 RTOS的系統節拍
RTOS的系統節拍
RTOS的系統節拍
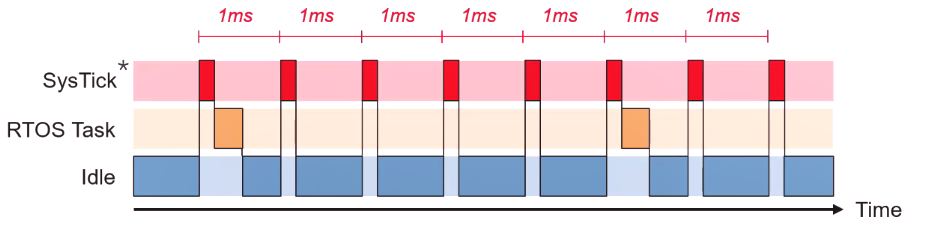
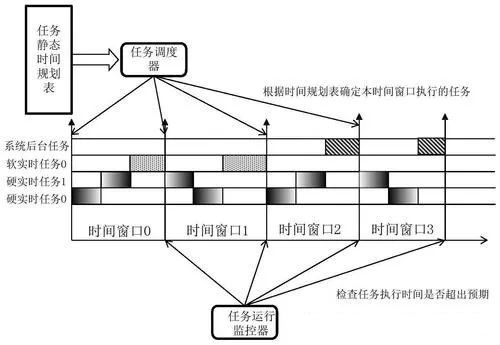
傳統的RTOS都是利用一個硬件定時器產生周期性的節拍中斷,作為系統的時基。在多數的應用中,系統節拍的周期都是毫秒級的,RTOS的超時、延遲、定時的分辨率都是以節拍為單位。即使一個任務在幾個連續的節拍內執行,系統節拍中斷還是會周期性的發生,浪費了CPU的執行時間。下圖是一個示例,雖然某段時間內只有IDLE任務在執行,系統節拍中斷還是會如期發生。
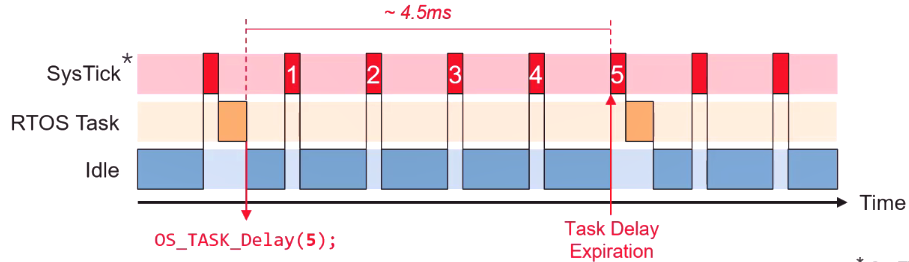
此外,任務延遲或超時等時間相關的功能都基于系統滴答中斷計時,計時時間到后,通過系統節拍周期中斷觸發調度器。因此,如果任務的延遲時間小于一個系統節拍周期,則只能主動等待,直到所需的時間結束。
 ?
?周期級分辨率的RTOS
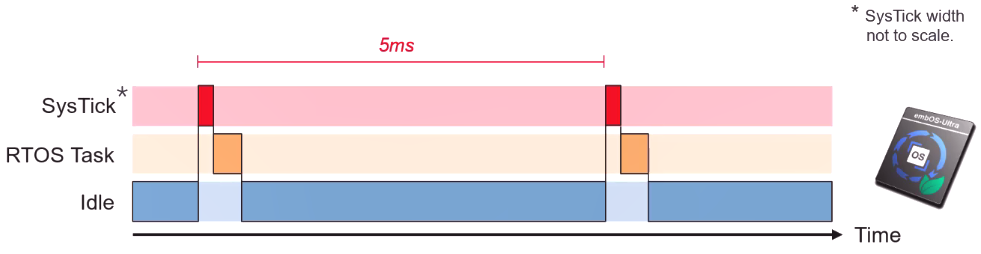
SEGGER之前推出的embOS Ultra,改變了過去RTOS采用周期節拍中斷作為系統時基的工作方式,采用硬件定時器加計數器的方式,只在必要時產生中斷。這就消除了傳統的周期性節拍中斷,減少了不必要的CPU活動,同時能降低系統的功耗。embOS Ultra基于時間事件的調度都能以微秒指定。
 ?
?體驗embOS Ultra微秒級調度
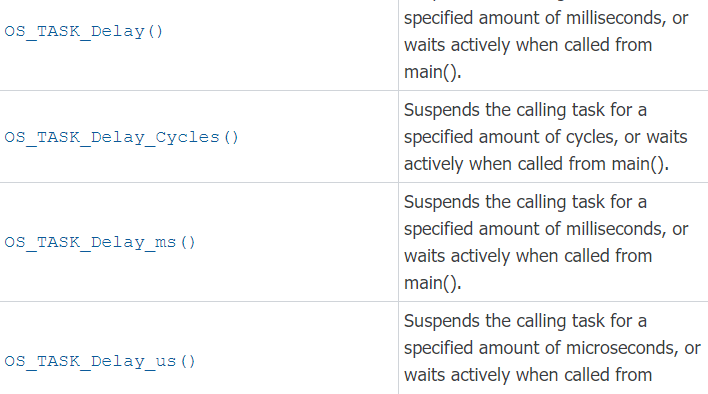
目前embOS Ultra支持CortexM/R/A,以及RISC-V架構的處理器。從官網可以下載到基于SEGGER Embedded Studio的示例Demo,用于測試,內核以二進制庫提供。embOS Ultra的API完全兼容embOS,只是多了幾個任務管理的API,任務可以按照ms或us延遲。
先將Demo例程的任務做了修改,HPTask分別以1000us、2000us不等延遲,LPTask以80ms延遲。
static void HPTask(void) {while (1) {BSP_SetLED(0);OS_TASK_Delay_us(1000);BSP_ClrLED(0);OS_TASK_Delay_us(2000);BSP_SetLED(0);OS_TASK_Delay_us(3000);BSP_ClrLED(0);OS_TASK_Delay_us(4000);}}static void LPTask(void) {while (1) {BSP_ToggleLED(1);OS_TASK_Delay_ms(80u);}}
下載代碼至目標板上運行,通過SystemView來觀測系統的執行:
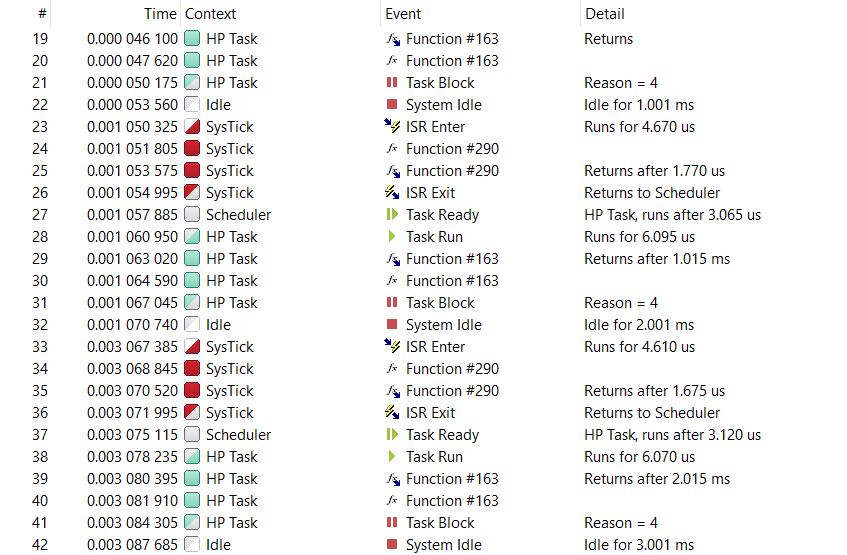
從OS事件視圖可以看到,系統不存在周期性的節拍中斷,只是在需要進行任務調度時觸發一次中斷。從下面的Timeline視圖可以更直觀的看出,紅色涂抹的位置是系統中斷。
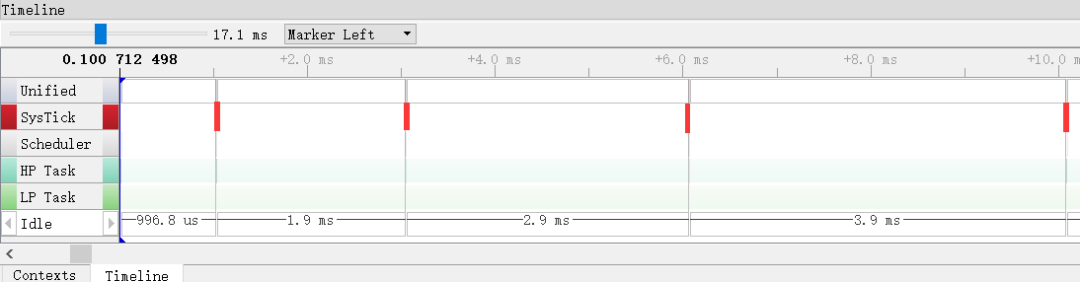
注意上圖中的時間(996.8us、1.9ms,2.9ms……)并不是任務的間隔時間,而是調度器執行的間隔時間。
再將任務代碼改成:
static void HPTask(void) {while (1) {BSP_SetLED(0);OS_TASK_Delay_us(50);BSP_ClrLED(0);OS_TASK_Delay_us(100);}}static void LPTask(void) {while (1) {BSP_ToggleLED(1);OS_TASK_Delay_us(200u);}}
HPTask任務分別延遲50us和100us,LPTask延遲200us,運行后觀測Timeline:

HPTask首次執行延遲了50us之后,系統定時器中斷觸發,調度器開始執行,從IDEL任務切換到HPTask任務。同時可以發現,從中斷觸發到HPTask任務體開始執行實際上已經過去了10us,這是因為中斷處理和任務調度的執行需要消耗一定CPU時間,這個與處理器架構和CPU運行頻率有關,在Cortex-M上大概在10us左右。也就是說在當前的處理器上,延遲時間小于10us是沒有意義的,但是在主頻很高的MPU(應用處理器)上這個時間可能要短很多。
總之,現在很多的MCU的性能都已經很高了。同時,一些應用要求處理器有比較高的計算能力,還要求系統能有很好的實時性,甚至在MPU上使用RTOS。此種應用場景下,如果RTOS支持CPU周期級別的分辨率,這實際上可以進一步提升系統的實時性。而且,在針對一些外設的處理上,使用微秒級的延遲,還能提高CPU的使用效率,擴展了RTOS的潛在應用范圍。
審核編輯 :李倩
-
mcu
+關注
關注
146文章
17316瀏覽量
352237 -
高分辨率
+關注
關注
0文章
46瀏覽量
15336 -
定時器
+關注
關注
23文章
3255瀏覽量
115177
原文標題:embOS-Ultra:高分辨率系統時間
文章出處:【微信號:麥克泰技術,微信公眾號:麥克泰技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Flexible Safety RTOS的技術特征
深入解析Zephyr RTOS的技術細節

RTOS正在縮小與Linux的差距

freertos和rtos區別是什么
國產HMI芯片Model系列融合OneOS與RT-Thread,RTOS優勢體現在哪?

RTOS系統在國產工業級HMI芯片Model系列中的深度應用與性能優化

RTOS與Linux有什么區別
RTOS的特性和類型
RTOS開發最佳實踐
簡單認識RTOS實時操作系統
什么是實時操作系統(3)-在 RTOS 中可以期待什么?

基于RTOS的應用進程中的典型線程

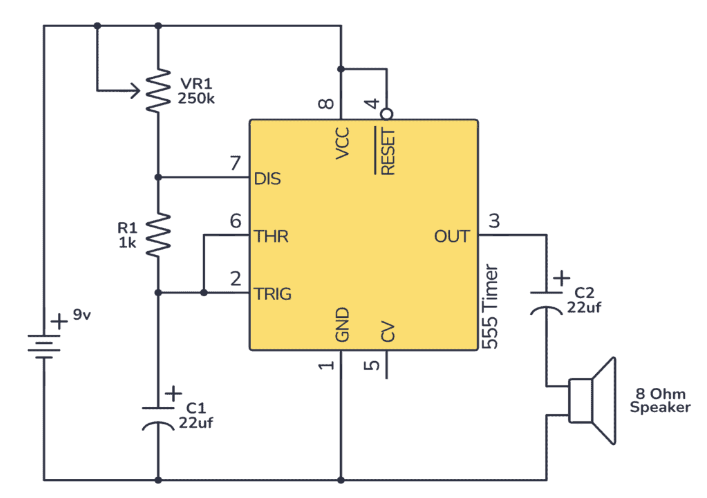
如何使用555定時器構建一個簡單的節拍器





 工商網監
工商網監
評論