 英創匯智AEBS系統環境感知方案的工作機制
英創匯智AEBS系統環境感知方案的工作機制
引言:ADAS (Advanced Driver Assistance System)作為一種高級駕駛輔助系統,其利用車載信息傳感器獲取道路目標信息并對車輛的行駛做出部分自動控制,以此減輕駕駛員的駕駛負擔。此外,在主車即將發生碰撞或失穩危險而駕駛員未及時采取有效措施時,該系統可對主車進行自動安全控制,從而避免交通事故的發生或減小交通事故的傷害程度。其中ADAS包括AEBS、ACC、LKAS、BSD等功能,本文主要介紹AEBS (Autonomous Emergency Braking System) 的原理,以及英創匯智AEBS系統環境感知方案的工作機制。
一、AEBS發展的意義
據相關數據分析,導致追尾事故的駕駛員的制動行為主要有以下三種:

1.制動遲緩:駕駛員全力制動,但采取措施過晚;

2.制動不足:一般駕駛員采取制動,卻制動過輕;
3.無制動:駕駛員未注意到危險,而未采取制動措施;
針對以上三種交通事故情況,英創匯智研發出AEBS系統。AEBS是一種主動安全技術,通過傳感器檢測可能發生的碰撞危險,提前警示駕駛員制動,并在必要時自動制動,防止碰撞的發生或最大限度的降低碰撞的傷害。
二、AEBS技術環境感知配置方案
ADAS系統由環境感知、控制決策、底層執行和人機交互四個基礎模塊,具體架構如下圖所示:
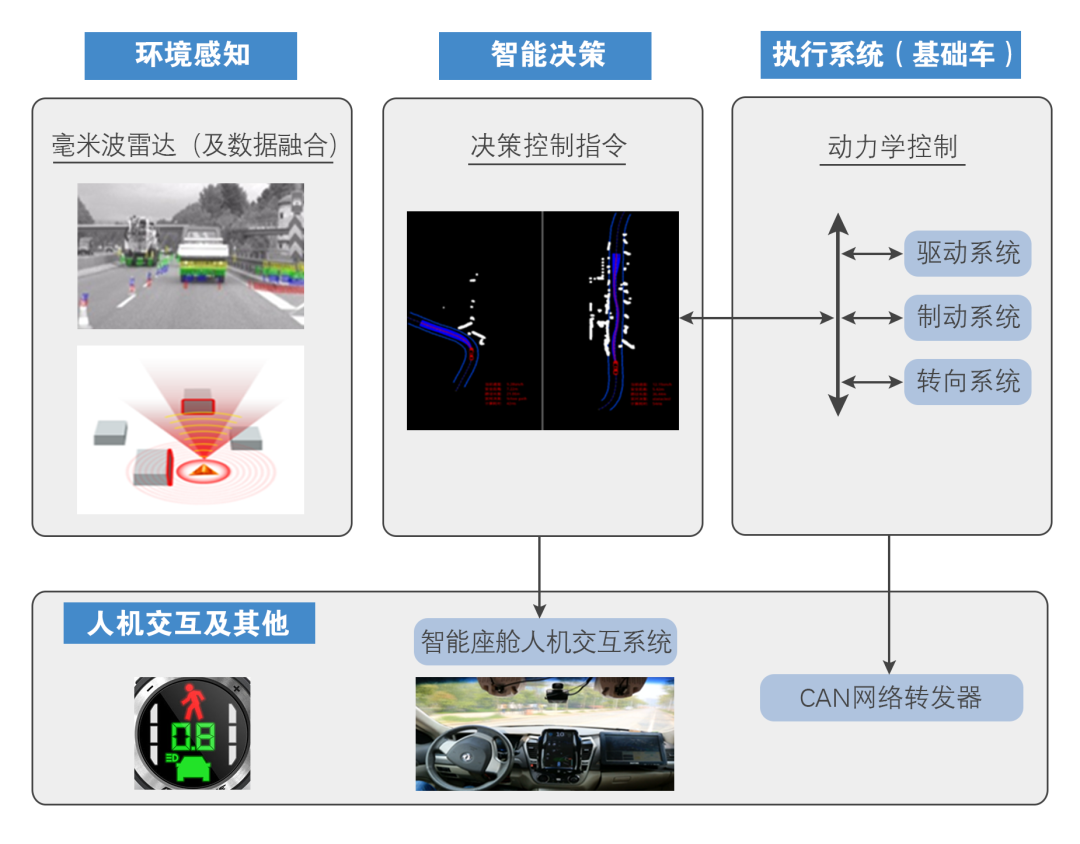
ADAS整體架構詳解
其中,感知模塊由毫米波雷達和攝像頭組成,通過雷達和攝像頭數據融合,感知周邊障礙物信息以及可通行區域信息。控制決策模塊則根據感知信息,決策所需要的控制指令,向底層執行模塊發出指令,控制車輛制動系統來完成自適應跟車和自動緊急剎車。而ADAS系統的難點,在于環境精準識別以及基于EBS系統/改進ABS系統的主動制動執行系統。
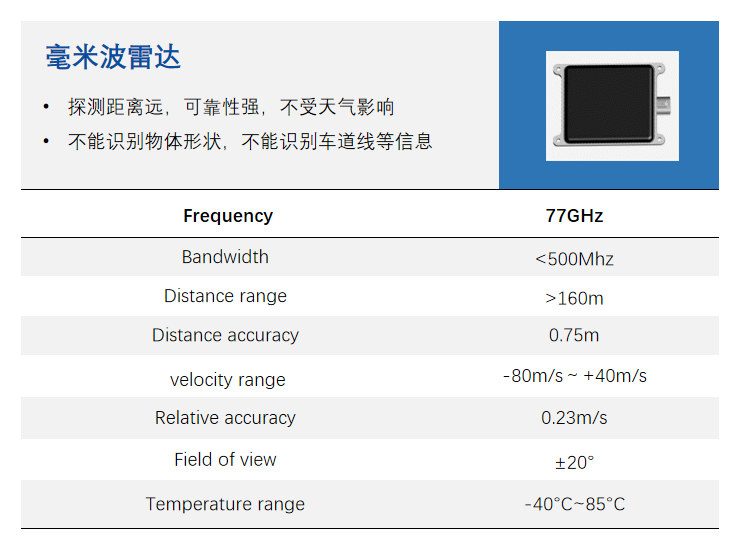
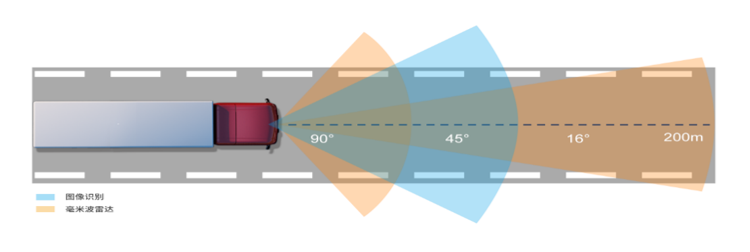
AEBS作為ADAS系統中的一個功能,其環境感知模塊所需傳感器與ADAS系統一致,主要由毫米波雷達和攝像頭構成,進一步地毫米波雷達與攝像頭優缺點以及工作特性總結如下:

三、AEBS功能描述與應用場景分析
AEBS主要包括預測碰撞警告 (PCW, Predictive Collision Warning)、緊急制動輔助 (EBA, Emergency Brake Assist)、自動緊急制動 (AEB, Autonomous Emergency Braking)等子功能。
3.1AEBS功能描述
(1)PCW:該功能主要針對追尾交通事故中場景一,當駕駛員沒有意識到行車過程中即將到來的危險時,通過在駕駛艙內發出蜂鳴聲、收緊安全帶甚至車輛突然制動抖動等警告措施,提醒駕駛員即將到來的危險,進而避免事故的發生。根據駕駛員的設置,AEBS可以實現不同敏感性的PCW,其具體工作參數與觸發條件如下圖所示:
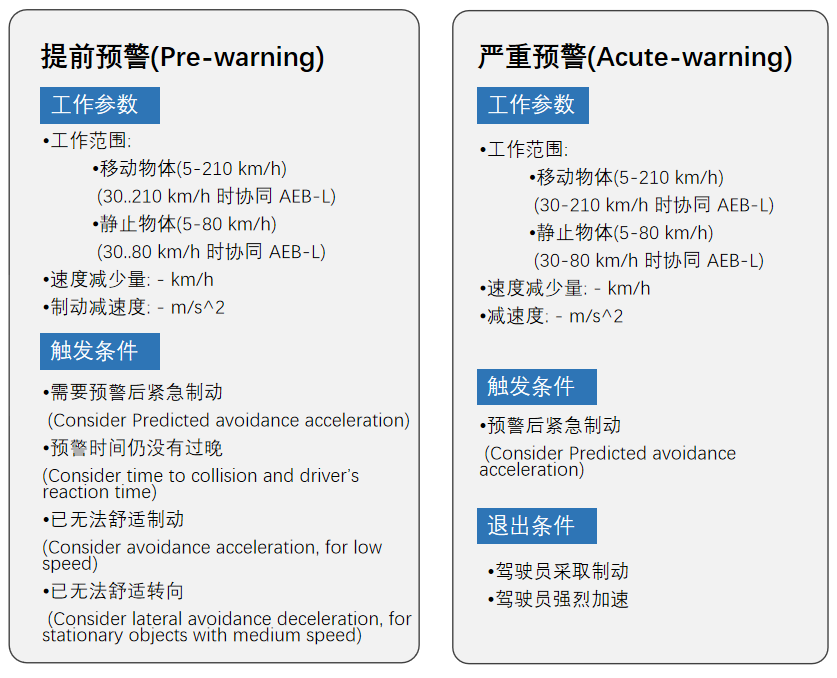
不同敏感性的PCW對比
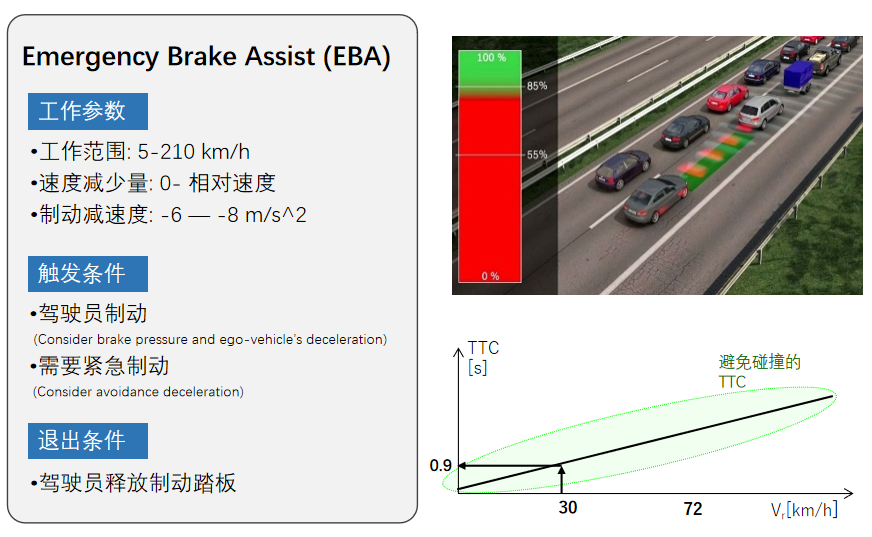
(2)EBA:該功能主要針對追尾交通事故中場景二,當駕駛員踩下制動踏板進行制動,但由于駕駛員經驗不足或者一些其他原因,使得車輛無法按照駕駛員預期制動效果進行制動時,通過控制器自行分析決策,合理控制車輛制動(放大根據駕駛員意圖控制的制動力矩),保證駕駛員的安全。進一步地EBA功能工作參數與切換條件總結如下:
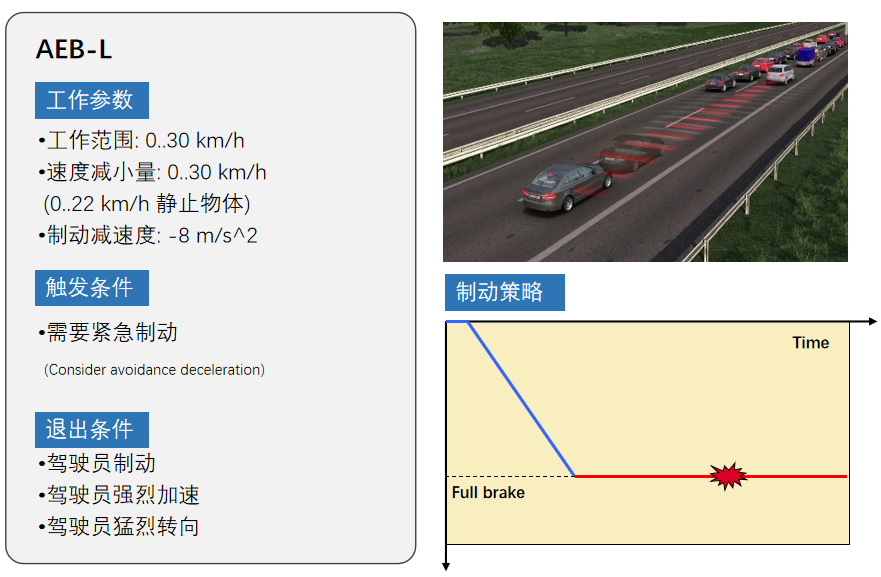
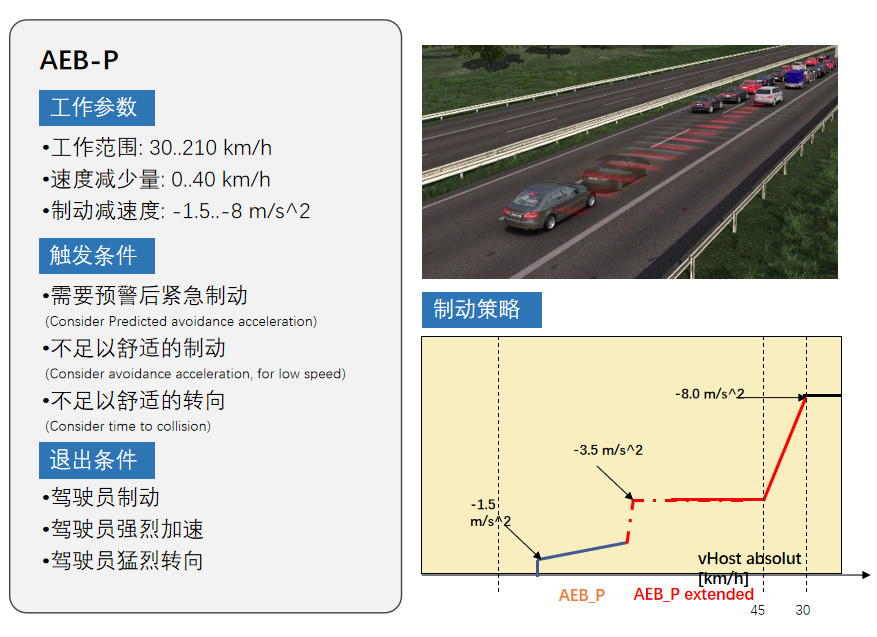
(3)AEB:該功能主要針對追尾交通事故場景三,即當車輛觸發了PCW功能以后,也并未成功警示駕駛員,這時車輛完全由控制器接管,進行制動控制。該功能在最大限度上避免交通事故的發生,當交通事故無法避免時也可減輕交通事故帶來的傷害。當兩車之間運動學關系不同時,AEB功能會提供不同制動策略(低速場景下為AEB-L功能,其余場景下為AEB-P功能),如下所示:
3.2AEBS應用場景分析
搭載AEBS的車輛在行駛過程中各子功能工作過程如下圖所示:
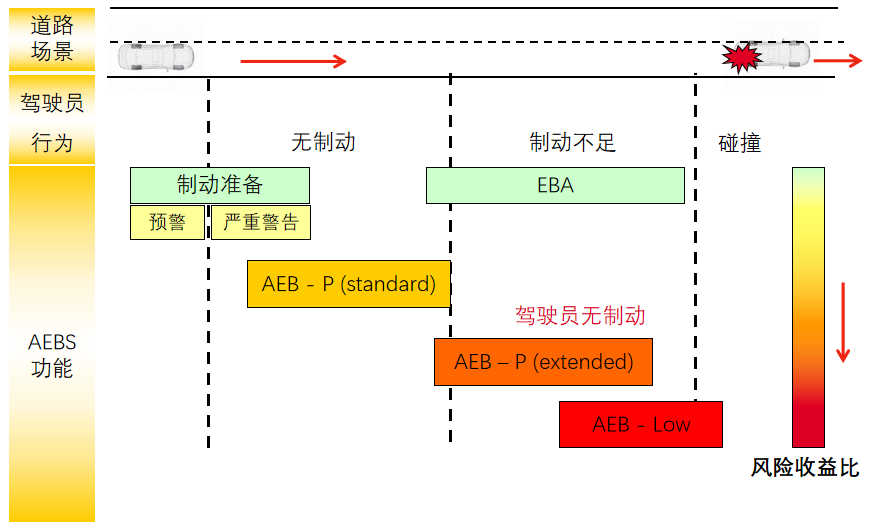
在車輛正常行駛過程中,當前方有障礙物碰撞風險時,首先觸發PCW功能對駕駛員進行警告,隨著車輛的行駛,一種情況是如果駕駛員踩下制動踏板但制動不足時觸發EBA功能(或者駕駛員完全制動不觸發EBA功能);另一種情況是駕駛員沒有踩下制動踏板,這時AEB功能觸發,根據當前車輛與前方障礙物的關系,AEB功能對本車進行不同強度的制動控制,最后避免交通事故的發生或者減輕交通事故的傷害。
搭載AEBS的車輛在行駛過程中子功能觸發后制動力如下圖所示:
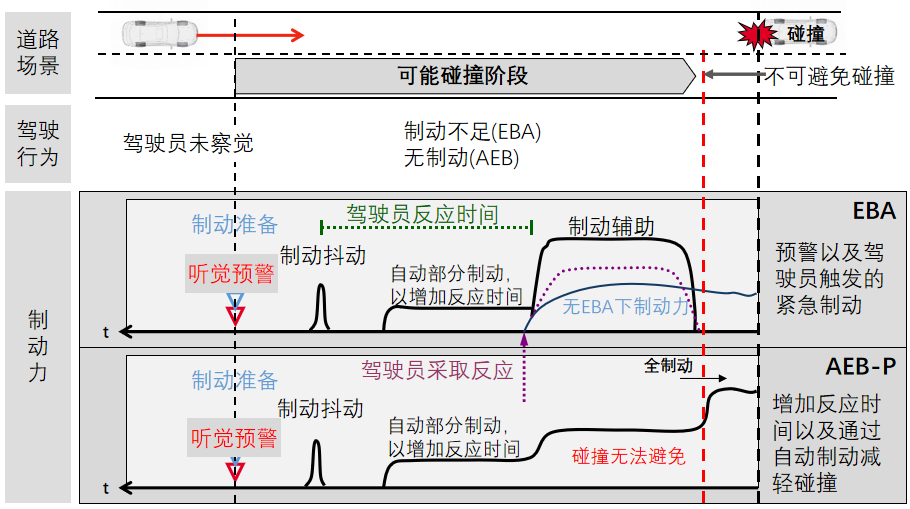
隨著車輛的行駛,首先觸發PCW,其中通過突然制動抖動來提醒駕駛員,因此存在制動力變化;然后考慮到安全性,AEBS功能會進行自動部分制動以增加駕駛員反映時間,來避免交通事故;最后根據駕駛員的實際操作來判斷觸發EBA功能還是AEB功能,進而避免交通事故或者減少碰撞傷害。
四、AEBS 決策與規劃層分析
4.1AEBS 算法架構
AEBS主要通過車輛搭載的攝像頭以及毫米波雷達(也可單獨使用攝像頭)進行周圍環境的感知建圖,通過與CAN網絡通訊獲取自身車輛狀態信息,進一步地根據本車信息與周圍環境信息進行判斷,當滿足各子功能觸發條件時,各功能開始工作,從而避免交通事故的發生或減小交通事故的傷害程度。其算法架構如下圖所示:
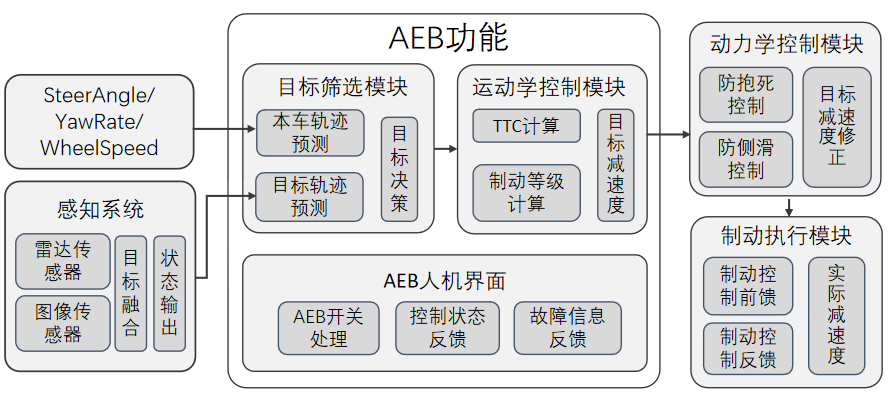
AEBS算法架構
AEB算法主要分為四大模塊:感知系統模塊、AEB功能模塊、動力學控制模塊和制動執行模塊。其中AEBS各子功能的不同之處在于本車與前方障礙物之間的運動學關系以及車輛自身狀態,AEBS根據獲取的相關信息進行不同危險程度的判斷進而觸發不同子功能。
4.2子模塊間關系
感知系統將融合后的障礙物信息發送到目標篩選模塊,與此同時本車軌跡預測模塊根據本車相應運行狀態計算轉彎半徑。轉向半徑計算模塊計算出車輛的轉向半徑,被目標篩選模塊、TTC計算模塊、FCW激活條件判斷和AEB激活條件判斷所使用。目標篩選模塊通過橫向距離篩選出最危險的目標障礙物,最危險的目標障礙物信息被TTC計算模塊和目標減速度計算模塊。TTC計算模塊通過與目標障礙物的相對距離和相對速度計算出實時TTC,計算出的TTC被預警模塊和緊急制動模塊所使用。目標減速度計算模塊本著使車輛停在安全距離范圍內的原則,對目標減速度進行計算,計算出的目標減速度被緊急制動模塊所使用。預警模塊根據危險程度通過預警邏輯向執行層發出預警指令。緊急制動模塊根據危險程度通過緊急制動邏輯向執行層發出制動指令。預警模塊和緊急制動模塊向底層發出制動指令的同時也向人機交互模塊發送信號燈和聲音執行指令,人機交互模塊同樣也可以通過按鈕來控制預警模塊和緊急制動模塊。
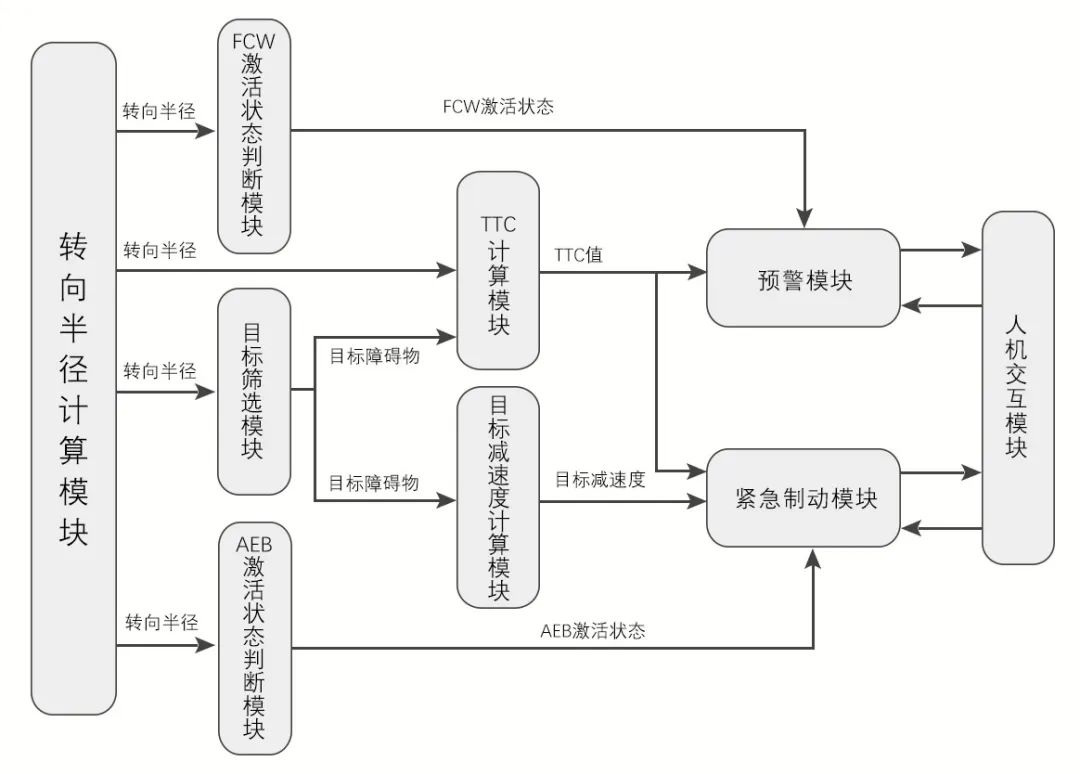
子模塊關系圖
(1)感知系統模塊
感知系統模塊主要包括雷達傳感器目標探測,攝像傳感器目標識別,以及兩者目標檢測的融合。
(2)AEB功能模塊
■ AEB人機界面;該部分主要與駕駛員互動用,集成AEB開關,顯示控制狀態和故障信息;
■ 目標篩選模塊:該部分主要針對雷達和攝像頭檢測出來的目標進行篩選,根據本車軌跡預測和目標軌跡預測,判斷判斷兩車的運動軌跡是否重合,存在潛在的碰撞可能性,以此來確定目標車輛;
■ AEB運動學控制模塊:搭建TTC模型,計算出將要碰撞的時間t,并根據車速v和碰撞時間t計算出制動等級,并制定每個等級下的目標減速度。
自車與目標車輛的縱向車速之差,計算方法見公式:

(3)動力學控制模塊
■由上一個模塊得到了目標減速度,但是并沒有考慮整車的動力學特性。實際的目標減速度還要根據動力學特征,在防抱死控制和防側滑控制的基礎下進一步的修正目標減速度。
(4)制動執行模塊
■制動執行模塊主要由ESC完成,ESC為電子穩定系統,連接ABS模塊,可以在汽車緊急制動時保證汽車的穩定性,按要求執行AEB給出的目標減速度。
五、碰撞風險評估準則
TTC (Time-to-collision) 是一個經典的碰撞風險評估的準則,但其無法有效反映車輛行駛過程中潛在的風險,因此下面介紹幾種碰撞風險評估準則:
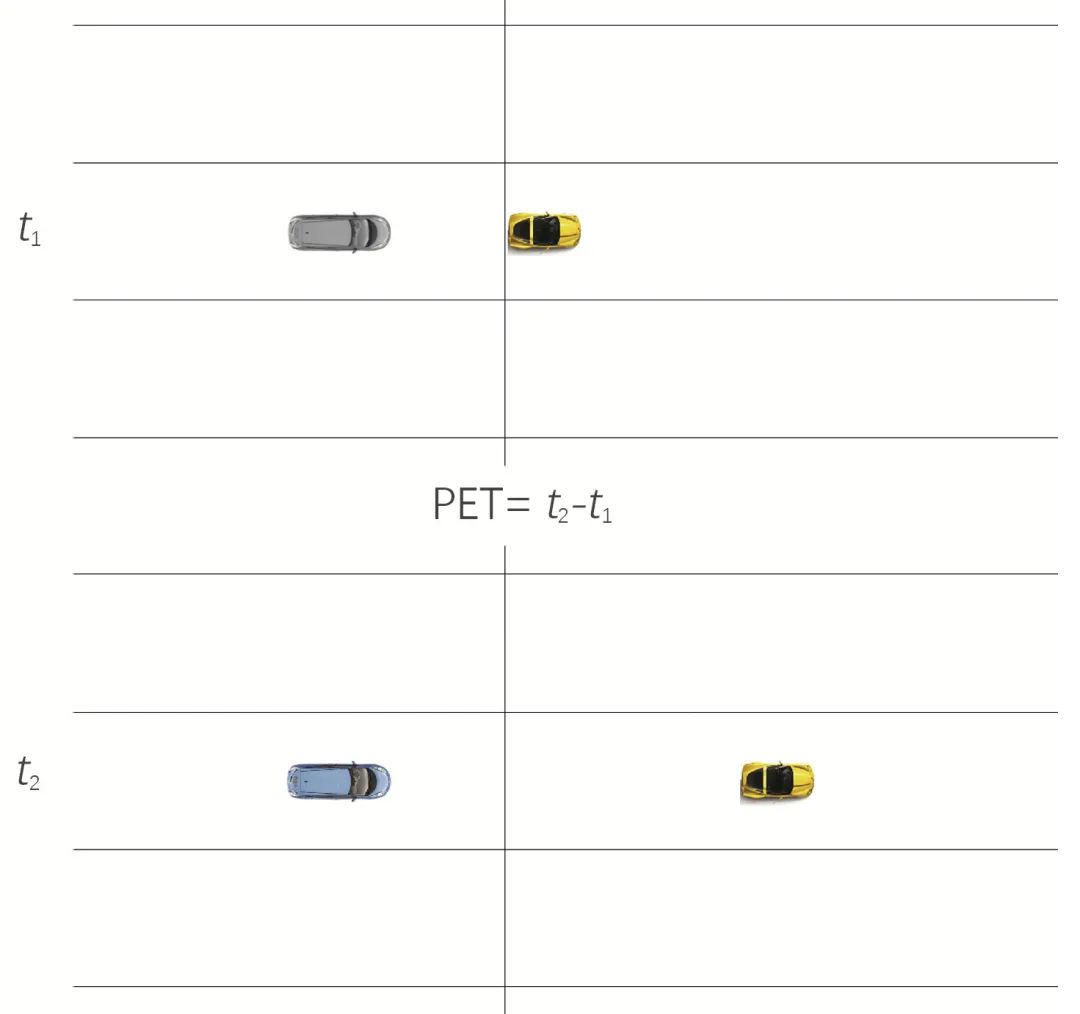
(1)PET(Post-encroachment time) 是一輛車進入沖突點的時間 (t2) 與另一輛車到達該點的時間(t1) 之差,具體情況見下圖:
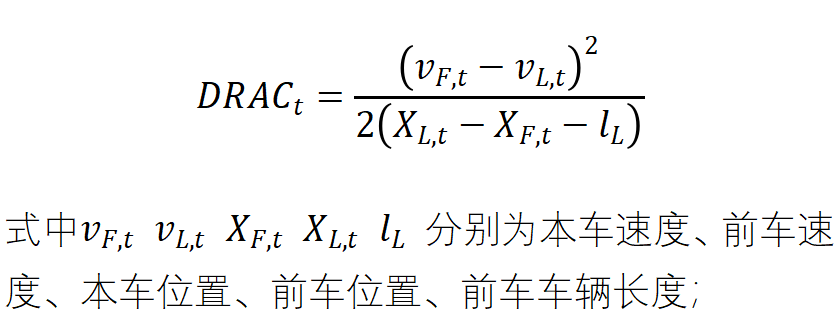
(2)DRAC(Deceleration rate to avoid collision) 能夠很好察覺車輛行駛過程的潛在危險,其計算公式如下:
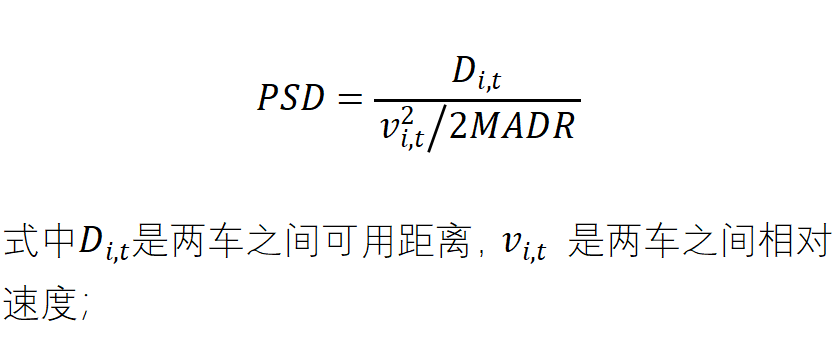
(3)PSD(Proportion of stopping distance) 是兩輛車之間可用的距離與MADR (最大可用DRAC所需的距離)之比,具體計算公式如下:
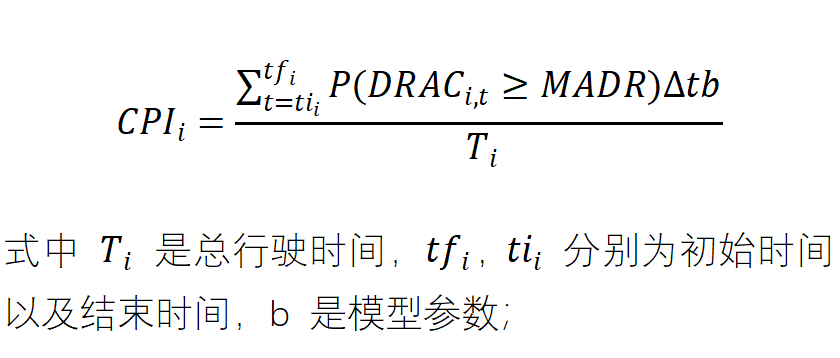
(4)CPI(Crash potential index) 是某時刻避免碰撞的減速率(DRAC)超過MADR的概率,其中MADR 會受到車輛種類以及道路環境的影響,具體計算公式如下:
鑒于TTC在衡量車輛碰撞風險上存在缺陷,目前本公司借鑒上述碰撞風險評估準則,正在逐步開發新型的碰撞風險評估準則。
審核編輯 :李倩
-
傳感器
+關注
關注
2552文章
51382瀏覽量
755774 -
adas
+關注
關注
309文章
2193瀏覽量
208780
原文標題:英創匯智AEBS技術環境感知配置方案,如何減緩交通事故傷害?
文章出處:【微信號:trinova-tech,微信公眾號:英創匯智】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
英創匯智榮登2024VENTURE50投資界硬科技榜單
英創匯智斬獲江鈴新能源和南京依維柯榮譽獎項
英創匯智榮獲江汽集團2024年度價值貢獻獎
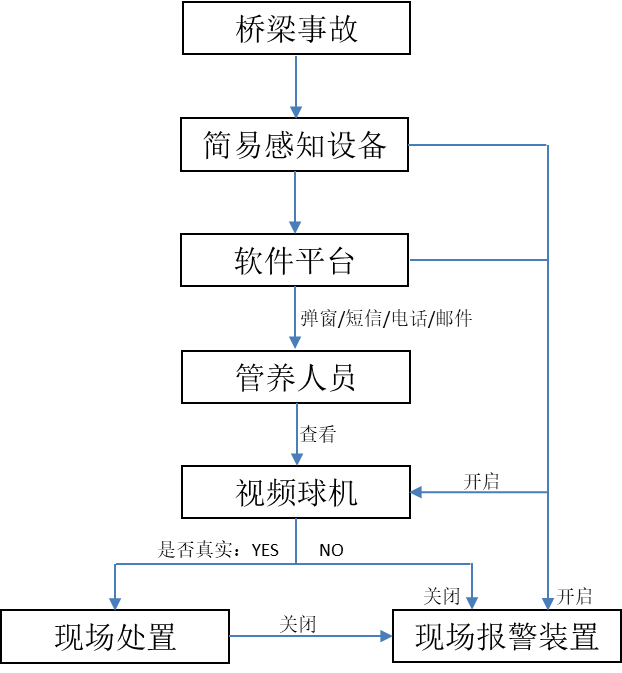
守護公路安全! 中海達推出輕量化監測簡易感知方案
英創匯智入選高工智能汽車硬科技創新TOP50
中海達推出輕量化監測簡易感知解決方案
英創匯智榮獲2024年度汽車制動創新技術“制尚獎”
助盲環境感知裝置設計方案





 工商網監
工商網監
評論