") 生成現(xiàn)實世界中各種室內(nèi)環(huán)境的3D地圖的無人機應(yīng)用
生成現(xiàn)實世界中各種室內(nèi)環(huán)境的3D地圖的無人機應(yīng)用
盡管許多建筑物都有竣工2D平面圖,但在需要時通常無法足夠快地提供這些平面圖。這些計劃也經(jīng)常過時,因為建筑物經(jīng)常變化,而且使用靜態(tài)測繪系統(tǒng)(如地面激光掃描儀(TLS))更新其信息的成本很高。我們提出了一種能夠生成現(xiàn)實世界中各種室內(nèi)環(huán)境的3D地圖的無人機。與常用的無人機相比,我們通過使用簡單且相對低成本的傳感器來保持無人機設(shè)計盡可能便宜。反過來,這會導(dǎo)致在發(fā)生碰撞時易于更換的無人機。提出的無人機具有以下特性:
①在硬件方面,它是一架微型無人機,配備六個1D掃描儀和一個光流量傳感器。我們選擇了平臺和連接的傳感器,在性能、應(yīng)用、尺寸和成本之間進(jìn)行權(quán)衡。
②在軟件方面,我們的無人機采用基于特征的圖形SLAM進(jìn)行定位和映射。我們的SLAM受到Karam等人的啟發(fā)。它旨在通過連續(xù)LiDAR數(shù)據(jù)中檢測到的線性段來映射具有平面結(jié)構(gòu)的室內(nèi)環(huán)境。
我們配置了一個微型無人機,帶有一個用于測繪和避障的多范圍甲板,以及一個用于測量水平運動的Flow甲板V2。兩副牌都由Bitcraze出售。無人機的圖片如圖1 所示,它是一種四軸飛行器微型無人機,尺寸為182 × 158 × 56毫米,最大有效載荷能力約為 150克。微型無人機基于四軸飛行器配置,因為它的結(jié)構(gòu)簡單,控制穩(wěn)定。
該平臺配備了四個塑料螺旋槳,電子速度控制器(ESC)和四個SkyRC X2208電機,直徑為28毫米,長度為35毫米,重量為37.5克。無人機由兩節(jié)三節(jié)鋰電池供電,標(biāo)稱電壓為11.1 V,尺寸為57 × 30 × 23毫米,重量為70克,最小容量為800mAh。電池為長達(dá)12分鐘的連續(xù)飛行提供能量。包括無人機結(jié)構(gòu)(52克)在內(nèi)的關(guān)鍵部件的總重量為401.5克。由于我們的無人機配備了一維掃描儀,因此每個時間戳記錄的激光數(shù)據(jù)不足以提取平面段。因此,我們利用EKF預(yù)測的點云來提取平面段(圖2)。
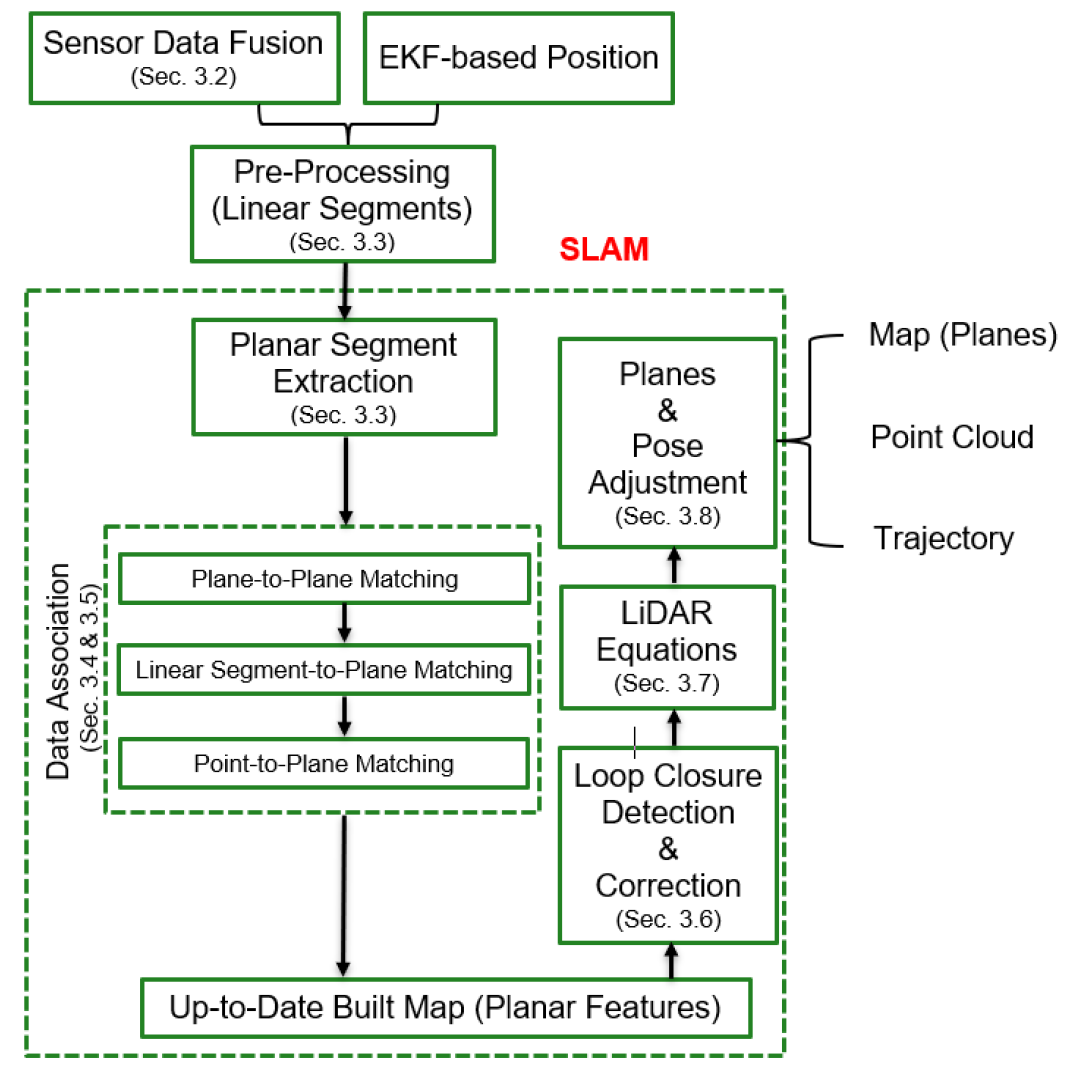
圖2算法總體框架
我們通過使用線分割算法,在預(yù)測的點云中獨立地檢測到每個邊走廊的線性段,然后基于線性段提取平面段,假設(shè)墻是垂直的(圖3)。對于垂直測距儀,使用表面生長分割提取平面段。
圖3.左側(cè)護(hù)林員在走廊左側(cè)墻壁上捕獲的激光點的俯視圖。顏色顯示平面關(guān)聯(lián),黑線表示提取的平面(2D 邊界框)
我們從三個不同的測試站點收集了數(shù)據(jù)。在每個站點,我們選擇了映射場景,使操作員無法從起飛位置看到觀察到的空間。第一個、第二個和第三個數(shù)據(jù)集,命名為ITC1、ITC2和ITC3,是在荷蘭恩斯赫德的特溫特大學(xué)地理信息科學(xué)和地球觀測學(xué)院(ITC)大樓收集的。ITC1是L形六邊形形式的走廊(圖 4 和圖5),而ITC3是圍繞不規(guī)則形狀房間的環(huán)形(圖 6)。ITC1和ITC2(圖7)數(shù)據(jù)集分別用于評估所提出的室內(nèi)測繪方法的性能,分別與RIEGL TLS(圖5)和平面圖獲得的地面事實進(jìn)行比較。
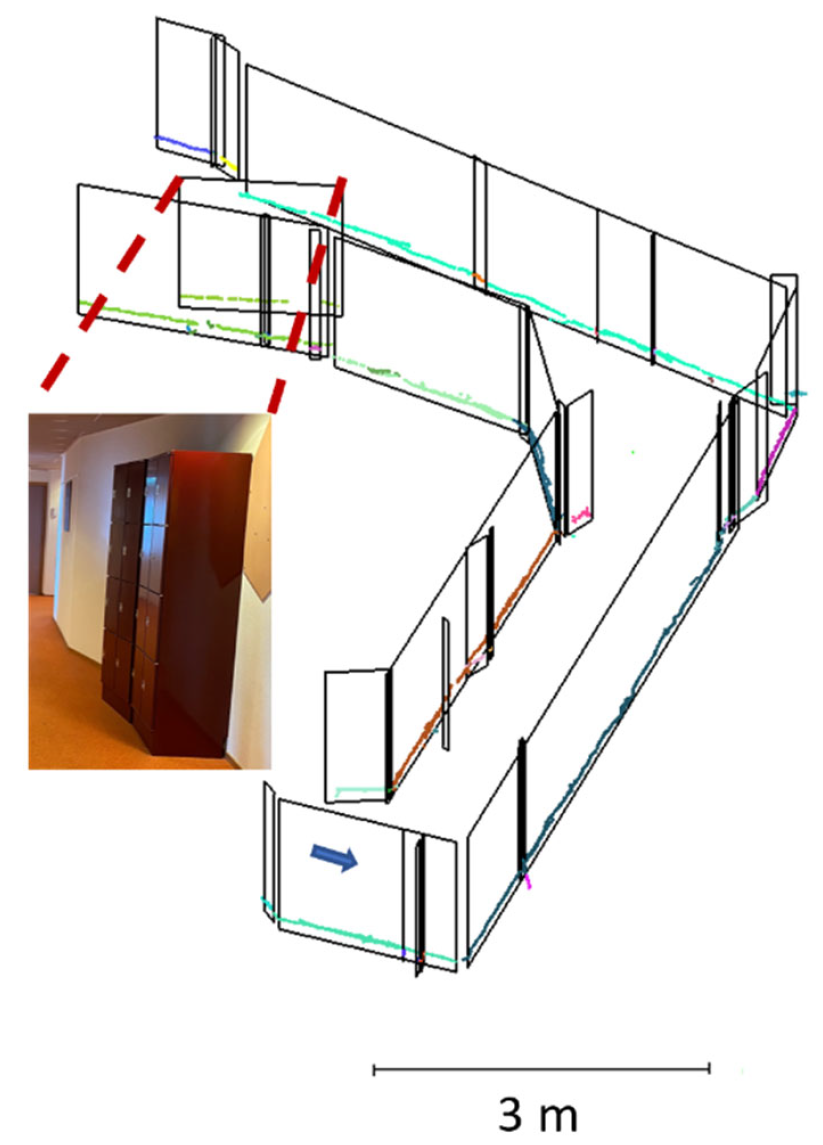
圖4.ITC1 數(shù)據(jù)集的點云(顏色顯示平面關(guān)聯(lián))與墻平面(黑線)的傾斜視圖。藍(lán)色箭頭表示起始位置,紅色虛線表示位于走廊中的櫥柜。出于可視化目的,未顯示天花板和樓層點

圖5.ITC1數(shù)據(jù)集的TLS 3D點云的傾斜視圖。出于可視化目的,未顯示天花板和樓層點
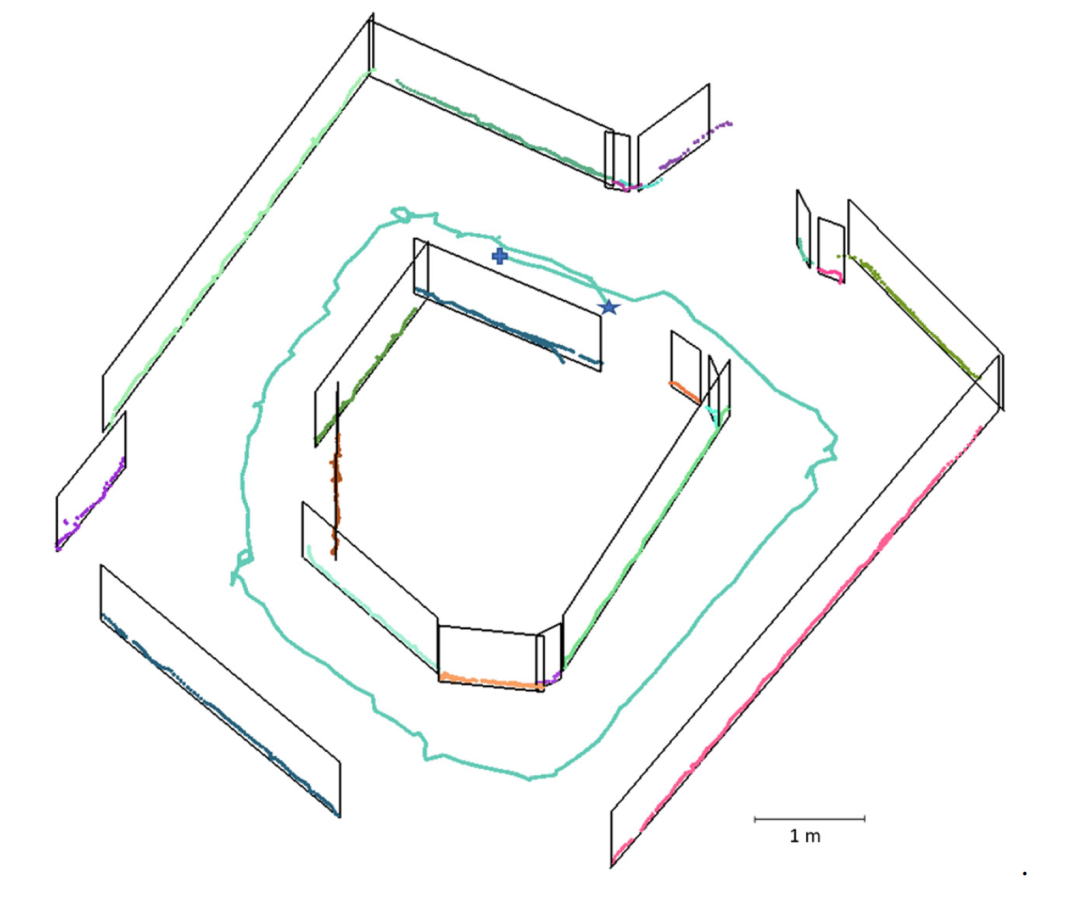
圖6.ITC3 數(shù)據(jù)集的點云(顏色顯示平面關(guān)聯(lián))與墻平面(黑線)的傾斜視圖。藍(lán)星和加號分別指軌跡的起點和終點(綠松石色)。出于可視化目的,未顯示天花板和樓層點
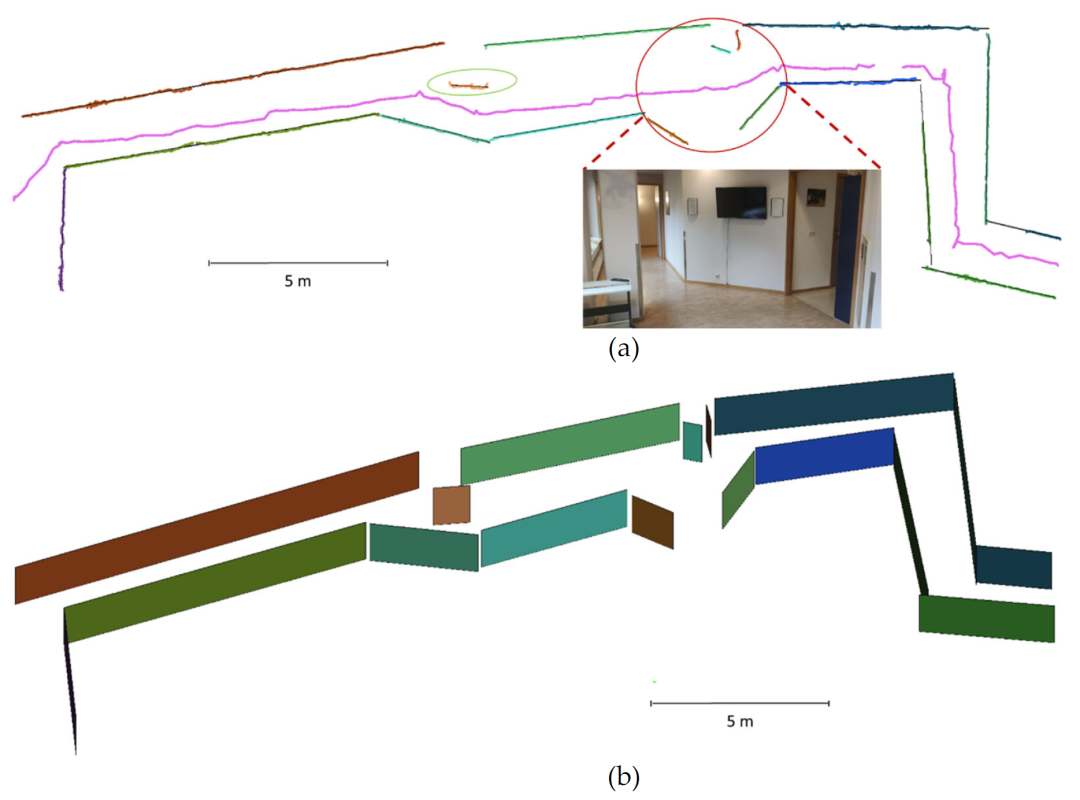
圖7.我們的ITC2數(shù)據(jù)集地圖。(a) 我們的點云(顏色顯示平面關(guān)聯(lián))與墻平面(黑線)的俯視圖。出于可視化目的,不顯示樓層的點。綠色橢圓形環(huán)繞著走廊上的一根柱子。紅色虛線表示走廊中的相應(yīng)空間。(b) 地圖的傾斜視圖
第四個數(shù)據(jù)集名為“公寓”,收集在德國明斯特一個典型學(xué)生公寓的走廊上。與ITC數(shù)據(jù)集類似,我們利用該數(shù)據(jù)集來評估無人機在繪制室內(nèi)空間方面的性能,并將地圖中的一些距離與平面圖中的相應(yīng)距離進(jìn)行比較(圖8)。
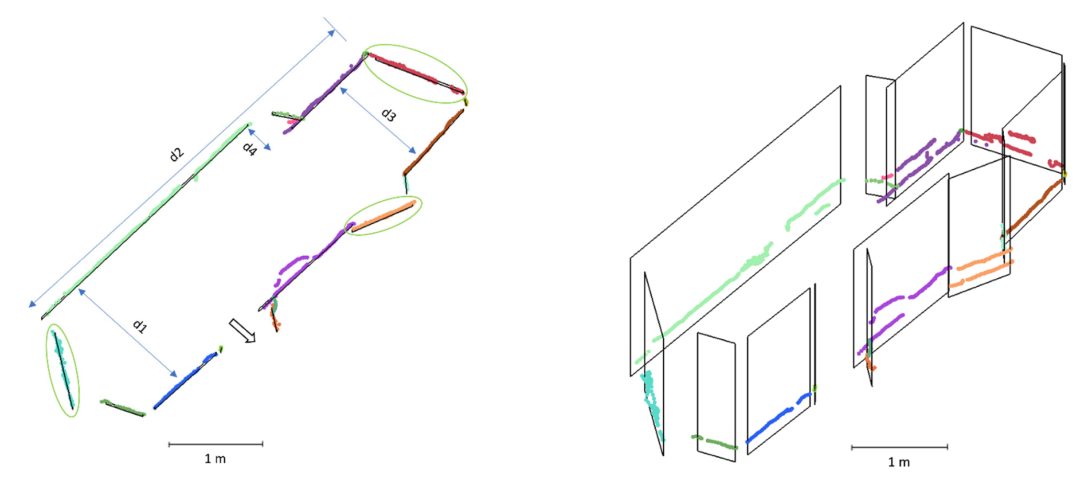
圖8 公寓數(shù)據(jù)集的點云的頂視圖(左)和傾斜視圖(右)。顏色顯示平面關(guān)聯(lián)。出于可視化目的,不顯示天花板和地板的點。黑色 2D 邊界框表示重建的平面。綠色橢圓形環(huán)繞著打開的門,藍(lán)色箭頭表示距離測量值,黑色箭頭指向另一個空間的開口
第五和第六個數(shù)據(jù)集分別命名為DLR1和DLR2,在德國柏林的德國航空航天中心(DLR)室內(nèi)捕獲。DLR1數(shù)據(jù)集是從走廊和打印機室獲得的,它們通過一扇敞開的門連接(圖9)。DLR2數(shù)據(jù)集是在幾乎U形的空間中捕獲的(圖10)。這些數(shù)據(jù)集用于將擬議的室內(nèi)測繪方法的性能與IPS頭盔和MAX無人機的性能進(jìn)行比較。
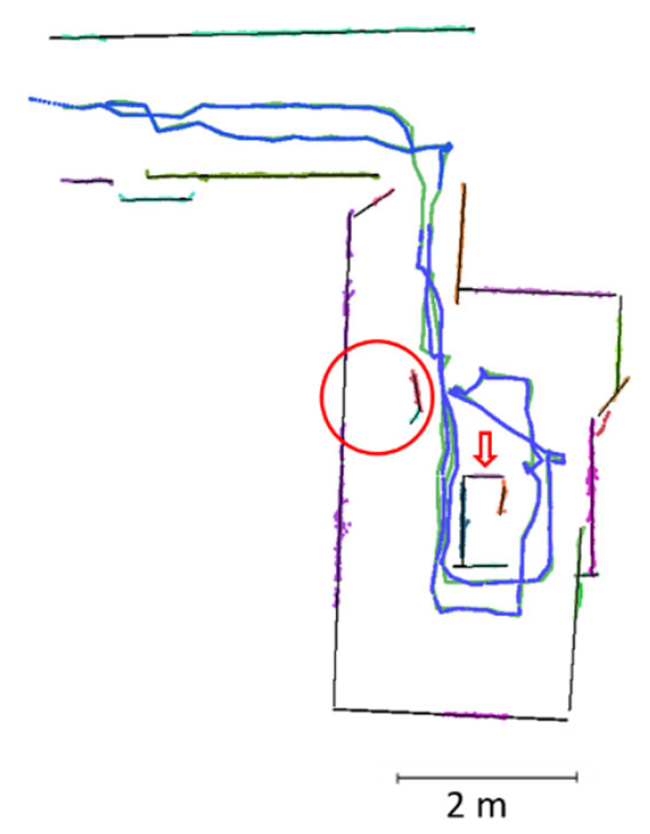
圖9.DLR1數(shù)據(jù)集的點云(顏色顯示平面關(guān)聯(lián))與墻平面(黑線)的俯視圖。天花板點(藍(lán)色)和地板點(綠色)在掃描空間的中間重疊。紅色圓圈表示物體(打印機),紅色箭頭指向櫥柜,參見圖11
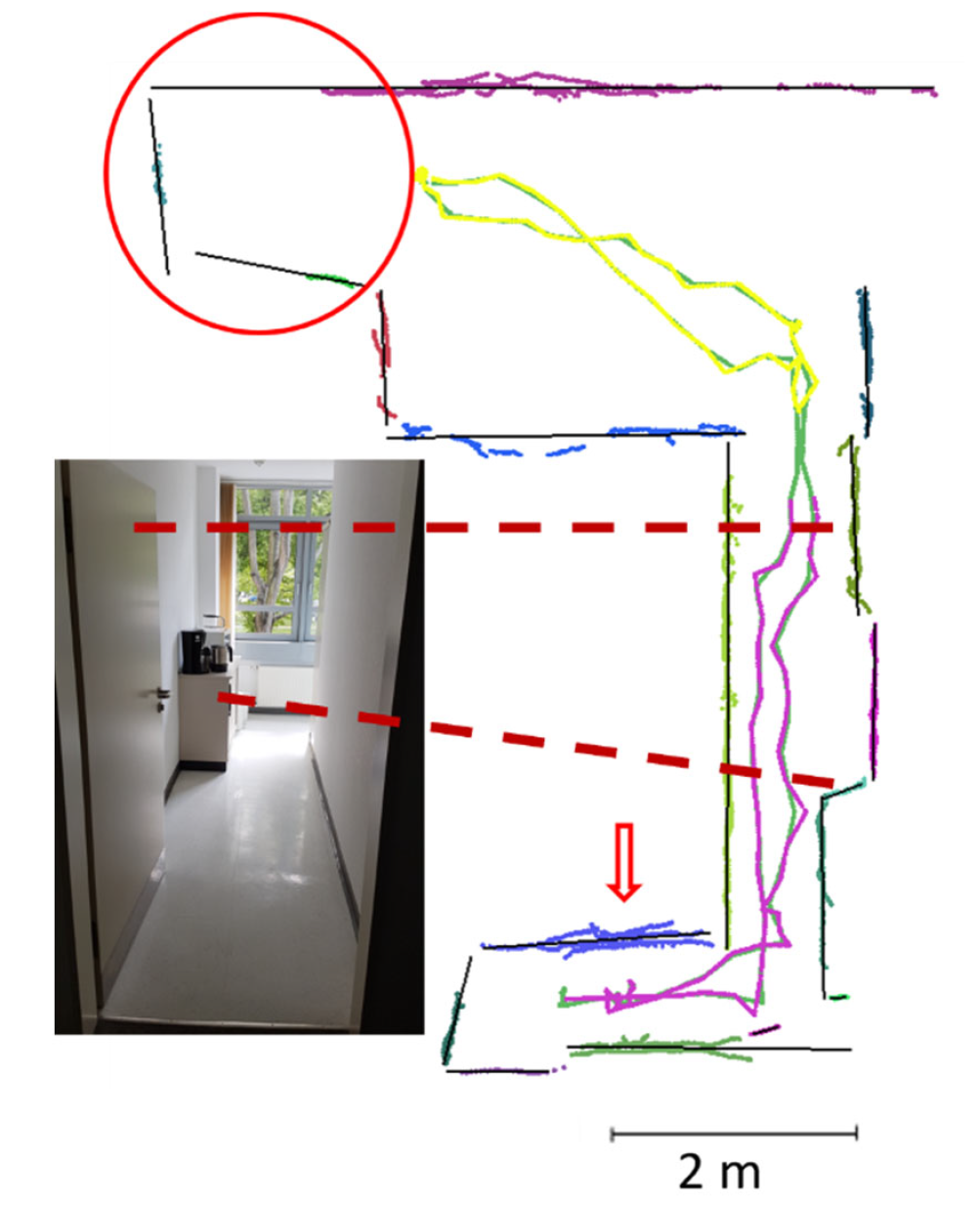
圖10.DLR2數(shù)據(jù)集的點云(顏色顯示平面關(guān)聯(lián))與墻平面(黑線)的頂視圖。天花板(黃色和粉紅色)和地板點(綠色)兩個不同高度的點在掃描空間的中間重疊。紅色圓圈表示我們的無人機未訪問的區(qū)域,紅色箭頭指向廚房空間。紅色虛線表示廚房中的相應(yīng)物體
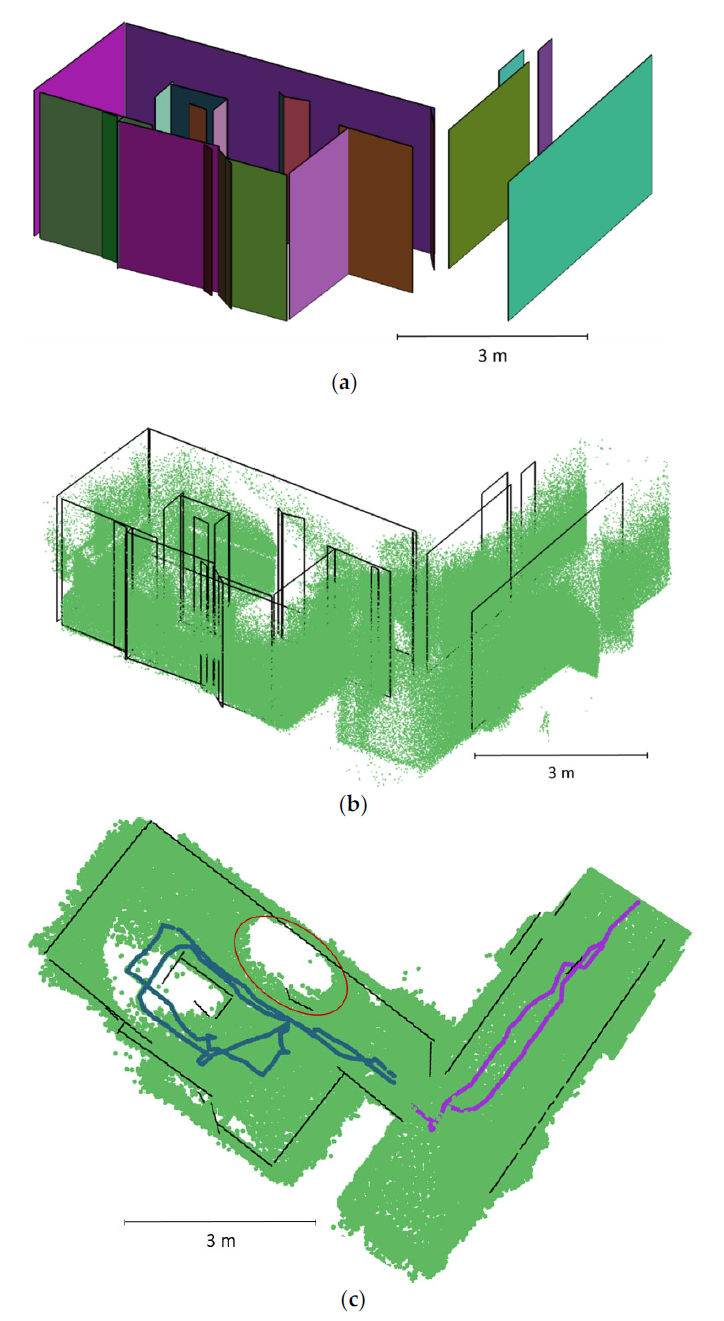
圖 11.MAX和我們的DLR1數(shù)據(jù)集地圖。(a)地圖的傾斜視圖(彩色邊界框是指3D平面要素)。(b)MAX 3D點云(綠色)和我們的地圖的傾斜視圖(黑色邊界框是指 3D 平面特征)。(c)MAX 3D點云(綠色)和我們的地圖(黑色邊界框指3D平面特征)的頂視圖,其中點位于天花板的兩個不同高度(藍(lán)色和紫色)。紅色圓圈表示對象(打印機)
同樣,DLR數(shù)據(jù)集的點云(圖 9和圖 10)在幾何上與MAX無人機(圖11)和IPS頭盔(圖 12)得出的相應(yīng)點云相似。此外,圖12表明,我們的點云比IPS點云更精確地描繪了DLR站點的幾何形狀。
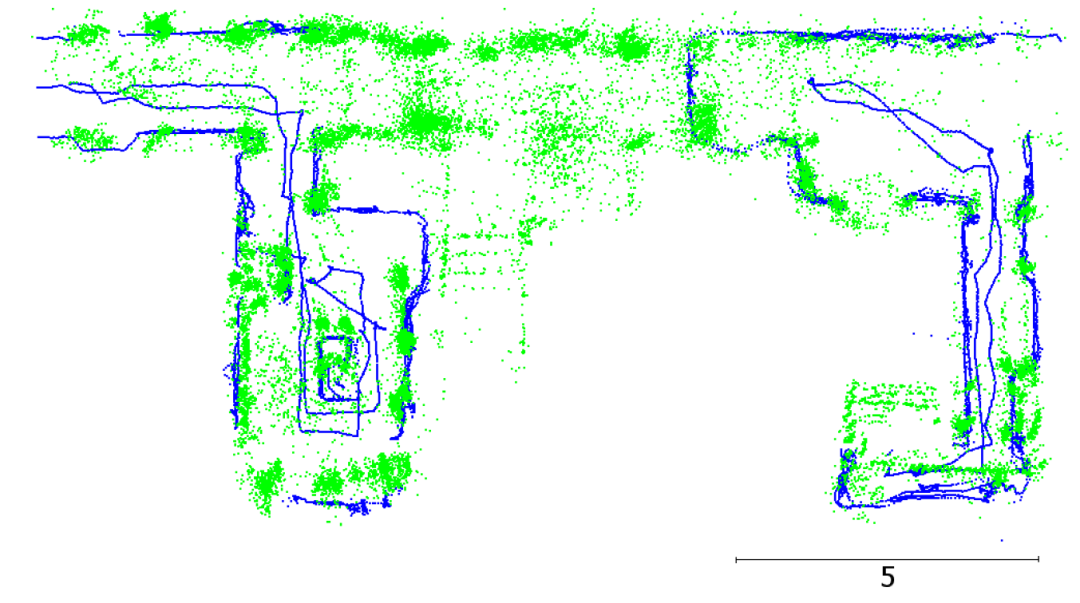
圖12 DLR數(shù)據(jù)集的IPS 3D 點云(綠色)和點云(藍(lán)色)的俯視圖
我們的無人機能夠繪制本研究中使用的所有測試地點,并提供點云形狀的地圖,這為探索目的提供了足夠的信息。實驗結(jié)果表明,我們的無人機在繪制小型室內(nèi)空間方面具有良好的性能。從我們的點云與與之進(jìn)行比較的系統(tǒng)(MAX無人機,IPS頭盔和TLS)的點云之間的偏差相對較低中可以明顯看出這一點。此外,與平面圖的比較表明,距離差異不超過15厘米。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2552文章
51383瀏覽量
755957 -
控制器
+關(guān)注
關(guān)注
112文章
16444瀏覽量
179141 -
無人機
+關(guān)注
關(guān)注
230文章
10515瀏覽量
181942
原文標(biāo)題:基于微無人機的室內(nèi)測繪與圖形 SLAM
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
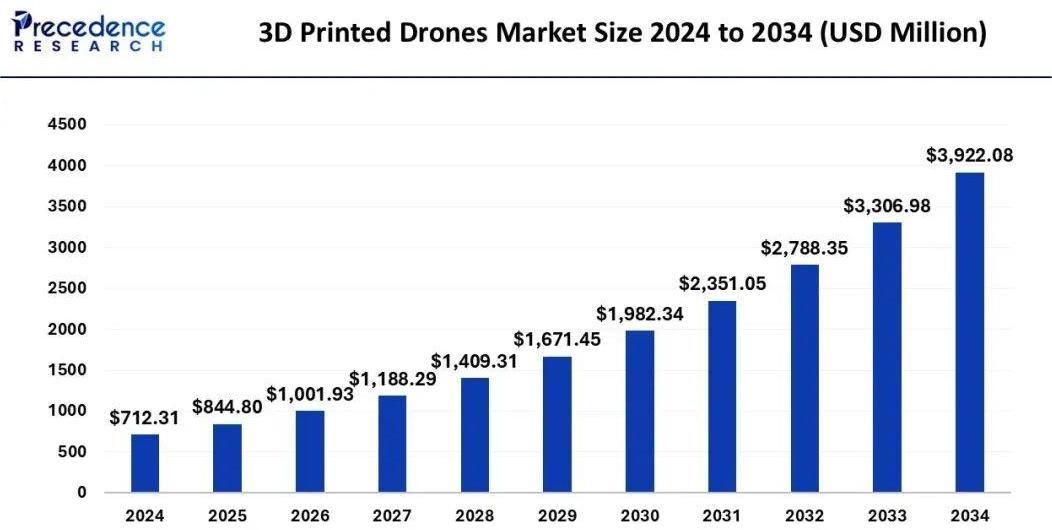
未來十年3D打印無人機市場規(guī)模及預(yù)測
海外首款由激光雷達(dá)驅(qū)動的無人機發(fā)布
室內(nèi)溫濕度控制解決方案
激光雷達(dá)技術(shù)或可助力防御無人機
華盛昌多功能室內(nèi)環(huán)境監(jiān)測設(shè)備滿足不同特殊氣體監(jiān)測的需求
【龍芯2K0300蜂鳥板試用】第十篇 龍芯2K0300蜂鳥板--基于龍芯2k300的室內(nèi)環(huán)境監(jiān)控系統(tǒng)v0.8版
【龍芯2K0300蜂鳥板試用】第八篇 龍芯2K0300蜂鳥板--基于龍芯2k300的室內(nèi)環(huán)境監(jiān)控系統(tǒng)v0.1版
開源項目!用ESP8266 DIY會爬墻的無人機
無人機助推低空經(jīng)濟展翅高飛!第八屆世界無人機大會暨國際低空經(jīng)濟與無人機展即將召開

第四集 知語云智能科技無人機反制技術(shù)與應(yīng)用--無人機的組成與工作原理
第三集 知語云智能科技無人機反制技術(shù)與應(yīng)用--無人機的應(yīng)用領(lǐng)域
第二集 知語云智能科技無人機反制技術(shù)與應(yīng)用--無人機的發(fā)展歷程
第一集 知語科技無人機反制技術(shù)與應(yīng)用--無人機的定義與分類
DLTAP701SD主控芯片驅(qū)動的5V2.4M高頻加濕器:一種創(chuàng)新的室內(nèi)環(huán)境優(yōu)化方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論