 使用NVIDIA QAT工具包實現TensorRT量化網絡的設計
使用NVIDIA QAT工具包實現TensorRT量化網絡的設計
出身背景
加速深層神經網絡( DNN )推理是實現實時應用(如圖像分類、圖像分割、自然語言處理等)延遲關鍵部署的重要步驟。
改進 DNN 推理延遲的需要引發了人們對以較低精度運行這些模型的興趣,如 FP16 和 INT8 。在 INT8 精度下運行 DNN 可以提供比其浮點對應項更快的推理速度和更低的內存占用。 NVIDIA TensorRT 支持訓練后量化( PTQ )和 QAT 技術,將浮點 DNN 模型轉換為 INT8 精度。
在這篇文章中,我們討論了這些技術,介紹了用于 TensorFlow 的 NVIDIA QAT 工具包,并演示了一個端到端工作流,以設計最適合 TensorRT 部署的量化網絡。
量化感知訓練
QAT 背后的主要思想是通過最小化訓練期間的量化誤差來模擬低精度行為。為此,可以通過在所需層周圍添加量化和去量化( QDQ )節點來修改 DNN 圖。這使得量化網絡能夠將由于模型量化和超參數的微調而導致的 PTQ 精度損失降至最低。
另一方面, PTQ 在模型已經訓練之后,使用校準數據集執行模型量化。由于量化沒有反映在訓練過程中,這可能導致精度下降。圖 1 顯示了這兩個過程。
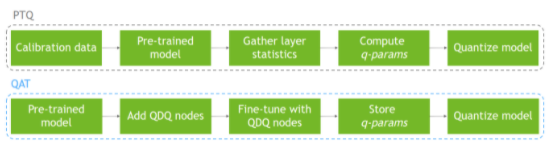
圖 1 通過 PTQ 和 QAT 的量化工作流
用于 TensorFlow 的 NVIDIA QAT 工具包
該工具包的目標是使您能夠以最適合于 TensorRT 部署的方式輕松量化網絡。
目前, TensorFlow 在其開源軟件 模型優化工具包 中提供非對稱量化。他們的量化方法包括在所需層的輸出和權重(如果適用)處插入 QDQ 節點,并提供完整模型或部分層類類型的量化。這是為 TFLite 部署而優化的,而不是 TensorRT 部署。
需要此工具包來獲得一個量化模型,該模型非常適合 TensorRT 部署。 TensorRT optimizer 傳播 Q 和 DQ 節點,并通過網絡上的浮點操作將它們融合在一起,以最大化 INT8 中可以處理的圖形比例。這將導致 NVIDIA GPU 上的最佳模型加速。我們的量化方法包括在所需層的輸入和權重(如果適用)處插入 QDQ 節點。
我們還執行對稱量化( TensorRT 使用),并通過層名稱和 基于模式的層量化 的部分量化提供擴展量化支持。
表 1 總結了 TFMOT 和用于 TensorFlow 的 NVIDIA QAT 工具包之間的差異。
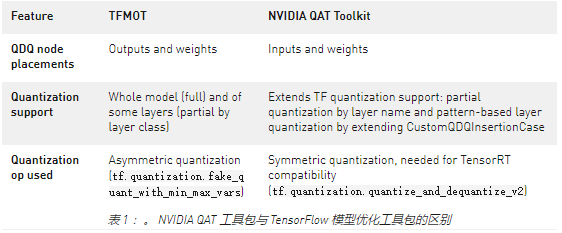
圖2顯示了一個簡單模型的前/后示例,用 Netron 可視化。QDQ節點放置在所需層的輸入和權重(如適用)中,即卷積(Conv)和完全連接(MatMul)。
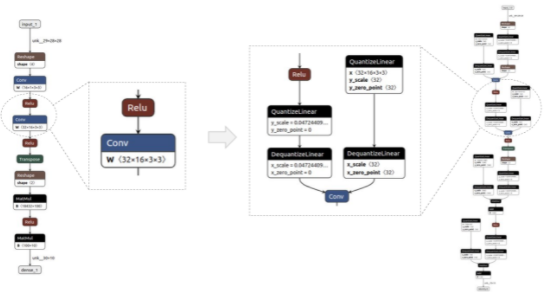
圖 2 量化前后的模型示例(分別為基線和 QAT 模型)
TensorRT 中部署 QAT 模型的工作流
圖 3 顯示了在 TensorRT 中部署 QAT 模型的完整工作流,該模型是通過 QAT 工具包獲得的。

圖 3 TensorRT 使用 QAT 工具包獲得的 QAT 模型的部署工作流
假設預訓練的 TensorFlow 2 模型為 SavedModel 格式,也稱為基線模型。
使用quantize_model功能對該模型進行量化,該功能使用 QDQ 節點克隆并包裝每個所需的層。
微調獲得的量化模型,在訓練期間模擬量化,并將其保存為SavedModel格式。
將其轉換為 ONNX 。
然后, TensorRT 使用 ONNX 圖來執行層融合和其他圖優化,如 專用 QDQ 優化 ,并生成一個用于更快推理的引擎。
ResNet-50v1 示例
在本例中,我們將向您展示如何使用 TensorFlow 2 工具包量化和微調 QAT 模型,以及如何在 TensorRT 中部署該量化模型。有關更多信息,請參閱完整的 example_resnet50v1.ipynb Jupyter 筆記本。
要求
要跟進,您需要以下資源:
Python 3.8
TensorFlow 2.8
NVIDIA TF-QAT 工具包
TensorRT 8.4
準備數據
對于本例,使用 ImageNet 2012 數據集 進行圖像分類(任務 1 ),由于訪問協議的條款,需要手動下載。 QAT 模型微調需要此數據集,它還用于評估基線和 QAT 模型。
登錄或注冊鏈接網站,下載列車/驗證數據。您應該至少有 155 GB 的可用空間。
工作流支持 TFRecord 格式,因此請使用以下說明(從 TensorFlow 說明 ) 轉換下載的。將 ImageNet 文件轉換為所需格式:
set IMAGENET_HOME=/path/to/imagenet/tar/files in data/imagenet_data_setup.sh 。
將 imagenet_to_gcs.py 下載到$IMAGENET_HOME。
Run 。/data/imagenet_data_setup.sh.
您現在應該可以在$IMAGENET_HOME中看到兼容的數據集。
量化和微調模型
from tensorflow_quantization import quantize_model from tensorflow_quantization.custom_qdq_cases import ResNetV1QDQCase # Create baseline model model = tf.keras.applications.ResNet50(weights="imagenet", classifier_activation="softmax") # Quantize model q_model = quantize_model(model, custom_qdq_cases=[ResNetV1QDQCase()]) # Fine-tune q_model.compile( optimizer="sgd", loss=tf.keras.losses.SparseCategoricalCrossentropy(), metrics=["accuracy"] ) q_model.fit( train_batches, validation_data=val_batches, batch_size=64, steps_per_epoch=500, epochs=2 ) # Save as TF 2 SavedModel q_model.save(“saved_model_qat”)
將 SavedModel 轉換為 ONNX
$ python -m tf2onnx.convert --saved-model=--output= --opset 13
部署 TensorRT 發動機
將 ONNX 模型轉換為 TensorRT 引擎(還可以獲得延遲測量):
$ trtexec --onnx=--int8 --saveEngine= -v
獲取驗證數據集的準確性結果:
$ python infer_engine.py --engine=--data_dir= -b=
后果
在本節中,我們報告了 ResNet 和 EfficientNet 系列中各種型號的準確性和延遲性能數字:
ResNet-50v1
ResNet-50v2
ResNet-101v1
ResNet-101v2
效率網 -B0
效率網 -B3
所有結果都是在 NVIDIA A100 GPU 上獲得的,批次大小為 1 ,使用 TensorRT 8.4 ( EA 用于 ResNet , GA 用于 EfficientNet )。
圖 4 顯示了基線 FP32 模型與其量化等效模型( PTQ 和 QAT )之間的精度比較。正如您所見,基線模型和 QAT 模型之間的準確性幾乎沒有損失。有時,由于模型的進一步整體微調,精度甚至更高。由于 QAT 中模型參數的微調, QAT 的精度總體上高于 PTQ 。
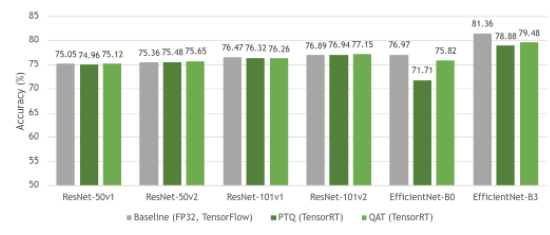
圖 4 FP32 (基線)、帶 PTQ 的 INT8 和帶 QAT 的 INT8 中 ResNet 和 EfficientNet 數據集的準確性
ResNet 作為一種網絡結構,一般量化穩定,因此 PTQ 和 QAT 之間的差距很小。然而, EfficientNet 從 QAT 中獲益匪淺,與 PTQ 相比,基線模型的準確度損失有所減少。
有關不同模型如何從 QAT 中受益的更多信息,請參見 深度學習推理的整數量化:原理與實證評價 (量化白皮書)中的表 7 。
圖 5 顯示了 PTQ 和 QAT 具有相似的時間,與各自的基線模型相比,它們引入了高達 19 倍的加速。

圖 5 ResNet 和 EfficientNet 系列中各種模型的延遲性能評估
PTQ 有時可能比 QAT 略快,因為它試圖量化模型中的所有層,這通常會導致更快的推斷,而 QAT 僅量化用 QDQ 節點包裹的層。
有關 TensorRT 如何使用 QDQ 節點的更多信息,請參閱 TensorRT 文檔中的 使用 INT8 和 走向 INT8 推理:使用 TensorRT 部署量化感知訓練網絡的端到端工作流 GTC 會話。
有關各種受支持型號的性能數字的更多信息,請參閱 model zoo 。
結論
在本文中,我們介紹了 TensorFlow 2 的 NVIDIA QAT 工具包 。 我們討論了在 TensorRT 推理加速環境中使用該工具包的優勢。然后,我們演示了如何將該工具包與 ResNet50 結合使用,并對 ResNet 和 EfficientNet 數據集執行準確性和延遲評估。
實驗結果表明,與 FP32 模型相比,用 QAT 訓練的 INT8 模型的精度相差約 1% ,實現了 19 倍的延遲加速。
關于作者
Gwena Cunha Sergio 在 NVIDIA 擔任深度學習軟件工程師。在此之前,她是韓國京浦國立大學的一名博士生,致力于研究基于深度學習的方法,用于嘈雜的自然語言處理任務和從多模態數據生成序列。
Sagar Shelke 是 NVIDIA 的深度學習軟件工程師,專注于自主駕駛應用程序。他的興趣包括用于部署和機器學習系統的神經網絡優化。薩加爾擁有圣地亞哥州立大學電氣和計算機工程碩士學位。
Dheeraj Peri 在 NVIDIA 擔任深度學習軟件工程師。在此之前,他是紐約羅切斯特理工學院的研究生,致力于基于深度學習的內容檢索和手寫識別方法。 Dheeraj 的研究興趣包括信息檢索、圖像生成和對抗性機器學習。他獲得了印度皮拉尼 Birla 理工學院的學士學位。
Josh Park 是 NVIDIA 的汽車解決方案架構師經理。到目前為止,他一直在研究使用 DL 框架的深度學習解決方案,例如在 multi-GPUs /多節點服務器和嵌入式系統上的 TensorFlow 。此外,他一直在評估和改進各種 GPUs + x86 _ 64 / aarch64 的訓練和推理性能。他在韓國大學獲得理學學士和碩士學位,并在德克薩斯農工大學獲得計算機科學博士學位
審核編輯:郭婷
-
神經網絡
+關注
關注
42文章
4779瀏覽量
101032 -
NVIDIA
+關注
關注
14文章
5072瀏覽量
103520
發布評論請先 登錄
相關推薦
最新Simplicity SDK軟件開發工具包發布
解鎖NVIDIA TensorRT-LLM的卓越性能
NVIDIA TensorRT-LLM Roadmap現已在GitHub上公開發布

基于EasyGo Vs工具包和Nl veristand軟件進行的永磁同步電機實時仿真

TensorRT-LLM低精度推理優化

FPGA仿真工具包軟件EasyGo Vs Addon介紹
英國公司實現英偉達CUDA軟件在AMD GPU上的無縫運行
使用freeRTOS開發工具包時,在哪里可以找到freeRTOS的版本?
MediaTek與NVIDIA TAO加速物聯網邊緣AI應用發展
存內計算技術工具鏈——量化篇
Edge Impulse發布新工具,助 NVIDIA 模型大規模部署
QE for Motor V1.3.0:汽車開發輔助工具解決方案工具包






 工商網監
工商網監
評論