 多傳感器融合成為方向!從前融合到后融合,激光雷達進階3.0時代
多傳感器融合成為方向!從前融合到后融合,激光雷達進階3.0時代
電子發燒友網報道(文/莫婷婷)2020年之前,激光雷達市場國外企業一枝獨秀,2020年,華為進軍激光雷達市場,到了2021年,小鵬汽車推出首款搭載激光雷達的汽車,拉開國內車企激光雷達“上車”的序幕。可以期待的是,隨著量產時代的到來,激光雷達將進入新的發展階段。業內人士預計,下一代激光雷達技術將朝著多傳感器融合的方向演進。
但激光雷達產業的發展還存在一些核心問題亟待解決,例如激光雷達供應商如何在高性能、低成本的前提下,以及更大規模和場景下確保車規量產、交付;怎么才能實現激光雷達所支持的 L2、L3、 L4等更高層級的自動駕駛功能、更高精度的環境感知功能,并且讓用戶真正體驗到激光雷達的價值。
上述都是在激光雷達2.0階段下需要探討的問題,未來進入激光雷達3.0,則需要關注如何提升駕駛安全、用戶體驗、改善感知融合,以及感受激光雷達核心價值。但是從2.0向3.0過渡,激光雷達技術在助力自動駕駛技術演進的過程中還面臨諸多方面的挑戰。
探維科技創始人王世瑋認為自動駕駛感知困局是Robotaxi傳感器性能不斷提高時,融合方案并沒有得到很好的結果。車上傳感器形態持續演進,在能夠降低成本的前提下,廠商需要考慮車規量產,并且要將硬件方案整合到量產車型的配置中,與車身進行融合設計。
例如在汽車廠商中,特斯拉在自動駕駛傳感器的使用上一直在尋找最佳方案。此前,特斯拉采用的是純視覺方案,2022年年底,4D毫米波雷達憑借成本優勢,且分辨率更高,被賽靈思、博世、華為等越來越多廠商所關注,并且特斯拉極有可能將其加入汽車中。4D毫米波雷達也因此被業內人士認為是激光雷達的平替產品。
可以發現,智能汽車中,傳感器不僅僅是激光雷達。Model 3配備8個攝像頭、1個毫米波雷達、12個超聲波雷達。小鵬P5配備了9個攝像頭、2個激光雷達、4個全景攝像頭、5個毫米波雷達和12個超聲波傳感器。探維科技也已經與合創汽車聯合打造了一款搭載激光雷達的MPV,這也是合創V09目前唯一搭載激光雷達的MPV,并且全車配備了24個傳感器。
當傳感器的種類數量增加,汽車廠商必須考慮激光雷達與不同傳感器之間的配合,在算法層、決策層面都要有取舍。不管是系統集成商還是主機廠,傳感器之間如何配合對他們來說都是極大的挑戰。那么,該如何讓智能汽車的各個傳感器與激光雷達實現更好地配合呢?
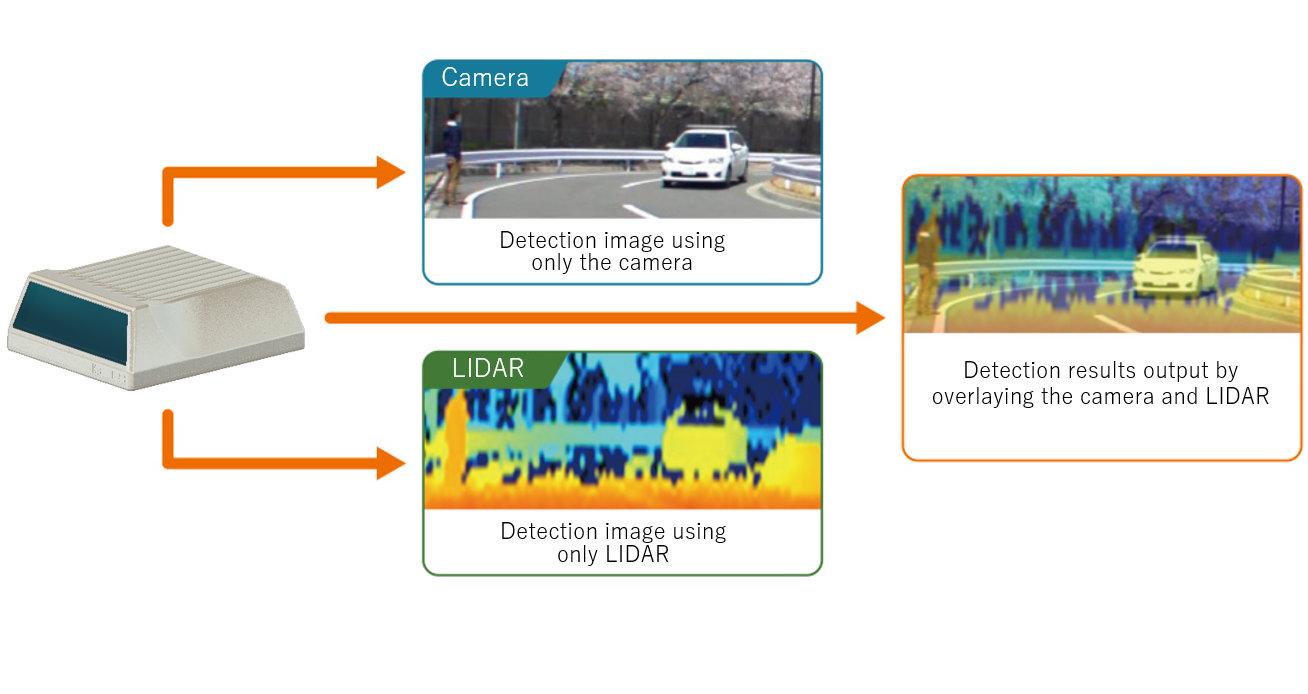
據了解,目前在車載端,激光雷達和其他傳感器之間的配合主要是采用后融合方案,各個傳感器獨立做感知算法,再把結構化的數據做融合,通過系統層做綜合判斷和決策。但目標級圖像后融合還在一些技術難題,比如融合精度低、時間同步困難,系統標定方案復雜、需要融合補償算法等。此外,由于是后融合的架構,因此是先感知再融合,在整個決策過程當中還會涉及關鍵信息的丟失、誤檢率、漏檢率等,其他功能也會受到限制。
探維科技認為激光雷達 3. 0會往硬件級圖像前融合發展,推出了Tanway Fusion解決激光雷達的兼容性、可靠性、適應性問題,能發揮出多傳感器的優勢。以其64線激光雷達為例,該產品的探測距離為200米,分辨率為0.16°*0.32°,空間同步精度可以達到為100米內3cm,時間同步精度達到微秒級。
激光雷達如何提高空間同步精度和時間同步精度呢?據了解,探維科技的方案把圖像sensor加到既有的激光雷達硬件系統當中,內部再用同一套光源同步接收可見光、紅外光,經過數據處理之后就可以拿到前融合的系統。其中融合精度是靠光學,即通過光路系統解決點對應的問題;時間同步是靠同一個硬件,探維科技用同一套時鐘系統保證每一個測量點、像素,讓時間同步精度保持微秒級。
從激光雷達1.0的概念,再到激光雷達2.0,再到3.0,激光雷達技術在不斷迭代,并且助力自動駕駛技術的發展,未來隨著技術的成熟,自動駕駛感知能力也將不斷提升。
但激光雷達產業的發展還存在一些核心問題亟待解決,例如激光雷達供應商如何在高性能、低成本的前提下,以及更大規模和場景下確保車規量產、交付;怎么才能實現激光雷達所支持的 L2、L3、 L4等更高層級的自動駕駛功能、更高精度的環境感知功能,并且讓用戶真正體驗到激光雷達的價值。
上述都是在激光雷達2.0階段下需要探討的問題,未來進入激光雷達3.0,則需要關注如何提升駕駛安全、用戶體驗、改善感知融合,以及感受激光雷達核心價值。但是從2.0向3.0過渡,激光雷達技術在助力自動駕駛技術演進的過程中還面臨諸多方面的挑戰。
探維科技創始人王世瑋認為自動駕駛感知困局是Robotaxi傳感器性能不斷提高時,融合方案并沒有得到很好的結果。車上傳感器形態持續演進,在能夠降低成本的前提下,廠商需要考慮車規量產,并且要將硬件方案整合到量產車型的配置中,與車身進行融合設計。
例如在汽車廠商中,特斯拉在自動駕駛傳感器的使用上一直在尋找最佳方案。此前,特斯拉采用的是純視覺方案,2022年年底,4D毫米波雷達憑借成本優勢,且分辨率更高,被賽靈思、博世、華為等越來越多廠商所關注,并且特斯拉極有可能將其加入汽車中。4D毫米波雷達也因此被業內人士認為是激光雷達的平替產品。
可以發現,智能汽車中,傳感器不僅僅是激光雷達。Model 3配備8個攝像頭、1個毫米波雷達、12個超聲波雷達。小鵬P5配備了9個攝像頭、2個激光雷達、4個全景攝像頭、5個毫米波雷達和12個超聲波傳感器。探維科技也已經與合創汽車聯合打造了一款搭載激光雷達的MPV,這也是合創V09目前唯一搭載激光雷達的MPV,并且全車配備了24個傳感器。
當傳感器的種類數量增加,汽車廠商必須考慮激光雷達與不同傳感器之間的配合,在算法層、決策層面都要有取舍。不管是系統集成商還是主機廠,傳感器之間如何配合對他們來說都是極大的挑戰。那么,該如何讓智能汽車的各個傳感器與激光雷達實現更好地配合呢?
據了解,目前在車載端,激光雷達和其他傳感器之間的配合主要是采用后融合方案,各個傳感器獨立做感知算法,再把結構化的數據做融合,通過系統層做綜合判斷和決策。但目標級圖像后融合還在一些技術難題,比如融合精度低、時間同步困難,系統標定方案復雜、需要融合補償算法等。此外,由于是后融合的架構,因此是先感知再融合,在整個決策過程當中還會涉及關鍵信息的丟失、誤檢率、漏檢率等,其他功能也會受到限制。
探維科技認為激光雷達 3. 0會往硬件級圖像前融合發展,推出了Tanway Fusion解決激光雷達的兼容性、可靠性、適應性問題,能發揮出多傳感器的優勢。以其64線激光雷達為例,該產品的探測距離為200米,分辨率為0.16°*0.32°,空間同步精度可以達到為100米內3cm,時間同步精度達到微秒級。
激光雷達如何提高空間同步精度和時間同步精度呢?據了解,探維科技的方案把圖像sensor加到既有的激光雷達硬件系統當中,內部再用同一套光源同步接收可見光、紅外光,經過數據處理之后就可以拿到前融合的系統。其中融合精度是靠光學,即通過光路系統解決點對應的問題;時間同步是靠同一個硬件,探維科技用同一套時鐘系統保證每一個測量點、像素,讓時間同步精度保持微秒級。
從激光雷達1.0的概念,再到激光雷達2.0,再到3.0,激光雷達技術在不斷迭代,并且助力自動駕駛技術的發展,未來隨著技術的成熟,自動駕駛感知能力也將不斷提升。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2552文章
51382瀏覽量
755906 -
激光雷達
+關注
關注
968文章
4024瀏覽量
190275
發布評論請先 登錄
相關推薦
京瓷發布全球首款“攝像頭-激光雷達”融合傳感器
近日,京瓷株式會社在傳感器技術領域取得了重大突破,成功開發出全球首款獨特的“攝像頭-激光雷達(Camera-LiDAR)”融合傳感器。這款傳感器
激光雷達+攝像頭融合傳感器,有沒有搞頭?
電子發燒友網報道(文/梁浩斌)對于自動駕駛而言,除了自動駕駛算法之外,傳感器標定一直都是一個難題,一般會在車輛出廠前駛入到專門的場地使用特定設備來對各種傳感器進行校準。尤其是多傳感器硬
雨量水位數據采集終端機RTU:多傳感器融合,水文監測數據遠程查看
多傳感器融合的雨量水位數據采集終端機RTU,正以其卓越的性能和全面的數據采集能力,成為水文監測領域的得力助手。讓我們共同迎接精準監測的新時代
多傳感器融合在自動駕駛中的應用趨勢探究
整合分析,多傳感器融合不僅能夠彌補單一傳感器的局限性,還大大提升了感知系統的精確性。 ? 智能駕駛傳感器的種類及技術概述 1.1

激光雷達在SLAM算法中的應用綜述
SLAM算法運行的重要傳感器。基于激光雷達的SLAM算法,對激光雷達SLAM總體框架進行介紹,詳細闡述前端里程計、后端優化、回環檢測、地圖構建模塊的作用并總結所使用的算法;按由2D到 3D,單

激光雷達與其他傳感器的比較
在現代科技領域,傳感器技術的發展日新月異,為各行各業提供了強大的數據支持。激光雷達作為一種高精度的遙感技術,近年來在多個領域得到了廣泛應用。然而,激光雷達并非萬能,它與其他傳感器相比,
MSP430F5xx系列上使用方向余弦矩陣算法的九軸傳感器融合
電子發燒友網站提供《MSP430F5xx系列上使用方向余弦矩陣算法的九軸傳感器融合.pdf》資料免費下載
發表于 10-18 10:40
?0次下載


半導體激光雷達及傳感器件產業化項目落地德州
5月31日下午,德州天衢新區管委會與廣東先導稀材股份有限公司簽訂總投資50億元的半導體激光雷達及傳感器件產業化項目投資協議,標志著繼有研、立訊之后,德州新一代信息技術產業進入新的發展階段。 ? 根據
森思泰克全新推出96線激光雷達和192線激光雷達產品
多傳感器融合方案是智能駕駛感知技術的必然趨勢。它以攝像頭、毫米波雷達、超聲波雷達以及激光雷達等多

未來已來,多傳感器融合感知是自動駕駛破局的關鍵
的信息,將感知系統的感知維度擴展以實現多維度(多模態)感知目標的完整信息。如下圖示例,芯片將攝像頭圖像數據,和雷達探測目標的距離、速度、散射截面R的感知數據,以及紅外傳感器探測的熱輻射圖像數據疊加組
發表于 04-11 10:26
傳感器融合的工作原理
你怎么知道你在哪里?什么是真實的?這是傳感器融合應該回答的問題。不是以哲學的方式,而是字面上的“我會自動撞入白宮嗎?因為我被告知不要這樣做”,這種方式內置于商業四軸飛行器的固件中。
發表于 04-04 13:11
?716次閱讀
深度解析:多傳感器融合SLAM技術全景剖析
SLAM中,先驗值通常從一系列傳感器獲得,比如慣性測量單元(IMU)和編碼器,而觀測值則是通過GPS、相機和激光雷達等其他傳感器獲取的,后驗
發表于 02-23 11:31
?3376次閱讀






 工商網監
工商網監
評論