") 取消超聲波傳感器,Tesla Vision終于完滿了嗎?
取消超聲波傳感器,Tesla Vision終于完滿了嗎?
Tesla宣布取消USS=Ultra-Sonic Sensor低速狀態(tài)下超聲波感知子系統(tǒng)的傳言,在圈兒內(nèi)是發(fā)生在2022年年中時(shí)期的,互聯(lián)網(wǎng)上關(guān)于Tesla終于要揮刀向USS的傳言此起彼伏。九月份的CVPR2022上,Ashok做了關(guān)于基于純視覺(jué)的Occupancy Network的技術(shù)報(bào)告之后,這種傳言似乎得到了某種加強(qiáng)。而在隨后的Tesla AI Day 2022開(kāi)放日活動(dòng)上,Occupancy Network如何落地得到了進(jìn)一步解釋。關(guān)注Tesla取消USS技術(shù)傳聞的業(yè)內(nèi)人士已經(jīng)明顯可以看到,Occupancy Network神經(jīng)網(wǎng)絡(luò)技術(shù)所體現(xiàn)出來(lái)的Geo位置屬性高于Ontology物質(zhì)類別屬性的識(shí)別能力,對(duì)于能否滿足低速、復(fù)雜地貌下的泊車需求,幾乎就是針尖兒對(duì)麥芒了……
AI Day的3天后,靴子落地。10月4日Tesla官網(wǎng)宣布,Tesla將率先在Model 3和Model Y車型2023款上取消全部十二個(gè)USS傳感器, Tesla Vision至少?gòu)呐渲蒙希吔隄M……
被放棄的USS到底是什么?
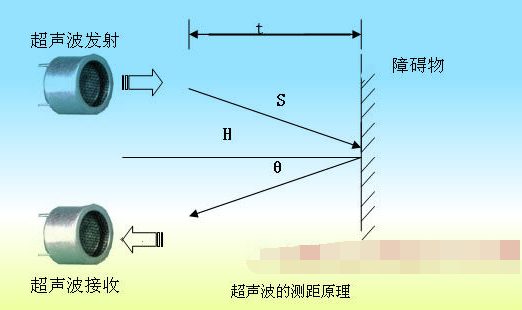
談到車載傳感器,國(guó)內(nèi)汽車行業(yè)已經(jīng)卷到一個(gè)相當(dāng)?shù)某潭龋行?shí)現(xiàn)商業(yè)量產(chǎn)的車輛,能達(dá)到一輛車上配置40顆左右的傳感器,并以此為強(qiáng)大的商業(yè)賣點(diǎn),實(shí)在是讓小編有點(diǎn)嘆為觀止。其中的超聲波雷達(dá)是汽車中最為常見(jiàn)的一種傳感器。它是通過(guò)反射超聲波裝置實(shí)現(xiàn)發(fā)射超聲波,并接受回來(lái)的反射波后,測(cè)算車輛本體距離反射體的距離。時(shí)至今日,現(xiàn)代車輛的周邊傳感器已經(jīng)是武裝到牙齒了,從傳感器類別看,超聲波只是其中之一。
相對(duì)于其它常見(jiàn)的傳感器大類:毫米波雷達(dá)、激光雷達(dá)和攝像頭來(lái)看,超聲波雷達(dá)有其特殊性:它并非是以電磁波的形式來(lái)輻射測(cè)量信號(hào)的,而是聲波-Voice Wave。而二者之間有著本質(zhì)的不同。所以,一般的技術(shù)讀者有時(shí)候會(huì)忽視這個(gè)關(guān)鍵的前置條件,小編這里特意強(qiáng)調(diào)一下:聲波在空氣中的聲速只有340m/s,相對(duì)于電磁波的光速300000000m/s,是一個(gè)非常低的速度指標(biāo)。所以當(dāng)我們看到主流的車載超聲波傳感器工作頻率在40KHz的時(shí)候,不要想當(dāng)然地把它歸為電磁波機(jī)制下的長(zhǎng)波超長(zhǎng)波系統(tǒng)。
注:聲速下,以40KHz的超聲波雷達(dá)為例,其工作波長(zhǎng)大約是340m/40,000Hz=8.5mm。在這個(gè)波長(zhǎng)尺度上的超聲波系統(tǒng),理論上可以以毫米mm的精度級(jí)別對(duì)障礙物(回波體)進(jìn)行測(cè)距。雖然波長(zhǎng)也在mm毫米級(jí)別,但超聲波系統(tǒng)和基于電磁波機(jī)制的雷達(dá)(小編:多數(shù)毫米波雷達(dá)工作在30GHz-300GHz之間,波長(zhǎng)在1mm-10mm之間,也屬于毫米波系統(tǒng))還是有著本質(zhì)的區(qū)別。小編自己沒(méi)有親自嘗試過(guò),但一些消費(fèi)者視頻顯示,超聲波雷達(dá)在工作時(shí),其圓形的震動(dòng)薄膜機(jī)構(gòu)是有明顯的手觸感的,但車頭的毫米波雷達(dá)和激光雷達(dá)(納米波)顯然不會(huì)給你這種體感感覺(jué)。
上圖1顯示的是一個(gè)標(biāo)準(zhǔn)的超聲波雷達(dá)組件,不含配套連接線纜。非正式消息顯示Valeo的超聲波雷達(dá)技術(shù)是Tesla的原始組件供貨商,外觀上確實(shí)很像。而且ebay.com上也提供法雷奧的超聲波雷達(dá)組件給Tesla車主,提供車主DIY修復(fù)超聲波配件的選擇。要知道這個(gè)單個(gè)雷達(dá)組件在ebay.com的公開(kāi)售價(jià)也只有40美金(小編:成本大約是8美金一個(gè),不包含配套線纜和安裝件)。而按照Tesla車輛慣常的維修體系,能換則換的原則,連同Bumper擋板,報(bào)價(jià)至少1000美金。

圖二【Tesla Ultrasonic and vision-2.png】來(lái)自Teslamotorsclub.com插圖節(jié)選,取自URL:https://teslamotorsclub.com/tmc/threads/experience-with-ultrasonic-sensor-repairs.168522/;
上圖2所顯示的就是事故中局部受損的Model 3前Bumper和殃及的兩部超聲波雷達(dá)。如果前bumper可以重新噴漆處理,那么自己動(dòng)手更換這兩部超聲波雷達(dá)顯然是普通人車主更好的選擇。下圖3所顯示的是一個(gè)從紅色Model 3車身上拆下來(lái)的超聲波雷達(dá),上表面為紅色涂裝,是為了適配紅色車身。現(xiàn)在不清楚的是,一部車上共12部超聲波雷達(dá)在性能上是否有所區(qū)分,但顏色上的區(qū)分和具體的產(chǎn)品代號(hào)是聯(lián)系到一起的,共5種5個(gè)顏色。跨越車型Model 3 Y X S不會(huì)有所區(qū)別。
下圖4顯示了在Bumper背部(里側(cè))的超聲波雷達(dá)安裝方式和連接線纜的局部細(xì)節(jié)圖。

圖四【Tesla Ultrasonic and vision-4.png】來(lái)自youtube.com上頻道Munro Live的視頻截圖,取自URL:https://www.youtube.com/watch?v=LS3Vk0NPFDE;
超聲波雷達(dá)主要用在自動(dòng)泊車和停車輔助場(chǎng)景上,分類的話可以分為APA和UPA兩種。
* APA超聲波雷達(dá),全稱Automatic Parking Assistance,是安裝在汽車前后兩側(cè)的側(cè)面,一共四個(gè),主要是是用來(lái)檢測(cè)障礙物的距離。它的探測(cè)距離一般是在30-500cm內(nèi),不過(guò)由于頻率低(參考頻率為48KHz),精度一般;
APA的主要目標(biāo)還是用于在較大的范圍內(nèi),比如5m左右可以發(fā)現(xiàn)可用車位。雖然APA的精度一般,但一個(gè)是足夠使用,另一個(gè)是其聲波波束指向性較好,且不容易對(duì)其它UPA產(chǎn)生干擾,可以同時(shí)工作;
* UPA超聲波雷達(dá),全稱Ultrasonic Parking Assistance,是安裝在前后保險(xiǎn)杠上,前后各有4個(gè),一共八個(gè),主要用于測(cè)量與前后方向障礙物的距離,其探測(cè)距離15-250cm內(nèi),但是頻率就比較高了(參考頻率為55KHz),波長(zhǎng)短則精度就高;
UPA是提供當(dāng)車輛進(jìn)入目標(biāo)空車位時(shí),對(duì)于前后左右障礙物和車輛的距離測(cè)量,從而可以在車輛前進(jìn)和后退的方向上,構(gòu)成高精度的識(shí)別結(jié)果,甚至可以某種程度勾勒障礙物的大致形狀。
從上圖3和圖4的細(xì)節(jié)展示來(lái)看,從超聲波雷達(dá)單元的外觀上,較難發(fā)現(xiàn)Tesla是否采用了APA和UPA的差異化部署,從超聲波雷達(dá)的安裝位置上看,大概率是,但沒(méi)有證據(jù)。Ultrasonic的APA和UPA的工作協(xié)調(diào)性,可以參考如下視頻:
Autopilot系統(tǒng)對(duì)于USS超聲波的呈現(xiàn)
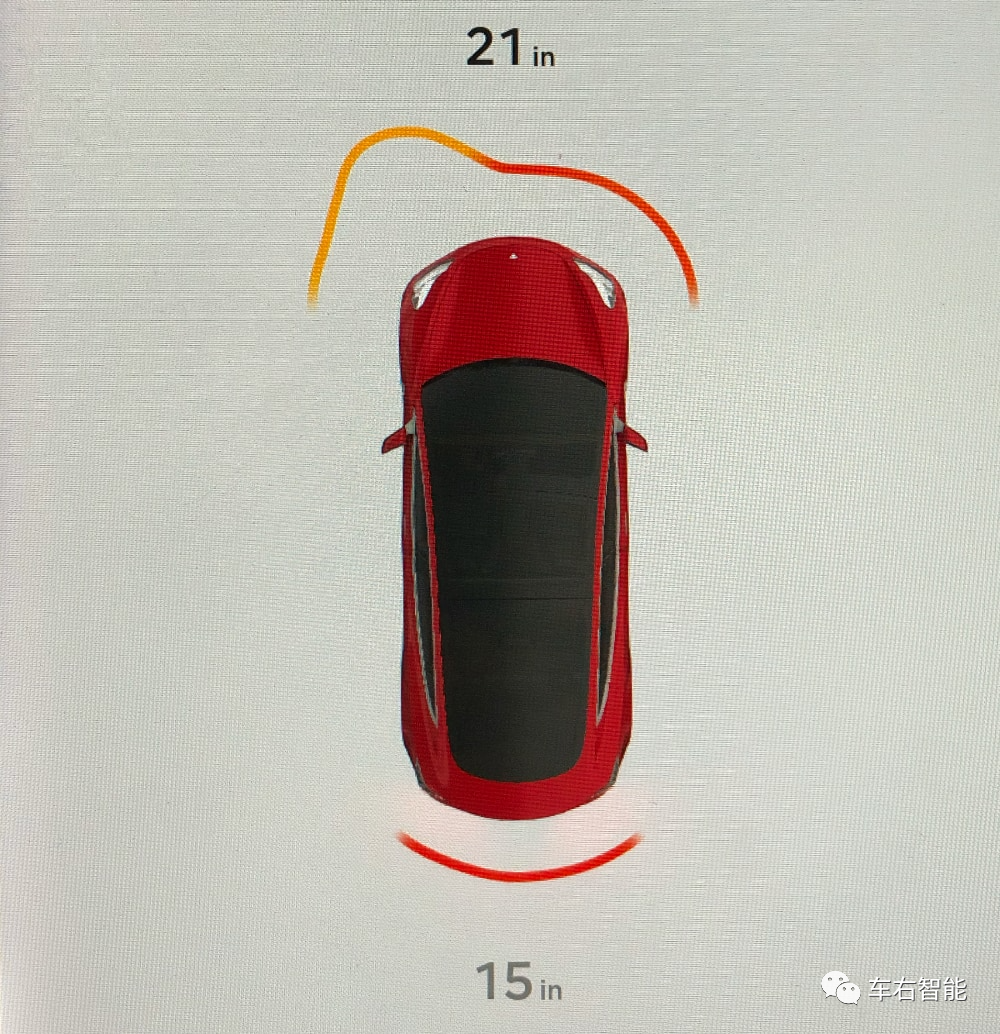
在Autopilot系統(tǒng)當(dāng)中,泊車場(chǎng)景下可以提供完美的泊車效果顯示。在從地平面起的1.5m-2m高度,前后從車頭bumper和車尾bumper起的2.5m的立體范圍以內(nèi),只要這個(gè)12個(gè)USS正常工作,就沒(méi)有感知死角。在有家庭車庫(kù)的條件下,這種精確到十厘米級(jí)別(inch英寸級(jí)別)的感知,可以帶給車主足夠的泊車安全感。
圖六【Tesla Ultrasonic and vision-6.png】來(lái)自notateslaapp..com的技術(shù)文章插圖截圖,取自URL:https://www.notateslaapp.com/software-updates/upcoming-features/id/567/tesla-to-improve-parking-chimes-with-directional-sound;
上圖6展示出了Tesla的UPA(前后各4個(gè))超聲波雷達(dá),所能勾勒出的細(xì)致的模擬車位空間限位俯視圖。其中頭部最近距離為21in/53cm,車尾部最近距離為15in/38cm,進(jìn)入紅色告警狀態(tài)。其中的頭部限位空間在左上角呈現(xiàn)出寬松的測(cè)量結(jié)果,然后被擬合成一根復(fù)合的曲線,有句剛句,美學(xué)上看這個(gè)動(dòng)畫(huà)呈現(xiàn)直觀、表達(dá)真實(shí)性和可視化(動(dòng)畫(huà)效果)都做得很好。
在車輛的行駛場(chǎng)景中,目前沒(méi)有明確的線索顯示Ultrasonic超聲波感知機(jī)制是否直接參與Autopilot框架下的各種自動(dòng)化操作,比如車道保持LKA等典型的Level-2操作等。但從過(guò)往持續(xù)對(duì)于Autopilot版本升級(jí)時(shí)的各種測(cè)試視頻來(lái)看,USS超聲波雷達(dá)其中的APA—位于前后左右四個(gè)側(cè)向角度的長(zhǎng)程超聲波雷達(dá)會(huì)在高速行駛過(guò)程中,持續(xù)工作并至少在Autopilot車內(nèi)中控UI上顯示檢測(cè)反饋,如下圖:

圖七【Tesla Ultrasonic and vision-7.png】來(lái)自teslamotorsclub.com的技術(shù)問(wèn)答插圖截圖,取自URL:https://teslamotorsclub.com/tmc/threads/yellow-arc-line-meaning.220361/;
在車輛行駛狀態(tài)下,5米范圍內(nèi)路邊的各種障礙物超聲回波,將會(huì)導(dǎo)致探測(cè)結(jié)果顯示在Autopilot的中控屏幕上:當(dāng)距離較遠(yuǎn)時(shí)為灰色弧線,距離中等時(shí)為黃色弧線,距離靠近時(shí)為紅色弧線。上圖6顯示道路旁的一般性障礙物,類似較高的隔離欄、路邊的垃圾桶和各種雜草和樹(shù)木,都會(huì)引發(fā)超聲波回波。
Autopilot系統(tǒng)對(duì)于USS超聲波的利用
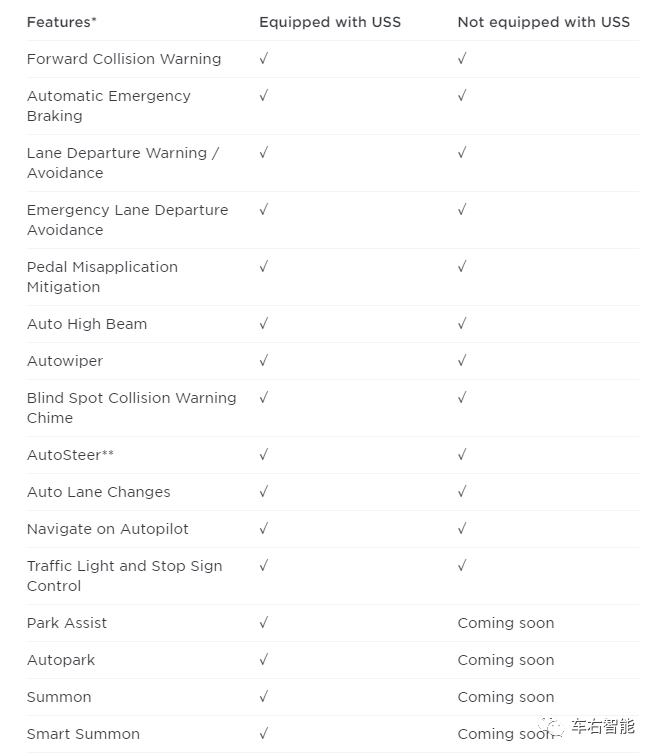
根據(jù)另外一些來(lái)自消費(fèi)者的非正式消息,早期當(dāng)Tesla車輛上的USS超聲波傳感器故障(遭遇車禍部分失效)的前提下,Autopilot的車道偏離輔助功能/Lane Departureassist因持續(xù)告警而無(wú)法使用,系統(tǒng)提示必須人類司機(jī)接管。但從Tesla本次取消USS傳感器所發(fā)布的官方聲明來(lái)看,除了泊車所涉及的具體功能之外,例如summon和auto park,一切Autopilot和Security,甚至FSD的功能都不受限制,如下:
圖八【Tesla Ultrasonic and vision-8.png】來(lái)自tesla.com官方網(wǎng)站的信息發(fā)布截圖,取自URL:https://www.tesla.com/support/transitioning-tesla-vision;
上圖8可以看到第三行中,Lane Departure Warning/Avoidance功能并不和USS超聲波傳感感知能力掛鉤,并且除了最后四項(xiàng)和Park泊車直接相關(guān)的功能受到取消USS的影響之外,所有的Autopilot和FSD的功能都已經(jīng)和USS感知能力脫鉤。Tesla Vision自從一年半前取消mmRadar之后,確實(shí)已經(jīng)在正常的道路行駛過(guò)程中,轉(zhuǎn)向完全依賴Tesla Vision能力了。
與此形成鮮明對(duì)照的是,我們看到除Tesla之外的其它輔助駕駛系統(tǒng)和自動(dòng)駕駛系統(tǒng)功能提供商眼中,USS因?yàn)槠涓呔葴y(cè)量能力和低成本而令其重要性與日俱增,早已不是最早引用USS上車時(shí)侯僅用于倒車環(huán)境的“倒車?yán)走_(dá)”了。在AEB自動(dòng)緊急制動(dòng)功能、FCW前方碰撞預(yù)警功能、LCA變道輔助系統(tǒng)和ACC自適應(yīng)續(xù)航控制系統(tǒng)的應(yīng)用場(chǎng)景中,USS提供感知結(jié)果。
南轅北轍。
放棄USS給Tesla帶來(lái)的收益
Youtube上有一個(gè)長(zhǎng)期研究Tesla車輛結(jié)構(gòu)和成本的機(jī)械博主,@Muro Live,通過(guò)他(Mike Lane)的計(jì)算:Tesla的每輛車都有12個(gè)USS,估計(jì)成本為8美元,總計(jì)96美元。用于零件和安裝的熱鉚支架每個(gè)估計(jì)0.15美元,總計(jì)1.80美元。儀表板線傳感器線束估計(jì)每個(gè)花費(fèi)2.20美元,兩個(gè)總計(jì)4.40美元。對(duì)于內(nèi)部的接線連接器,Tesla使用了兩個(gè),每個(gè)估計(jì)成本為0.40美元,總計(jì)0.80美元。他還為儀表板和車身線束使用布線和連接器,估計(jì)價(jià)格為0.50美元,總計(jì)1美元。Tesla還使用了兩個(gè)集成電路,估計(jì)每個(gè)成本為5美元。
以上求和,每輛車的總金額為114美元。
如果我們按照明年起Tesla的年出貨量可以達(dá)到200萬(wàn)臺(tái)來(lái)估算,僅放棄USS傳感器一項(xiàng),Tesla一年就可以節(jié)省2.3億美金!這筆錢如果用于雇傭Vision Technology工程師,以年薪50萬(wàn)美金計(jì),可以請(qǐng)456位高手。
Occupancy Network能否提供低速高精度測(cè)量
10月份取消USS的官方消息發(fā)布以來(lái),小編看到了Tesla歷史上最大的爭(zhēng)議,來(lái)自于Tesla車主和汽車技術(shù)的從業(yè)者、愛(ài)好者。上次兩年前取消mmRadar的時(shí)候,沒(méi)有這么多的爭(zhēng)議。
著名的Tesla黑客@Green說(shuō),新發(fā)布并開(kāi)始推送的Tesla2022.40.4軟件版本中,對(duì)于那些沒(méi)有裝備USS的2023新款Model 3和Y,Tesla將會(huì)嘗試使用Autopilot中的Vision技術(shù)來(lái)提供泊車場(chǎng)景中所需要的障礙物距離測(cè)量。但截至目前我們看到各種客戶上報(bào)的2022.40.4的測(cè)試視頻中顯示,2023新款Model 3和Y在泊車場(chǎng)景中,系統(tǒng)中控UI沒(méi)有提供前后障礙物的距離信息。消費(fèi)者的爭(zhēng)議必然將長(zhǎng)期存在,直到Tesla真正可以實(shí)現(xiàn)用Tesla Vision技術(shù)完整替代USS,并保證擁有足夠的測(cè)量精度(inch級(jí)別)。任何人類司機(jī)都可以想象,在擁擠的慢速行駛場(chǎng)景中,在復(fù)雜的停車場(chǎng)障礙物叢生的狀態(tài)下,在狹窄路面的掉頭操作中,人類司機(jī)如果無(wú)法掌控位于車頭和車位的障礙物信息,將會(huì)是一件多么諷刺的技術(shù)倒退。
理論上唯一的技術(shù)指望是OccupancyNetwork。
圖九【Tesla ultrasonic and vision-9.png】來(lái)自Tesla AI Day2022視頻節(jié)選(B站搬運(yùn)),取自URL:https://www.bilibili.com/video/BV1Jt4y1w71g/?spm_id_from=333.337.search-card.all.click&vd_source=63bc5d16d5cce41ceadd0a0baf84eefc ;
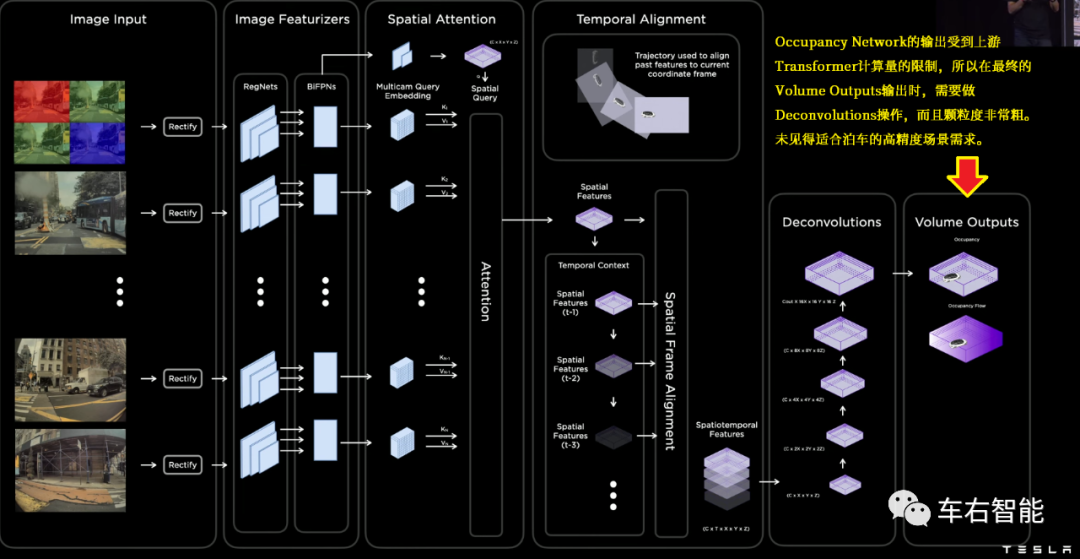
關(guān)于OccupancyNetwork的技術(shù)解讀已經(jīng)汗牛充棟了,小編就不羅嗦了。我們只關(guān)注視覺(jué)技術(shù)是否真的能夠提供足夠高精度的低速場(chǎng)景定位,從而具備替代USS的可能性。參考上圖9,是在AI Day2022上較為完整的Occupancy Network的結(jié)構(gòu),基本可以理解為在ResNet提取圖像特征feature之后,Transformer將依據(jù)不同級(jí)別的特征圖來(lái)實(shí)現(xiàn)BEV轉(zhuǎn)換,并且這個(gè)轉(zhuǎn)換是在3D空間內(nèi)進(jìn)行查詢的,所以我們可以得到一個(gè)定義好Voxel尺寸(即單元voxel體素尺寸)的3D BEV——如果這個(gè)3D Voxel的BEV輸出再聯(lián)系上時(shí)間尺度,就是一個(gè)流動(dòng)的3D Voxel場(chǎng),參見(jiàn)上圖中的Volume Outputs。
框架OccupancyNetwork的核心要義還是TransformerNetwork,它利用注意力機(jī)制發(fā)現(xiàn)在8個(gè)攝像頭投影視場(chǎng)中的feature之間的關(guān)系,并最終將這種關(guān)系以最低損失轉(zhuǎn)移到BEV俯視圖,或者Occupancy Network所需要的3D場(chǎng)。這里需要考慮的是,Transformer雖然性能一流,但是計(jì)算量會(huì)非常大。這是提前定義Voxel體素尺寸的主要原因——犧牲分辨率,提高實(shí)時(shí)性。這也是一種性能和算力之間的平衡,夠用就好。
但當(dāng)Tesla將Occupancy Networks應(yīng)用到停車、泊車、錯(cuò)車、掉頭等對(duì)于操控精度要求很高的低速場(chǎng)景時(shí),因?yàn)橥瑫r(shí)面對(duì)低速度和高精度的需求,那么就需要在現(xiàn)有Voxel的精度上再進(jìn)一步,以便達(dá)到很多場(chǎng)合下估算碰撞尺度的inch英寸精度。

圖十【Tesla ultrasonic and vision-11.png】來(lái)自twitter賬戶@Jasonfenske13的推文,取自URL:https://twitter.com/jasonfenske13/status/1586084382733135874/photo/1;
上圖10顯示,Model 3倒車入庫(kù),由于雨水澆濕了后視攝像頭,導(dǎo)致視覺(jué)倒車影像模糊,但因?yàn)镸odel 3配備USS,從而可以精準(zhǔn)估計(jì)車尾距離車庫(kù)墻壁的距離。

圖十一【Tesla ultrasonic and vision-12.png】來(lái)自ebay商家販?zhǔn)踀ltrasonic Parking Sensor的廣告截圖,取自URL:https://www.ebay.ie/itm/STRIKER-Ultrasonic-Parking-Sensor-for-Home-Garage-Car-Carport-Storage-Shed-/282109121887;
因?yàn)榧彝ボ噹?kù)往往尺寸有限,對(duì)于車輛長(zhǎng)度的警示在老款車輛上(沒(méi)有前向USS傳感器)的解決方案是外掛墻壁市的超聲波傳感器,最低距離可以達(dá)到6inch,提供給駕駛員視覺(jué)警示信號(hào)。由此可見(jiàn)不論是正向還是反向倒車進(jìn)入車庫(kù),都需要高精度的測(cè)距工具。Tesla Vision為基礎(chǔ)的Occupancy Network的解決方案是如何的呢?
圖十二【Tesla ultrasonic and vision-10.png】來(lái)自Tesla AI Day2022視頻節(jié)選(B站搬運(yùn)),取自URL:https://www.bilibili.com/video/BV1Jt4y1w71g/?spm_id_from=333.337.search-card.all.click&vd_source=63bc5d16d5cce41ceadd0a0baf84eefc ;
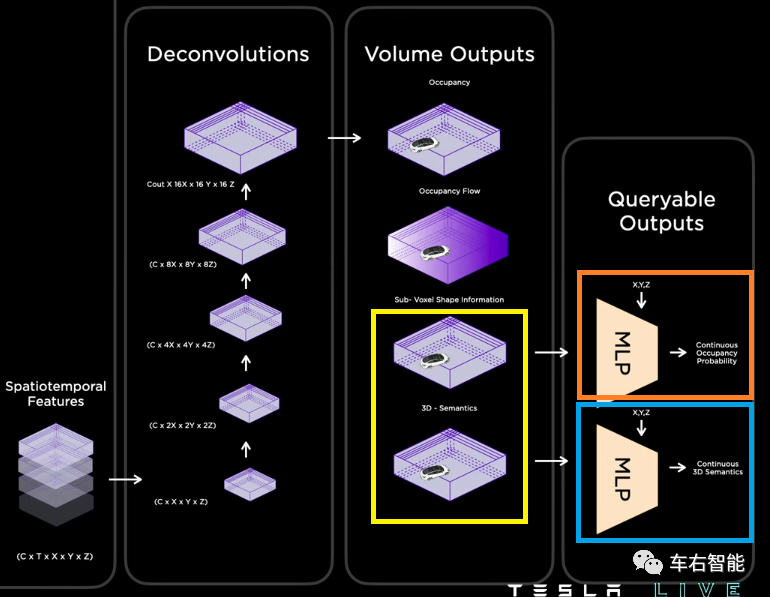
上圖12是在今年AI Day上那位華人小哥(Phil Duan)所介紹的,是圖9的后續(xù)細(xì)節(jié)的進(jìn)一步闡釋,專門針對(duì)OccupancyNetworks精度不夠的場(chǎng)景。Phil的現(xiàn)場(chǎng)闡述很簡(jiǎn)單,一句話帶過(guò),“Occupancy輸出流是有固定尺寸的Voxel立方體網(wǎng)格組成的,在一些控制和規(guī)劃的場(chǎng)景下,這個(gè)固定尺寸Voxel構(gòu)成的外部環(huán)境可能在精度上無(wú)法滿足使用要求。為了獲取更高精度的Occupancy輸出格式,我們需要針對(duì)每個(gè)感興趣的Output上的Voxel進(jìn)行進(jìn)一步的處理,將其輸入到MLP多層感知機(jī)上,然后在更細(xì)的顆粒度上查詢Voxel內(nèi)部的細(xì)節(jié),從而了解其精確的位置和語(yǔ)義信息。”我們?cè)趫D12中就可以看到兩個(gè)各自獨(dú)立的MLP會(huì)對(duì)Occupancy的Output進(jìn)行更細(xì)的占用probability查詢(確定在更細(xì)的位置上是否有物體存在),同時(shí)對(duì)占用的部分進(jìn)行更細(xì)的語(yǔ)義分類。
我們可以大致可以推測(cè)如下場(chǎng)景:當(dāng)車輛進(jìn)入狹窄車庫(kù)并逐漸貼近后墻壁時(shí),后墻上存在一個(gè)小尺寸的車輛充電器機(jī)械掛鉤。在一定距離下,攝像頭所捕獲的標(biāo)準(zhǔn)尺寸的Occupancy Voxel下被處理為一個(gè)大立方體(小編:意味著這個(gè)立方體Voxel內(nèi)部整體完全被占用的可能性很高)從而阻止車輛進(jìn)一步靠近墻壁合理利用有限空間。但如果車輛本體此時(shí)運(yùn)動(dòng)速度很低,車輛就有足夠的算力去進(jìn)一步計(jì)算這個(gè)大立方體Voxel內(nèi)部細(xì)節(jié)到底是什么——通過(guò)隨著攝像頭傳感器的不斷對(duì)于障礙物的抵近觀察,Voxel的細(xì)節(jié)也會(huì)越來(lái)越豐富,從而有可能展示哪些真的有不可碰撞的障礙物實(shí)體,哪些觀察到的Voxel粗顆粒度,在更細(xì)的細(xì)節(jié)上實(shí)際是空白區(qū)域可以讓車輛進(jìn)一步抵近墻壁。
所以除了Tesla車輛所固有的前向攝像頭觀測(cè)死角問(wèn)題,Voxel的觀測(cè)顆粒度問(wèn)題是另外一個(gè)在泊車場(chǎng)景下所必須解決的問(wèn)題。AI Day上Phil講Occupancy Networks的時(shí)效性為10ms,意味著1s提供100幀Occupancy Flow。假設(shè)在更高精度上的Occupancy不會(huì)導(dǎo)致時(shí)效性大幅度下降,Tesla Vision確實(shí)有具備完整替代Ultrasonics的潛力。
果斷拆除USS是個(gè)好方法嗎?
Tesla歷來(lái)特立獨(dú)行,這是產(chǎn)品屬性(小編:已經(jīng)不是嚴(yán)格傳統(tǒng)意義上的車輛產(chǎn)品了)和公司屬性(小編:尤其創(chuàng)始人屬性)所共同決定的。截止目前看,市場(chǎng)的總反饋是積極的,不論是消費(fèi)市場(chǎng)還是資本市場(chǎng),但也有雜音。
快速在指定型號(hào)更新周期——Tesla2023款上,拆除一個(gè)必要的傳感器,確實(shí)是驚人之舉。為啥說(shuō)是“必要的”傳感器呢?因?yàn)榧幢鉚esla自己,也不能立刻提供替代USS傳感器的Vision能力,而是讓客戶等待后續(xù)軟件升級(jí)。這種操作相當(dāng)于突然在產(chǎn)品演進(jìn)過(guò)程中開(kāi)了局部倒車,潛臺(tái)詞是,“相信我,未來(lái)總會(huì)把功能給你補(bǔ)上,現(xiàn)在請(qǐng)接受一個(gè)減配版本吧!”(小編:注意,這還特別是一個(gè)關(guān)鍵的傳感器,在某些場(chǎng)景下這種能力具備不可替代性)
迄今為止,小編所觀察到的市場(chǎng)反饋一如既往:大家都罵,然后大家繼續(xù)買。所以,從Tesla的角度來(lái)看,這是個(gè)好方法嗎?!
==卷尾語(yǔ)===================
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2552文章
51382瀏覽量
755846 -
Tesla
+關(guān)注
關(guān)注
0文章
130瀏覽量
15700 -
USS
+關(guān)注
關(guān)注
1文章
19瀏覽量
11244
原文標(biāo)題:悶頭走到黑,Tesla與全世界逆行—— 取消超聲波傳感器,Tesla Vision終于完滿了嗎?
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
超聲波風(fēng)速風(fēng)向傳感器:科技與自然風(fēng)的對(duì)話者!
倍加福發(fā)布USi-industry超聲波傳感器系統(tǒng)
超聲波液位計(jì)的工作原理 超聲波液位計(jì)與其他液位計(jì)的比較
典型的超聲波傳感器及其應(yīng)用領(lǐng)域
超聲波傳感器是模擬還是數(shù)字
超聲波傳感器輸出的是什么信號(hào)
能否推薦一個(gè)用于放大超聲波傳感器信號(hào)的放大器?
超聲波傳感器的工作原理解析
單片機(jī)如何使用超聲波傳感器進(jìn)行距離測(cè)量
解讀工業(yè)機(jī)器人避障常用的視覺(jué)傳感器、激光傳感器、紅外傳感器、超聲波傳感器

超聲波傳感器的工作原理 超聲波傳感器的聲波頻率是多少
超聲波傳感器的工作模式有哪些
超聲波液位傳感器的工作原理 超聲波液位傳感器型號(hào)
超聲波傳感器形成超聲波的原理
超聲波傳感器和超聲波測(cè)距原理分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論