") 在GD32F310G-START開(kāi)發(fā)板上讀取三軸加速度計(jì)
在GD32F310G-START開(kāi)發(fā)板上讀取三軸加速度計(jì)
我拿到的開(kāi)發(fā)板實(shí)際板載的 MCU 是 GD32F310G8,QFN28pin 封裝,基于 ARM CORTEX M4 內(nèi)核,主頻 72MHz, 芯片內(nèi)置 64KB flash,8KB SRAM, 兩路 I2C 外設(shè)。
整體概述
首先感謝極術(shù)社區(qū)給我試用GD32開(kāi)發(fā)板的機(jī)會(huì),讓我體驗(yàn)一下近幾年國(guó)產(chǎn)MCU開(kāi)發(fā)體驗(yàn)。該芯片是基于arm cortex-M4內(nèi)核,主頻72Mhz,flash 64k,ram 8k,以及豐富的外設(shè)。
本次試用是一個(gè)讀取三軸加速度計(jì)的實(shí)驗(yàn),主要使用的是硬件iic。
硬件連接
傳感器介紹
SC7A20 是一款高精度 12bit 數(shù)字三軸加速度傳感器芯片,內(nèi)置功能 更豐富,功耗更低,體積更小,測(cè)量更精確。
芯片通過(guò) IC2/SPI 接口與 MCU 通信,加速度測(cè)量數(shù)據(jù)以中斷方式或 查詢方式獲取。INT1和INT2中斷管腳提供多種內(nèi)部自動(dòng)檢測(cè)的中斷信號(hào), 適應(yīng)多種運(yùn)動(dòng)檢測(cè)場(chǎng)合,中斷源包括 6D/4D 方向檢測(cè)中斷信號(hào)、自由落體 檢測(cè)中斷信號(hào)、睡眠和喚醒檢測(cè)中斷信號(hào)、單擊和雙擊檢測(cè)中斷信號(hào)。
芯片內(nèi)置高精度校準(zhǔn)模塊,對(duì)傳感器的失調(diào)誤差和增益誤差進(jìn)行精確補(bǔ)償。 ±2G、±4G、±8G 和±16G 四種可調(diào)整的全量程測(cè)量范圍,靈活測(cè)量外 部加速度,輸出數(shù)據(jù)率 1HZ 和 400HZ 間可選。
軟件功能
該軟件主要使用了GD32開(kāi)發(fā)板的硬件iic,外部中斷以及串口,這三部分功能,串口的配置在其他文章的當(dāng)中已經(jīng)有敘述,本文只主要介紹iic和外部中斷的使用.
硬件iic
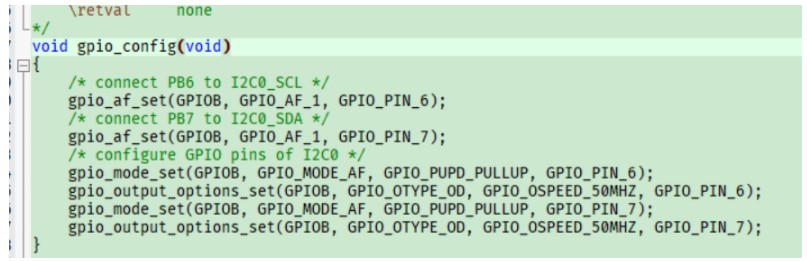
初始化gpio
配置硬件iic
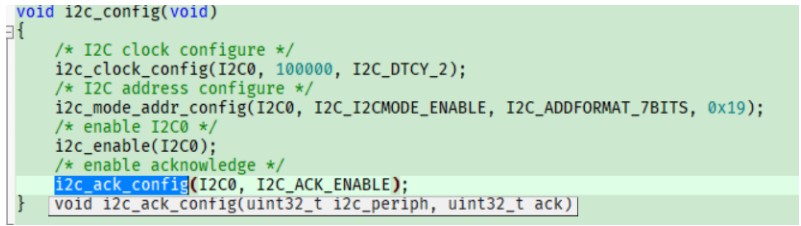
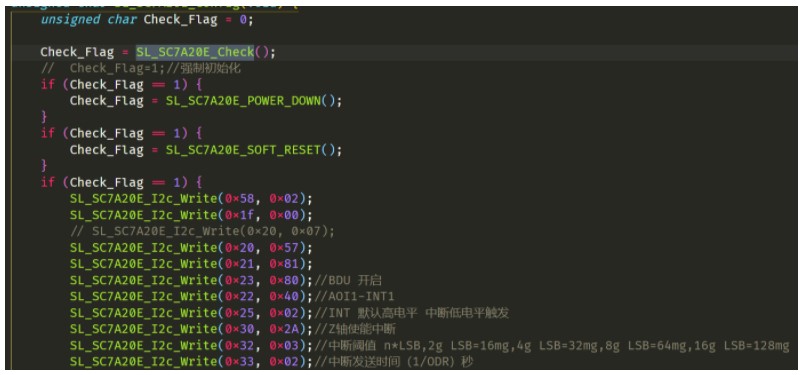
根據(jù)廠商提供的庫(kù)函數(shù)(具體參考gd32f3x0_i2c.c文件),我們可以很容易的初始化iic。剩下的就是對(duì)傳感器進(jìn)行配置了,該傳感器需要配置寄存器較多,廠商直接提供了一份demo程序,只需要適配讀取寫入的接口就可以很快的使用了。
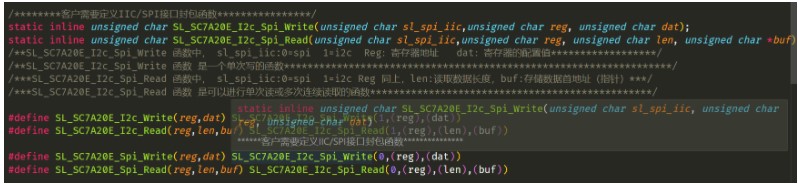
我需要做的就是把iic的讀取和寫入進(jìn)行適配適配函數(shù)如下:
void I2C_LeaderWrite(uint16_t followerAddress, , uint8_t targetAddress, uint8_t *txBuff, uint8_t numBytes) { /* wait until I2C bus is idle */ while (i2c_flag_get(I2C0, I2C_FLAG_I2CBSY)) ; /* send a start condition to I2C bus */ i2c_start_on_bus(I2C0); /* wait until SBSEND bit is set */ while (!i2c_flag_get(I2C0, I2C_FLAG_SBSEND)) ; /* send slave address to I2C bus */ i2c_master_addressing(I2C0, followerAddress, I2C_TRANSMITTER); /* wait until ADDSEND bit is set */ while (!i2c_flag_get(I2C0, I2C_FLAG_ADDSEND)) ; /* clear ADDSEND bit */ i2c_flag_clear(I2C0, I2C_FLAG_ADDSEND); /* wait until the transmit data buffer is empty */ while (!i2c_flag_get(I2C0, I2C_FLAG_TBE)) ; for (i = 0; i < numBytes; i++) { /* data transmission */ i2c_data_transmit(I2C0, txBuff[i]); /* wait until the TBE bit is set */ while (!i2c_flag_get(I2C0, I2C_FLAG_TBE)) ; } /* send a stop condition to I2C bus */ i2c_stop_on_bus(I2C0); /* wait until stop condition generate */ while (I2C_CTL0(I2C0) & 0x0200) ; } void I2C_LeaderRead(uint16_t followerAddress, uint8_t targetAddress, uint8_t *rxBuff, uint8_t numBytes) { /* wait until I2C bus is idle */ while (i2c_flag_get(I2C0, I2C_FLAG_I2CBSY)) ; /* send a start condition to I2C bus */ i2c_start_on_bus(I2C0); /* wait until SBSEND bit is set */ while (!i2c_flag_get(I2C0, I2C_FLAG_SBSEND)) ; /* send slave address to I2C bus */ i2c_master_addressing(I2C0, followerAddress, I2C_TRANSMITTER); /* wait until ADDSEND bit is set */ while (!i2c_flag_get(I2C0, I2C_FLAG_ADDSEND)) ; /* clear the ADDSEND bit */ i2c_flag_clear(I2C0, I2C_FLAG_ADDSEND); /* wait until the transmit data buffer is empty */ while (SET != i2c_flag_get(I2C0, I2C_FLAG_TBE)) ; /* enable I2C0*/ i2c_enable(I2C0); /* send the EEPROM's internal address to write to */ i2c_data_transmit(I2C0, targetAddress); /* wait until BTC bit is set */ while (!i2c_flag_get(I2C0, I2C_FLAG_BTC)) ; /* send a start condition to I2C bus */ i2c_start_on_bus(I2C0); /* wait until SBSEND bit is set */ while (!i2c_flag_get(I2C0, I2C_FLAG_SBSEND)) ; /* send slave address to I2C bus */ i2c_master_addressing(I2C0, followerAddress, I2C_RECEIVER); /* wait until ADDSEND bit is set */ while (!i2c_flag_get(I2C0, I2C_FLAG_ADDSEND)) ; /* clear the ADDSEND bit */ i2c_flag_clear(I2C0, I2C_FLAG_ADDSEND); /* while there is data to be read */ for (int i = 0; i < numBytes; i++) { /* code */ /* read a data from I2C_DATA */ rxBuff[i++] = i2c_data_receive(I2C0); /* send a stop condition */ i2c_stop_on_bus(I2C0); } /* wait until the stop condition is finished */ while (I2C_CTL0(I2C0) & 0x0200) ; /* enable acknowledge */ i2c_ack_config(I2C0, I2C_ACK_ENABLE); i2c_ackpos_config(I2C0, I2C_ACKPOS_CURRENT); }
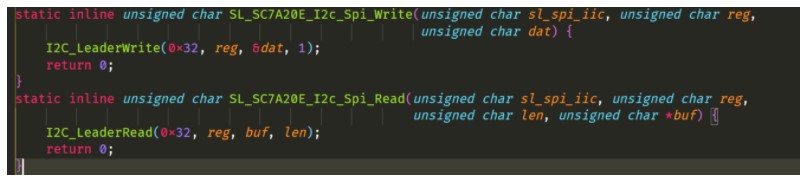
然后把這兩個(gè)函數(shù)適配:
然后對(duì)傳感器進(jìn)行設(shè)置
外部中斷
使用外部中斷可以使用用于喚醒mcu,這對(duì)設(shè)計(jì)低功耗的產(chǎn)品很有意義,當(dāng)傳感器超過(guò)設(shè)定的閾值的時(shí)候,那么就會(huì)產(chǎn)生一個(gè)中斷來(lái)通知mcu,需要進(jìn)一步的處理數(shù)據(jù),外部中斷的配置如下所示:
void exit_wakeup_interrupt_config(void)
{
/* configure the priority group */
nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2);
/* enable the key wakeup clock */
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_CFGCMP);
/* configure button pin as input */
gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_NONE, GPIO_PIN_0);
/* enable and set key wakeup EXTI interrupt to the higher priority */
nvic_irq_enable(EXTI0_1_IRQn, 2U, 0U);
/* connect key wakeup EXTI line to key GPIO pin */
syscfg_exti_line_config(EXTI_SOURCE_GPIOA, EXTI_SOURCE_PIN0);
/* configure key wakeup EXTI line */
exti_init(EXTI_0, EXTI_INTERRUPT, EXTI_TRIG_FALLING);
exti_interrupt_flag_clear(EXTI_0);
}
數(shù)據(jù)處理
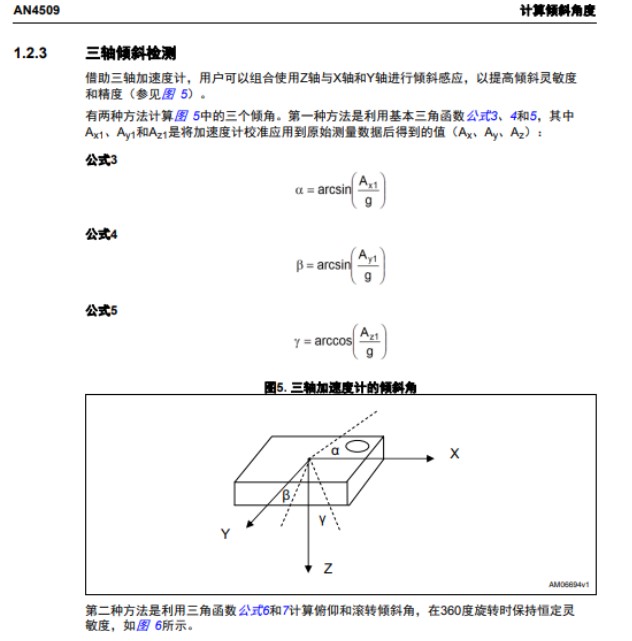
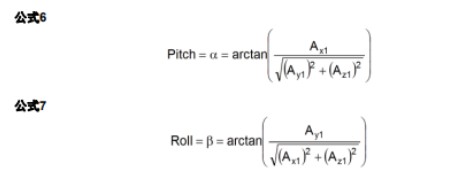
由于我們使用的是三軸傳感器,對(duì)于姿態(tài)位置的計(jì)算并不是很精確,因此,此處只用簡(jiǎn)單角度計(jì)算,傾角的計(jì)算原理如下
計(jì)算代碼如下:
#define DEG_TO_RAD(x) ((x) * 0.01745329252)
#define RAD_TO_DEG(x) ((x) * 57.2957795131)
void angle_calculation() {
double pitch, roll, paw;
pitch = atan(xyz_mg[X] / sqrt(pow(xyz_mg[Y], 2) + pow(xyz_mg[Z], 2)));
roll = atan(xyz_mg[Y] / sqrt(pow(xyz_mg[X], 2) + pow(xyz_mg[Z], 2)));
paw = atan(sqrt(pow(xyz_mg[X], 2) + pow(xyz_mg[Y], 2)) / xyz_mg[Z]);
printf("[RAD]pitch:%.2f | roll:%.2f | paw:%.2f rn", pitch, roll, paw);
printf("[DEG]pitch:%.2f° | roll:%.2f° | paw:%.2f° rn", RAD_TO_DEG(pitch), RAD_TO_DEG(roll),
RAD_TO_DEG(paw));
}
審核編輯:劉清
-
mcu
+關(guān)注
關(guān)注
146文章
17312瀏覽量
352205 -
三軸加速度計(jì)
+關(guān)注
關(guān)注
1文章
29瀏覽量
13370 -
SRAM控制器
+關(guān)注
關(guān)注
0文章
11瀏覽量
5909 -
GD32F3
+關(guān)注
關(guān)注
0文章
11瀏覽量
3859
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于三軸加速度計(jì)的評(píng)估板的設(shè)計(jì)演示
兩軸加速度計(jì)和三軸加速度計(jì)的使用區(qū)別?
請(qǐng)問(wèn)兩軸加速度計(jì)和三軸加速度計(jì)的使用區(qū)別是什么?
加速度計(jì)的技術(shù)規(guī)格詳解
2476-100加速度計(jì)
2460-010加速度計(jì)
基于流行的ADXL335三軸模擬加速度計(jì)
ADXL345 MEMS加速度計(jì)開(kāi)發(fā)板的設(shè)置和使用方法
digilentPmodACL三軸加速度計(jì)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論