 如何利用紫外激光加工技術制造可拉伸的多傳感器陣列
如何利用紫外激光加工技術制造可拉伸的多傳感器陣列
近年來,軟體機器人領域取得了巨大的進展。尤其是軟體機器人手已被證明可以抓取甚至操縱形狀復雜、易碎或易變形的物體,解決了傳統的剛性機器人長期面臨的挑戰。基于這些功能,軟體機器人已成為工業、人機交互和醫療應用的理想解決方案。然而,由于缺乏合適的傳感系統,它們的性能受到一定阻礙。因此,開發用于軟體機器人手的傳感器仍然是關鍵一環。
用于軟體機器人手的傳感器網絡需要具備可拉伸性和柔性,能夠貼合柔軟表面并隨其移動,并且傳感器信號不受應變影響。雖然柔性傳感器網絡研究近期已取得一定進展,但在制造成本、復雜性、定制化需求以及傳感器集成等方面,仍存在較大挑戰。此外,為了避免污染,食品處理和人機交互等應用還對傳感器提出了易于更換(最好是一次性)的要求。
據麥姆斯咨詢報道,近期,斯坦福大學(Stanford University)、國立首爾大學(Seoul National University)的研究人員提出一種柔性、可拉伸的多模態傳感器網絡,可與軟體機器人手集成。該傳感器網絡制造和集成復雜性較低,成本接近于一次性用品,并且易于更換。該項工作中,研究人員展示了如何利用紫外激光加工技術來制造可拉伸的多傳感器陣列,從而解決軟體機器人和假肢應用等問題。相關研究成果已發表于npj Flexible Electronics期刊。
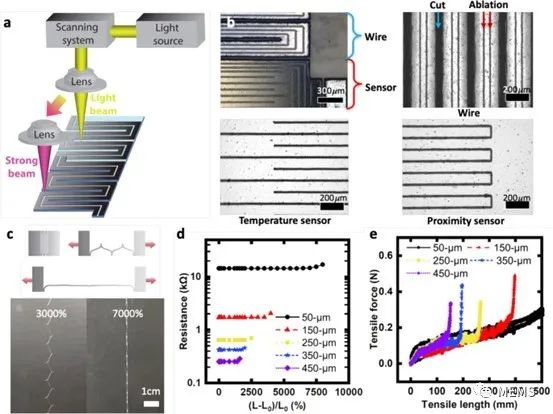
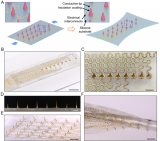
研究人員使用金屬化塑料薄膜,通過紫外激光進行圖案繪制和切割加工,實現低成本制備可拉伸的傳感器網絡。基于該設計加工策略,3分鐘內可以在50 × 50 mm的傳感器網絡上制造多個傳感器和線束,金屬化塑料薄膜的成本僅為0.005美元。通過改變光束參數(功率、頻率、占空比、速度),可以在柔性導電薄膜的每個金屬和塑料層上繪制不同的特征。通過拉伸切割圖案,可以將其包裹在各種形狀的商用軟體機器人表面上,輕松實現集成。通過修改模式尺寸,可以針對具有不同動態范圍、空間分辨率和傳感元件的不同應用進行縮放和定制。
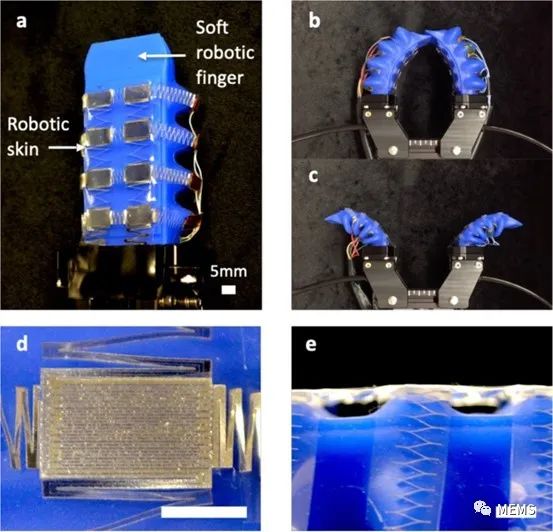
基于此,研究人員制備了機器人皮膚,它由可拉伸Kirigami線跡連接的傳感器組成,嵌入在透明、柔軟且可拉伸的硅膠表皮中,然后被拉伸包裹在柔軟的機器人手指上,當手指彎曲和伸展時都不會出現褶皺。該項研究中展示的傳感器網絡由4個溫度傳感器、4個接近感器組成,通過互連提供8個信號和2根接地線連接到機器人手指背部。
集成激光加工的Kirigami傳感器網絡的軟體機器人手
傳感器網絡的制造和表征
通過將傳感器網絡包裹在軟體機器人手上,研究人員展示了其用于食物處理和醫療應用的可行性。接近傳感器用于在不接觸物體的情況下檢測正在靠近的物體,從而避免物體磨損或損壞。在食物處理實驗中,當接近感應顯示軟夾持器接觸時,它會停止抓取并保持在當前位置,同時溫度傳感器開始測量溫度。此外,接近和溫度傳感的結合對于軟體機器人與人類交互時非常有用,它能夠使機器人對人進行溫和接觸,并能區分生命體的和非生命體表面,甚至可以檢查體溫是否升高。
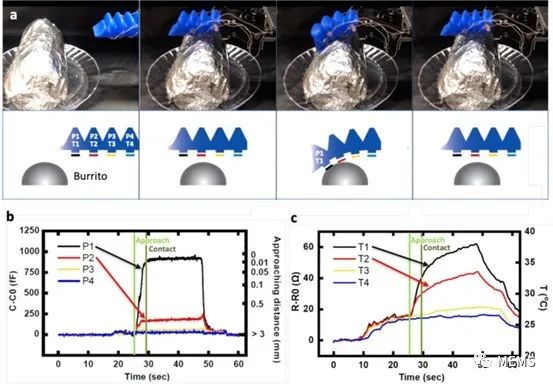
使用接近和溫度傳感的食品處理演示
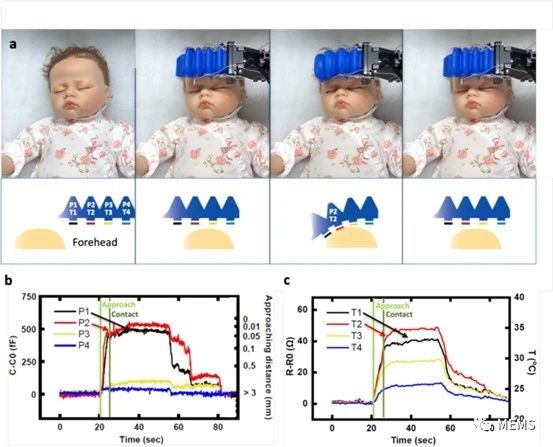
軟體機器人的人機交互演示
研究人員稱,未來計劃在傳感器網絡中集成更多其他類型的傳感器,例如,原位制造的應變傳感器用于本體感知,采用微結構電介質的邊緣場傳感器用于實現接近和壓力組合傳感。此外,為薄膜添加XY載物臺或進紙輥,將允許激光繪制并切割更大的區域。例如,一個由10 × 20個傳感器和線束組成的陣列,在未展開狀態下為155 × 200 mm,展開后可以擴展覆蓋到一個520 × 1640 mm的軟體機器人手臂表面。相關研究將推動軟體機器人在更多場景發揮重要作用。
審核編輯:郭婷
-
傳感器
+關注
關注
2552文章
51382瀏覽量
755848 -
機器人
+關注
關注
211文章
28632瀏覽量
208012 -
激光
+關注
關注
19文章
3249瀏覽量
64736
原文標題:紫外激光加工的可拉伸多模態傳感器網絡,用于軟體機器人交互控制
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
汽車發動機傳感器焊接加工采用激光焊錫技術
北海道大學:基于ZnO納米粒子激光誘導石墨烯的超靈敏可拉伸應變傳感器
激光測距傳感器輸出什么信號
激光測距傳感器的工作原理是什么?

基于Arduino的紫外線傳感器設計 紫外線傳感器的工作原理和分類
柔軟可拉伸的新型3D打印材料可改善可穿戴傳感應用
軋輥激光熔覆修復加工技術
一種制造高度可拉伸且可定制化的微針電極陣列的方法






 工商網監
工商網監
評論