 交通信號控制的提升改進方法
交通信號控制的提升改進方法
10月27日,由中國道路交通安全協會主辦、北京易華錄信息技術股份有限公司承辦的“交通緩堵新技術及應用實踐論壇”成功召開,來自公安交通管理部門負責人、國內道路交通管理專家以及業內龍頭企業代表,于“云端”交流了在交通治理、城市緩堵工作中的先進技術和實戰模式,共同探討緩堵治理創新路徑,共同展望智慧交通未來趨勢。
近年來,以視頻、雷視、邊緣融合計算技術為代表的交通感知技術飛速發展,但交通信號控制技術的發展相對緩慢。易華錄數字政府事業群副總裁、智慧交通事業部總經理劉樹青發表主題演講《由感知技術現狀談緩堵控制技術發展》,從當前的交通感知技術為緩堵控制技術帶來的價值出發,探討了基于越來越豐富感知信息的緩堵控制技術發展方向。
以下為演講實錄
本次匯報內容包括三部分。一是當前感知和控制技術的發展情況,二是在當前感知發展技術環境下易華錄交通控制技術的提升思路,三是未來的緩堵控制技術的發展方向。
首先來看一下當前的感知與控制技術的發展情況。
20世紀60年代-21世紀初,感應線圈被用作為車輛檢測器,成為技術成熟、應用廣泛的車輛檢測系統;2007年,在北京快速路最早開始使用地磁技術;2013年,毫米波雷達進入中國市場,國產毫米波雷達快速發展;2017年開始,視頻檢測技術逐漸成為行業的主流檢測技術;2019年邊緣計算技術顯露頭角并發展迅猛;2020年雷視一體機成先進檢測技術的發展趨勢。
從這些檢測技術應用的間隔時間來看,技術迭代速度越來越快。我們來看一下當前幾種主流的檢測技術。
一、視頻檢測
它是基于計算機視覺和圖像處理的交通信息檢測技術,能夠把檢測個體從機動車擴展到非機動車和行人,補充了車牌號等身份特征,增加了基于行駛軌跡和道路環境的個體、群體區域行為檢測信息。
二、雷達檢測
交通檢測目前廣泛采用的是毫米波雷達,它不受光線氣候的影響,可以精準追蹤個體移動,檢測距離是普通供視頻檢測距離的2-3倍,但是毫米波雷達對靜態目標的定位檢測精度較差。目前最先進的雷視融合檢測一體機,把雷達的追蹤定位與視頻的視覺識別相融合,彌補雷達檢測和視頻檢測各自的檢測短板。
三、邊緣計算,是比較先進的感知技術手段。
我們知道,交通領域里也有很多邊緣計算的盒子,以路口為例,這些邊緣計算盒子一般有有四個主要應用場景,即本地交通信號評價優化控制、沖突點識別等交通運行秩序安全監測、基于視頻和雷視監測融合的交通信息采集以及車路協同信息交互。在這些應用場景中,交通邊緣計算技術的一個重要價值體現是對路口感知能力的提升,基于不同數據源提取不同檢測數據,或者基于同一種檢測數據的多源融合處理,獲取更多維度、更準確的路口交通信息感知能力。
以上是交通感知技術的發展和現在三種比較先進的交通感知技術手段。
在信號控制方面,可以把信號控制的歷程劃分為單點信號控制、區域協調信號控制、智能化信號控制、數據驅動信號控制四個階段。前兩者是大家熟知的,智能信號控制可以解釋為從21世紀初到現在,國產信號控制系統的發展,以及比如特勤控制、匝道控制等小控制場景的智能水平提升。數據驅動信號控制的場景,比如實時檢測數據自適應控制,互聯網浮動車大規模軌跡數據驅動的信號控制等。
對比感知技術和控制技術的發展歷程,我們可以看到:感知技術的迭代與控制技術的迭代大周期基本相近,但是,近十年來,感知技術鮮活發展,但控制技術的更進相對較慢。
主要原因有兩個方面。首先,控制是比感知更復雜的供需均衡計算問題,控制理論算法創新提升難度大。其次,近十年交通感知在數據維度的豐富和精確度的提高方面對現有控制體系的正向刺激有限。但這并不是說像雷達、雷視這些先進的感知手段對我們當前的控制體系沒有價值。相反,如何用將這些新增的感知能力應用到緩堵控制里,取得更好的緩堵控制效果,是我們需要下大功夫的地方。
這就是我下面要分享的,易華錄基于從感知到認知的研究,緩堵控制技術的提升思路。
什么是感知?什么是認知?拋開非常嚴謹的關于“感知”與“認知”的學術定義,我認為,感知就是可以直接檢測獲取的信息,認知是感知信息的不斷加工,是知識的持續延伸。
直觀的理解,我們舉一個例子,我們感知到體溫是39°,然后我們會一步步認識到,這個體溫是異常的,當前的健康狀態有問題、需要治療,需要避免二次發生等等。在感知到體溫值之后的所有動作,就是我們對健康醫療知識的逐漸延伸。
再舉一個交通的例子,檢測感知到某一個相位綠燈放行了40秒,通過了3輛小汽車,然后我們可能會進一步認識到綠燈空放嚴重,綠燈時間有浪費,這個路口需要信號配時調整,這個相位之余的其他相位也需要隨之調整,與這個路口相協調的路口也需要信號配時調整。當然,有可能這種綠燈機動車空放是考慮行人通行的必然需要,那這個路口的信號配時是否需要調整,就是另一種思路了。不管是哪種思路,都是我們基于感知信息,利用我們的交通調控的知識,一步一步去推導,最終得出對于這種感知信息,我們需要作出的控制反應。
在當前的感知技術手段下,車輛身份、車輛軌跡等感知信息的獲取,使我們對車輛個體感知能力和區域群體感知能力有很大的提升。基于當前更豐富的感知環境,易華錄建立了面向路網、交通參與者、擁堵原因、交通擾動、交通預測、交通控制的六個維度的認知體系。
爻,交也,是錯綜交雜的意思。交通恰是時間控制、空間控制、參與對象之間的錯綜交雜。所以我們把這個體系命名為六爻認知,對路網、交通參與者、擁堵原因、交通擾動、交通預測的認知,都將最終落腳于對交通控制的認知。
一、路網認知
包括對路網基礎結構、服務設施分布、供給能力、及運行狀態的認知,通過對交通路網的認知,摸清路網供給能力、空間可調控能力和供需均衡情況。
二、對象認知
包括交通對象的出行特征認知和出行規律認知,從交通參與者本身,數清不同類型參與者的不同出行需求和出行規律。
三、堵因認知
包括對交通組織、信控配時、交通行為三種可能交通擁堵原因的認知,揭露交通擁堵問題的根本原因及其內在聯系和規律,復雜擁堵問題主責化。
四、擾動認知
它是常態路網的非常態擾動事件的認知,這包括節假日、交通事故等各種事件因素,以及其時空特征、擾動影響蔓延、消散的認知,對非常態事件,預測其常態趨勢,掌握其常態規律。
五、預測認知
包括對短時和長時內的擁堵事件預測、對交通流參數和特征的預測、對出行需求時空特征的預測,化被動認知為主動認知,精準預知是最高級的主動認知。
六、控制認知
包括對單口、多口和特殊優先的控制,以及對交通組織的控制,認知每種控制模式、每種控制方法、每個控制參數,控制認知是對其他所有認知的最終決斷。
下面挑選了幾個基于六爻認知體系的交通信號控制的提升改進方法展開介紹。
第一,在單路口優化控制方面。
1.自適應控制過程。相比較基于過去一段時間檢測數據和斷面交通流預測數據生成控制方案,依靠多時空維度的交通狀態感知帶來的認知水平的提升,能夠結合上下游路口信號、路段流量分布以及路徑出行分布數據,生成交通流到達認知,基于對路段交通流到達的預測,作出相階切換和相階時長決策,讓自適應控制的適應性更高、方案更優。
2.感應控制過程。傳統控制邏輯是只考慮感應響應效率的感應控制,這種控制機制會忽視路口整體的通行效率。我們在感應觸發的基礎上,增加各方向短時通行需求的預測認知判斷,再決定感控控制的響應機制,這樣能夠有效平衡提升感應通行需求和路口整體通行效率最大化。
第二,在多路口優化控制方面。
1.動態子區劃分過程。子區的劃分多是基于人工經驗的半自動劃分,人工經驗決定了子區劃分的主觀合理性,并且導致子區劃分動態適應性差。我們在這個控制體系里,增加基于機動車出行路徑認知信息的路口間協調需求計算,形成 打破同一條道路約束以及直行協調約束的交通流形成分布動態子區劃分方法。
2.交叉口之間的協調控制過程。增加進口道交通量到達認知和交通流運動過程的認知,可以通過相位差協調、上下游通行能力協調,不僅可以達到更好的子區內綠波控制效果,還可以實現子區之間路網負載均衡緩堵控制效果。
以上是基于當前感知信息,易華錄建立的六爻交通認知體系及其中幾個控制認知算法的改進技術思路。
接下來我們來看一下未來的緩堵控制技術思考。
網聯駕駛應該來說是大概率的一個未來交通場景,在這個場景中,我們設想,因為網聯,我們能夠準確感知到每一輛車、每一個車隊,他們是什么車、是時空位置以及時空通行需求。那么,我們對交通的認知變得足夠簡單,可以通過很簡單的加減乘除計算得在宏觀、中觀、微觀各種顆粒度下的交通供給與交通需求之間的差值,比如這個50米長的車隊,最終會有多少輛能通過前方路口剩余的15秒綠燈。
由此我們的交通控制是否也將更加直接,從控制信號燈,然后間接控制機動車,是否會直接變成控制機動車?我們完全可以由中心通知車輛在幾秒之后停車,幾秒后右轉彎改變路線去目的地。這樣的話,黃燈還有必要嗎?到現在也說不清是相位還是相階的放行組合順序還會是短時段必須固定不變的嗎?如果不是,那我們的交通信號控制體系必然是需要徹底變化的。
這雖然只是一個我個人做的腦洞大開的假設推理,但恰恰說明了交通感知對交通認知和交通控制的影響。
最后,對我今天的分享做三點總結。
第一,感知技術手段在快速迭代,但技術的穩定可靠性仍需努力;
第二,緩堵效果不能只寄希望于“全息”的感知,而應是對時空供需深刻認知后的“控制”;
第三,未來已來,可能是天翻地覆的新世界,緩堵技術研究枯燥又充滿期待!
-
檢測技術
+關注
關注
2文章
357瀏覽量
29117 -
交通信號
+關注
關注
0文章
25瀏覽量
9595 -
邊緣計算
+關注
關注
22文章
3119瀏覽量
49326
原文標題:干貨滿滿|劉樹青:由感知技術現狀談緩堵控制技術發展
文章出處:【微信號:ehualu300212,微信公眾號:易華錄】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
智慧交通對交通的幫助有哪些?
基于FPGA技術的智能交通信號燈控制系統
智慧交通技術的廣泛應用領域
交通監控防浪涌保護器及防雷解決方案

智慧交通信號燈控制系統,計訊工業無線路由器助力城市道路管理

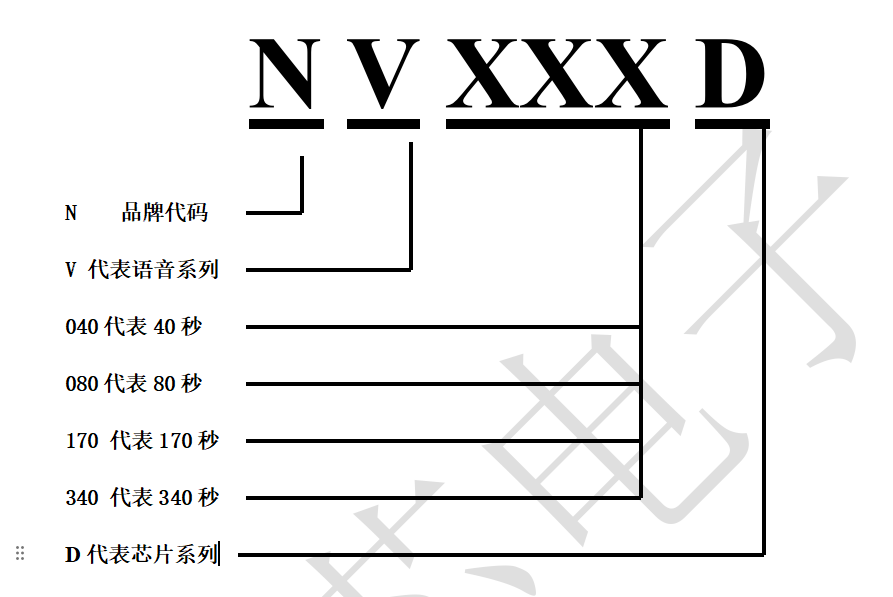
語音IC方案,在交通信號燈語音提示器的應用解析,NV040D

語音IC方案,在交通信號燈語音提示器的應用解析,NV040D
RS485轉Modbus-TCP模塊連接PLC通信步驟

推動智慧交通建設,邊緣計算賦能交通信號燈數據處理與決策能力

發展智慧交通的目的是什么?
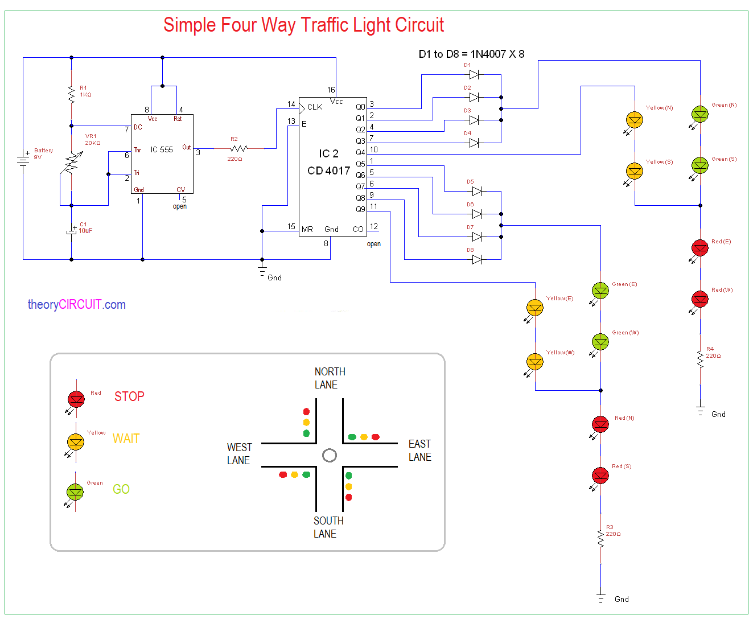
基于555定時器的四路交通燈電路圖
TomTom交通技術支持Miovision交通信號預測和車聯網(V2X) 解決方案系列
智慧交通-助力城市可持續發展

發展智慧交通的目的和意義






 工商網監
工商網監
評論