 虛擬數字機器人仿真測試驗證平臺(C6657+FPGA架構)
虛擬數字機器人仿真測試驗證平臺(C6657+FPGA架構)
一、平臺特點
真正提供機器人控制器檢測、驗證平臺,可檢測各類工業機器人控制器的功能、性能指標;
全國產化,具備從虛擬機器人軟件框架到硬件采集電路全方位自主開發;
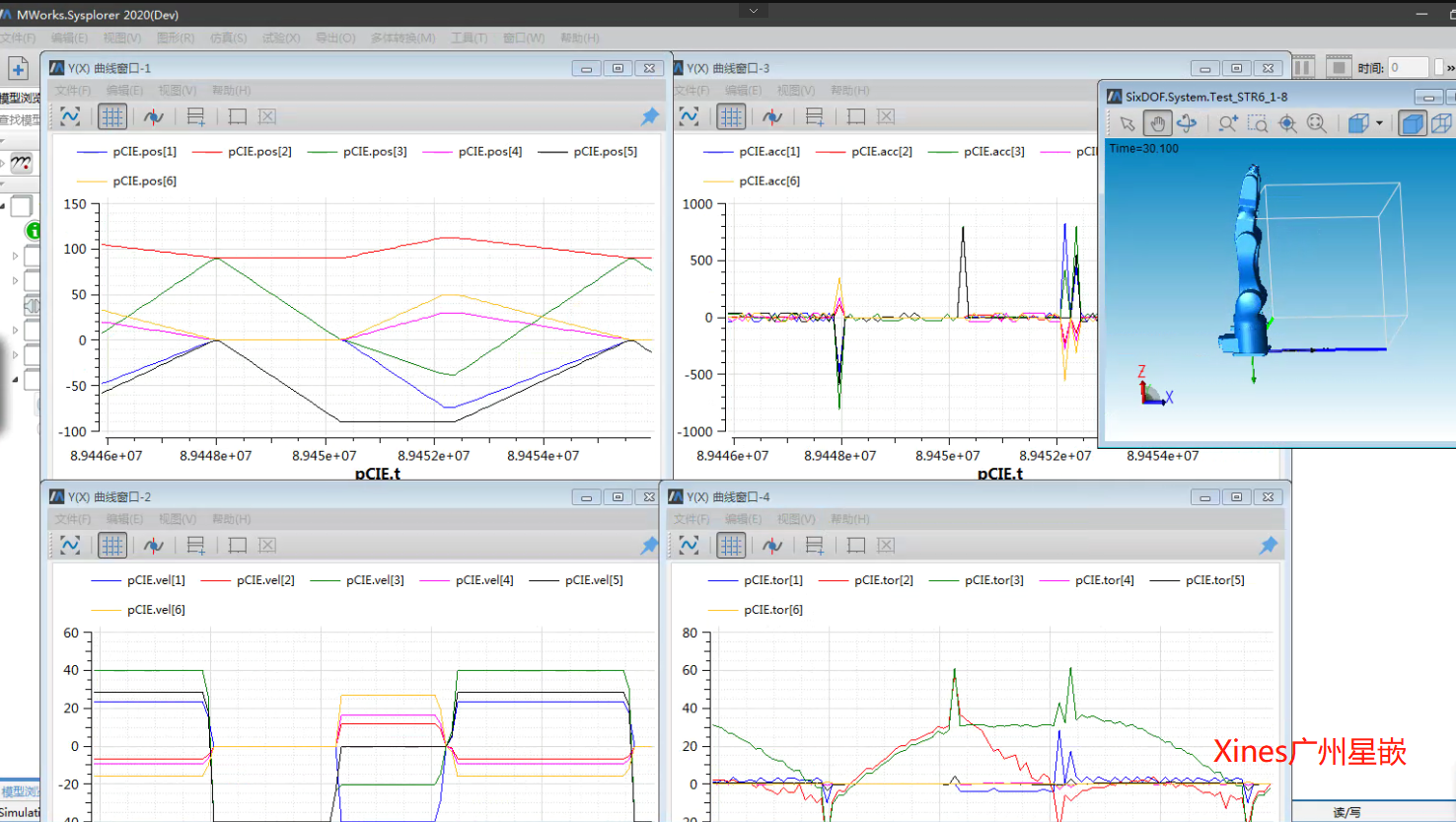
提供基于EtherCAT協議的檢測、驗證接口,提供“實物機器人+半物理平臺+虛擬機器人”的運動及動力學系統辨識場景。
允許基于EtherCAT總線的機器人控制器連接,仿真硬件可實時吞吐仿真數據,實現ms級的檢測、驗證。


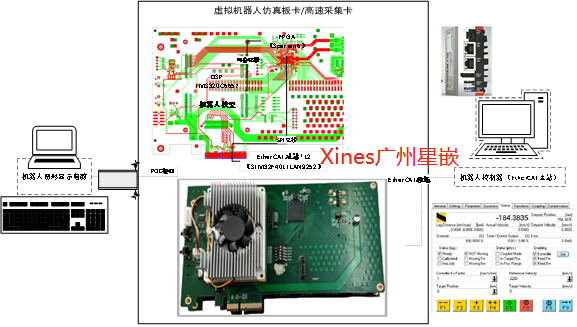
系統構成:
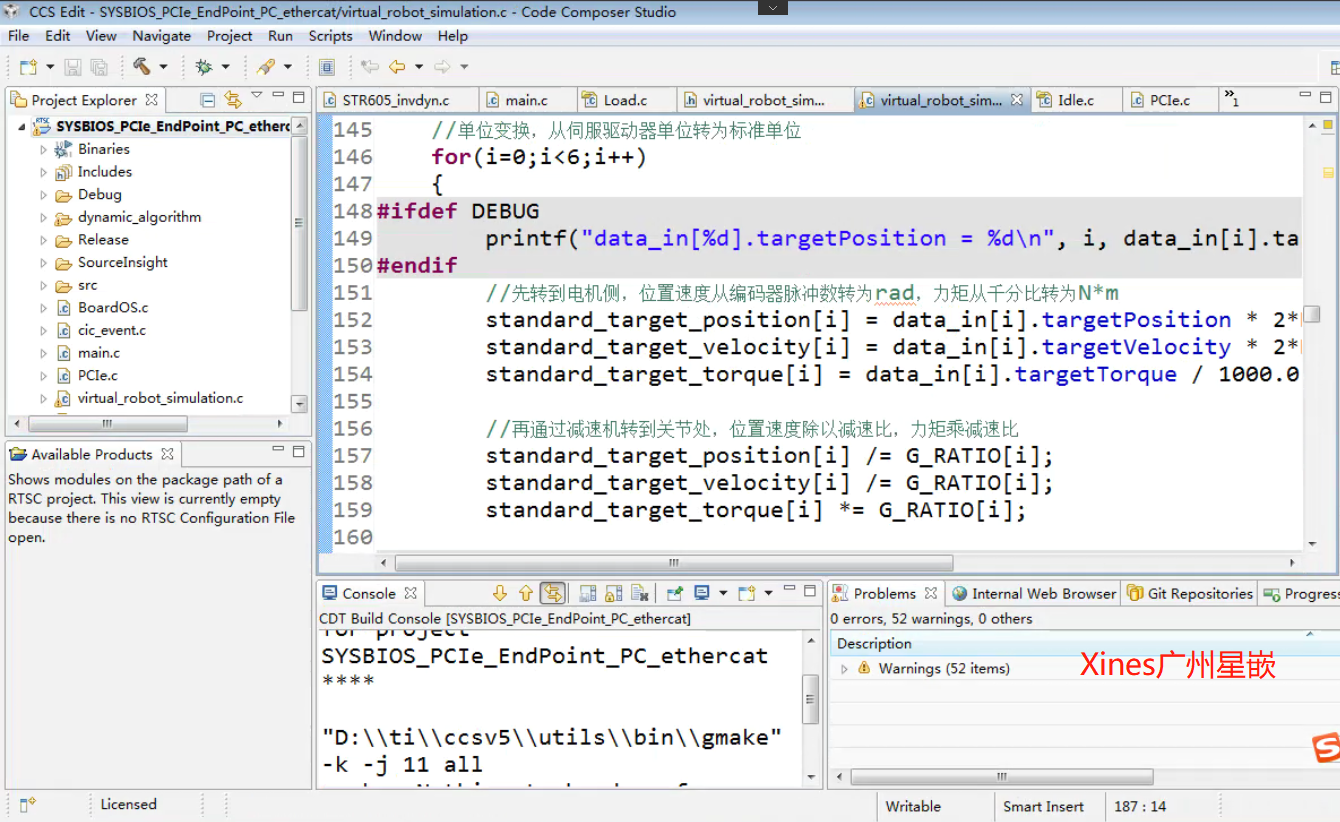
硬件包括DSP高速采集板+12個EtherCAT從站板,通過PCIe總線擴展;
軟件架構:
支持Qt的可擴展檢測界面,驗證案例庫,可導入機器人實體3D模型庫,EtherCAT 組件庫,數據分析和演示庫,輸出檢測、驗證表單等功能模塊;
產品特色:
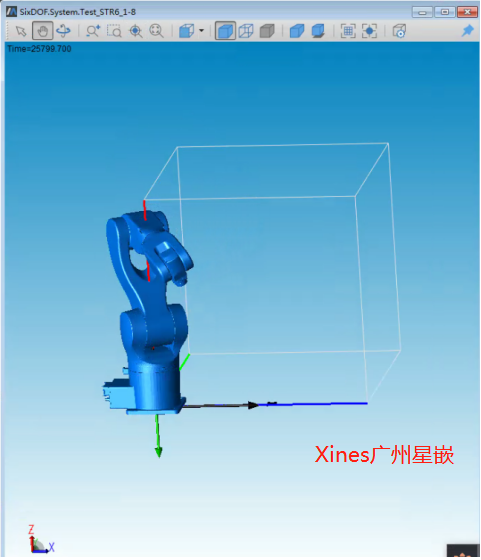
帶重力場/摩擦力模型的矢量環境,可導入標準CAD模型,并提供數字電機、數字編碼器、數字減速機建模,重構虛擬機器人物理元素,最大支持12個機器人關節及外軸模型;
二、系統優勢
快速導入機器人3D模型,僅需一塊PCIe卡連接一條網線,即可實現面向機器人控制器的功能與性能實驗、測試、驗證工作,國內首創;
基于EtherCAT協議,集成多種開發包,既可支持研究、開發方案驗證,又可作為標準檢測工具,可安全檢測滿負荷、超負荷運動及動力學功能;
實時接入EtherCAT從站,配置ESI文件為標準ECAT從站;兼容倍福、卡諾普、KEBA、固高、埃斯頓等工業機器人主站;支持采用KPA、acontis、codesys、 igh、 soem等被檢主站控制器;
不僅僅是動畫,是帶采集硬件的科研平臺!!!
實物展示
咨詢未必選擇,只是多一個參考,歡迎交流與合作。
審核編輯 黃昊宇
-
機器人
+關注
關注
211文章
28613瀏覽量
207894 -
仿真測試
+關注
關注
0文章
90瀏覽量
11325
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】+數據在具身人工智能中的價值
高壓放大器在水下撲翼軟體機器人研究中的應用


ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
工業機器人仿真軟件有哪些
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
廣和通發布基于高通高算力芯片的具身智能機器人開發平臺Fibot
廣和通發布具身智能機器人開發平臺Fibot
NVIDIA Isaac機器人平臺升級,加速AI機器人技術革新
NVIDIA入局人形機器人!Isaac平臺迎來重要更新






 工商網監
工商網監
評論