯微RK3576處理器
華北工控EMB-3582 AIOT主板:驅(qū)動(dòng)汽車智能網(wǎng)聯(lián)新升級(jí)
自動(dòng)控制系統(tǒng)的調(diào)試方法 自動(dòng)控制系統(tǒng)與傳統(tǒng)控制系統(tǒng)的比較
低空經(jīng)濟(jì)的第一助推力,基于鴻道Intewell操作系統(tǒng)的無人機(jī)控制系統(tǒng)
EMB系統(tǒng)功能安全分析(3)
EMB系統(tǒng)功能安全分析(1)

自適應(yīng)藍(lán)牙控制智能小車
工控機(jī)在AGV小車中的關(guān)鍵應(yīng)用,適用于AGV小車的研華工控機(jī)

現(xiàn)場總線控制系統(tǒng)與集散控制系統(tǒng)的對比
前饋控制系統(tǒng)與反饋控制系統(tǒng)的區(qū)別
開環(huán)控制系統(tǒng)與閉環(huán)控制系統(tǒng)的區(qū)別
PLC控制系統(tǒng)與繼電器控制系統(tǒng)的比較
工控板和PLC的區(qū)別在哪
AGV小車升降平臺(tái)控制板





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論