

?先討論濾波器的概念,濾波的意思是,讓機器人在某個正確位置上對應的概率越高越好。
也就是可以理解為:把錯誤位置上的概率濾低,把正確位置處的概率濾高。
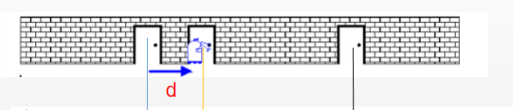
假設一個機器人小R在如下場景中出現,他剛開始不知道自己在哪(小R還沒看到他眼前的門),因此他在這個場景中任何位置的概率是相等的。
如果此時縱坐標為機器人小R在對應位置處的概率,橫坐標表示各個位置,應該是一條均勻分布的直線。

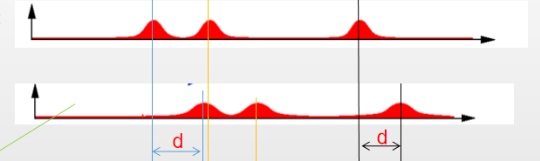
突然,機器人看到了眼前這個門,這里假設機器人提前知道一共有三個門,因此小R現在知道自己可能在任意一個門前,即三個門分別對應著一個正態分布。此時的概率波形可以理解為先驗概率。

小R繼續向前走到第二個門前,他通過自己身上安裝的里程計發現自己走了d個單位。
根據之前的概率分布,小R可以預測到,自己的位置應該向右平移了d個單位。那么可以將之前的概率分布向右平移d個單位,得到此時通過傳感器得到的概率分布。此時的概率波形可以理解為似然概率。
小R突然發現自己看到了第二扇門前,僅根據當前的觀測,小R知道自己在三個門前的概率相同,又可以得到之前的三個正態分布。根據傳感器預測得到的分布和根據先驗信息得到的分布得:

兩個波形信號可以做個卷積融合得到:

這樣小R在第二扇門處(正確位置)的概率就變大了,在其他位置處的概率就變小了,進而達到了濾波的目的。
以上即是普通濾波器的直觀解釋,同樣地,可以類比到卡爾曼濾波上。
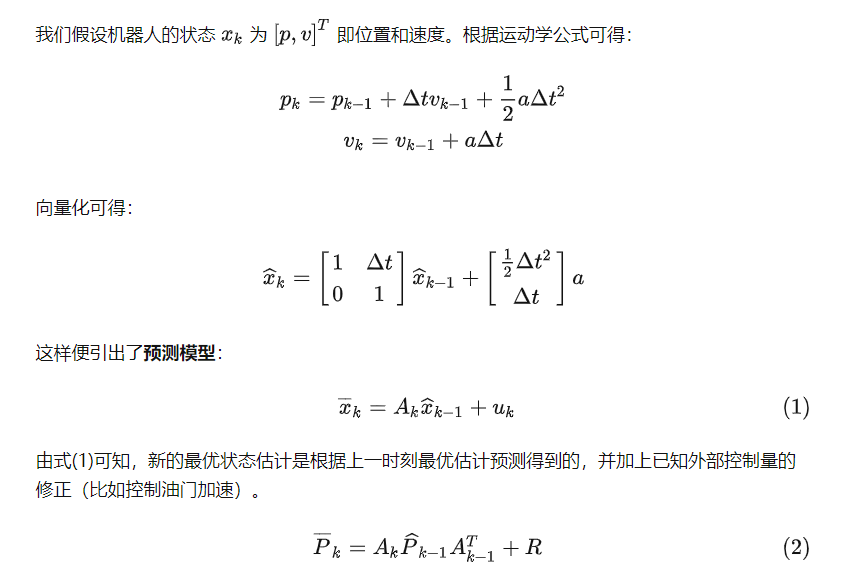
由式(2)可知,新的不確定性由上一時刻不確定性預測得到,并加上外部環境的干擾。
這時我們對系統的變化有了模糊的估計,更新的狀態(均值)和不確定性(協方差)分別如式(1)和(2),預測的過程相當于之前的波形向右平移d個單位的過程。
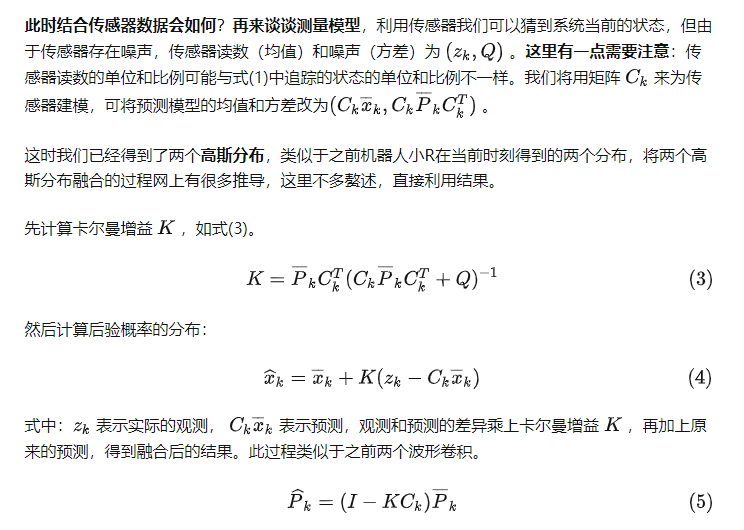
得到的新的最優估計可以放到下一時刻不斷迭代。以上就是經典卡爾曼濾波器的五個公式,給出了線性高斯系統的最優無偏估計。
我們可以用這些公式對任何線性系統建立精確的模型,對于非線性系統來說,我們使用擴展卡爾曼濾波,區別在于EKF多了一個把預測和測量部分進行線性化的過程。
此時再看這個高贊無公式推導的回答來回顧全局,一切豁然開朗
無公式直白解釋卡爾曼濾波:
假設你有兩個傳感器,測的是同一個信號。可是它們每次的讀數都不太一樣,怎么辦?
取平均。
再假設你知道其中貴的那個傳感器應該準一些,便宜的那個應該差一些。那有比取平均更好的辦法嗎?
加權平均。(乘卡爾曼增益 K)
怎么加權?假設兩個傳感器的誤差都符合正態分布,假設你知道這兩個正態分布的方差,用這兩個方差值,(此處省略若干數學公式),你可以得到一個“最優”的權重。
接下來,重點來了:假設你只有一個傳感器,但是你還有一個數學模型(指的是上文中的預測模型)。模型可以幫你算出一個值,但也不是那么準。怎么辦?
把模型算出來的值,和傳感器測出的值,(就像兩個傳感器那樣),取加權平均。
OK,最后一點說明:你的模型其實只是一個步長的,也就是說,知道x(k),我可以求x(k+1)。
問題是x(k)是多少呢?答案:x(k)就是你上一步卡爾曼濾波得到的、所謂加權平均之后的那個、對x在k時刻的最佳估計值。于是迭代也有了。這就是卡爾曼濾波。(無公式)
-
傳感器
+關注
關注
2557文章
51955瀏覽量
760277 -
濾波器
+關注
關注
161文章
7954瀏覽量
180031 -
模型
+關注
關注
1文章
3442瀏覽量
49658
原文標題:SLAM后端優化中卡爾曼濾波的直觀通俗解釋
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
卡爾曼濾波器介紹

如何理解卡爾曼濾波器?卡爾曼濾波器狀態方程及測量方程

卡爾曼濾波器的特性及仿真






 工商網監
工商網監

評論