 KUKA系統變量$INTERPRETER解釋器
KUKA系統變量$INTERPRETER解釋器
提交解釋器的狀態顯示

機器人解釋器的狀態顯示。可在此處重置或取消勾選程序。


選擇了提交解釋器。語句指針位于所選提交程序的首行。

已選擇 SUB 程序并且正在運行。

提交解釋器被停止。

選擇了提交解釋器。
$INTERPRETER 解釋器系統變量
通過變量可以讀取許多系統狀態,并且在許多情況下也可以進行設置。嚴格來說,這些變量存在多次-每個解釋器一次。對于所有解釋器,它們的名稱相同。
例子:
?程序運行模式($PRO_MODE)
程序狀態($PRO_STATE)
?進程指針的數據($PRO_IP)
?解釋器當前正在等待的WAITFOR語句($ WAIT_FOR [])
當訪問這樣的變量時,它總是自動引用到當前解釋器。這是由$ INTERPRETER定義的。
默認情況下,機械手控制器以“單提交”模式運行。這意味著有兩個任務同時運行:
?機器人解釋器
運動程序在機器人解釋器中運行。
?系統提交解釋器
程序SPS.SUB通過系統提交解釋器運行。 SPS.SUB程序用于控制器內部的提交任務。
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
變量
+關注
關注
0文章
613瀏覽量
28445 -
KUKA
+關注
關注
3文章
217瀏覽量
16588 -
解釋器
+關注
關注
0文章
103瀏覽量
6551
原文標題:KUKA 系統變量$INTERPRETER解釋器
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦


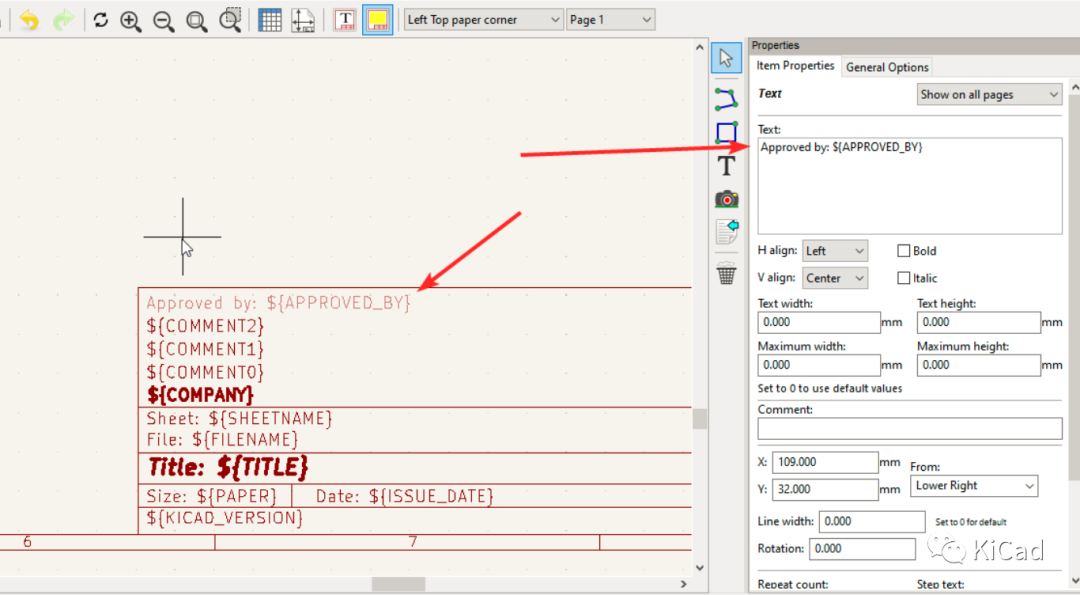
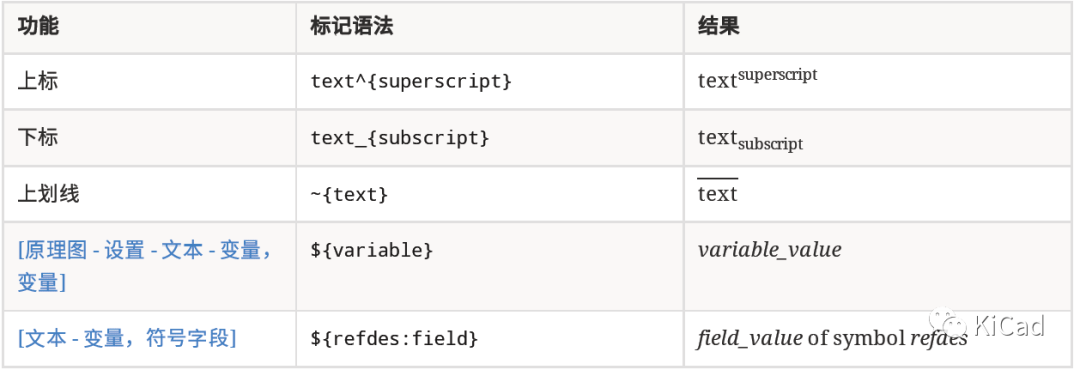
如何在文本字段中使用上標、下標及變量
在KiCad的任何文本字段中,都可以通過以下的方式實現上標、下標、上劃線以及顯示變量及字段值的描述: 文本變量“文本變量”可以在 原理圖設置->工程->文本變量 中設置。下圖中設置了一
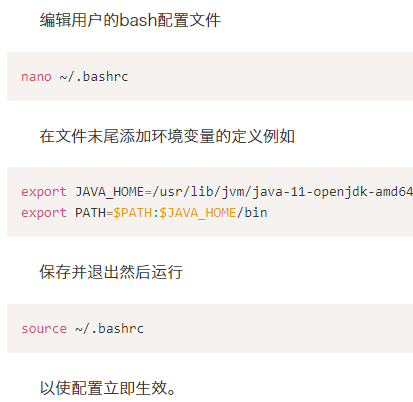
Linux環境變量配置方法
Linux上環境變量配置分為設置永久變量和臨時變量兩種。環境變量設置方法同時要考慮環境Shell類型,不同類型的SHELL設置臨時變量方法和
技術干貨驛站 ▏深入理解C語言:基本數據類型和變量
語言的知識,為后續的編程學習打下堅實的基礎。1基本數據類型在C語言中,數據類型指的是用于聲明不同類型的變量或函數的一個廣泛的系統,用于定義變量的類型,以及在編程過程


全局變量太多有哪些弊端?
隨著全局變量的增多,不同模塊的變量名可能會產生沖突或混淆,導致代碼難以理解和維護。同時,全局變量使得代碼中的依賴關系變得復雜,難以追蹤和理解。這增加了新開發人員的學習成本,也增加了修改和調試的難度。
發表于 04-24 09:15
?940次閱讀
實踐GoF的23種設計模式:解釋器模式
解釋器模式(Interpreter Pattern)應該是 GoF 的 23 種設計模式中使用頻率最少的一種了,它的應用場景較為局限。

C語言數據類型有哪些
在 C 語言中,數據類型指的是用于聲明不同類型的變量或函數的一個廣泛的系統。變量的類型決定了變量存儲占用的空間,以及如何解釋存儲的位模式。
發表于 03-20 10:56
?510次閱讀

C語言變量應用詳解
變量其實只不過是程序可操作的存儲區的名稱。C 中每個變量都有特定的類型,類型決定了變量存儲的大小和布局,該范圍內的值都可以存儲在內存中,運算符可應用于變量上。
發表于 03-18 11:18
?453次閱讀


Linux系統中設置環境變量的方法和技巧
在Linux中環境變量是一種保存有關系統環境配置的信息的對象。它們被廣泛用于存儲有關系統操作的信息比如路徑、文件名等。通過合理配置環境變量我們可以方便地訪問和執行各種命令和程序。





 工商網監
工商網監
評論