") 從另一個(gè)維度深入探討充電樁設(shè)計(jì)
從另一個(gè)維度深入探討充電樁設(shè)計(jì)
在本系列文章的第一至第四部分中[1-4],我們從硬件角度分享并廣泛介紹了25 kW電動(dòng)汽車充電樁的開發(fā)。圖1代表到目前為止所討論的系統(tǒng)。
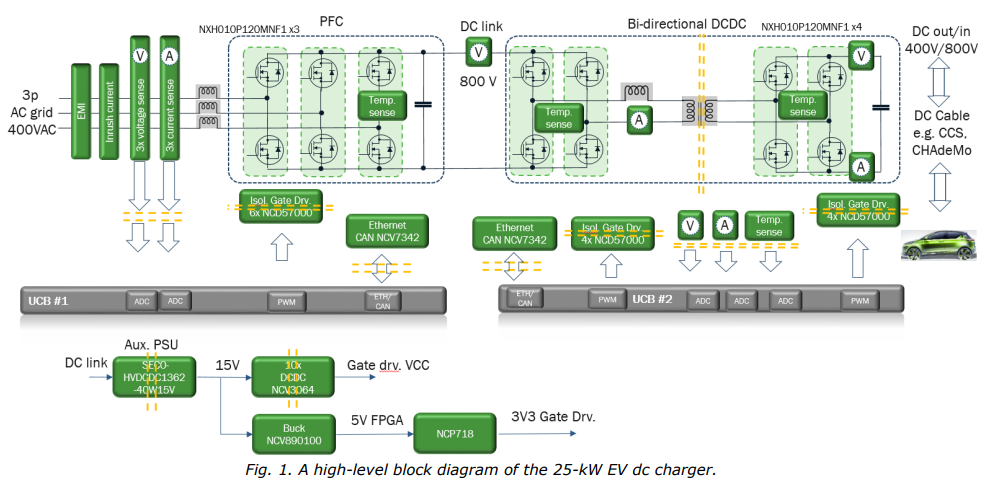
圖1.25kW電動(dòng)汽車直流充電樁的高級(jí)框圖。
第五部分則將從另一個(gè)維度深入探討充電樁設(shè)計(jì),我們將針對(duì)此類系統(tǒng)的控制策略和算法實(shí)現(xiàn)進(jìn)行探討,并提供實(shí)用見解。
我們的目的不是討論控制理論,而是提供第一手詳細(xì)信息,介紹開發(fā)團(tuán)隊(duì)所采取的控制硬件和軟件開發(fā)的有益方法,幫助加快固件開發(fā)和驗(yàn)證過程。這些信息既適用于ARM控制器上的狀態(tài)機(jī),也適用于FPGA上的主控制算法,我們稍后會(huì)詳細(xì)介紹。
同時(shí),此處描述的特定開發(fā)過程可確保最大限度地減少錯(cuò)誤,并能及早發(fā)現(xiàn)錯(cuò)誤,甚至可在提供或設(shè)計(jì)原型硬件之前。在以下章節(jié)中,我們將介紹實(shí)現(xiàn)這種方法的步驟和工具(MathWorks和Xilinx)、功率因數(shù)校正(PFC)的狀態(tài)機(jī)和算法模塊,以及DAB轉(zhuǎn)換器的主算法模塊。
控制策略的開發(fā)過程
PFC控制軟件的總體架構(gòu)如圖2所示。該設(shè)計(jì)的核心是Xilinx的Zynq 7000 SoC,它包含ARM內(nèi)核和FPGA內(nèi)核。Zynq 7000安裝在通用控制器板(UCB)上,該板還包含外設(shè)、ADC、多個(gè)存儲(chǔ)器板以及SoC和其他元件所需的電源樹。[5]
首先,ARM內(nèi)核運(yùn)行狀態(tài)機(jī)(固件中的高級(jí)例程)以及其他輔助任務(wù),包括通信協(xié)議、保護(hù)功能等。其次,F(xiàn)PGA充當(dāng)主控制算法的提供者,運(yùn)行驅(qū)動(dòng)轉(zhuǎn)換器的控制環(huán)路,根據(jù)需要處理電源,實(shí)現(xiàn)AC-DC轉(zhuǎn)換、PFC并將電壓升壓至所需的直流鏈路電平。因此,F(xiàn)PGA上的“主算法”是狀態(tài)機(jī)一個(gè)特定狀態(tài),可稱之為穩(wěn)態(tài)。DAB轉(zhuǎn)換器在ARM內(nèi)核和FPGA之間采用相同的任務(wù)分配方式。
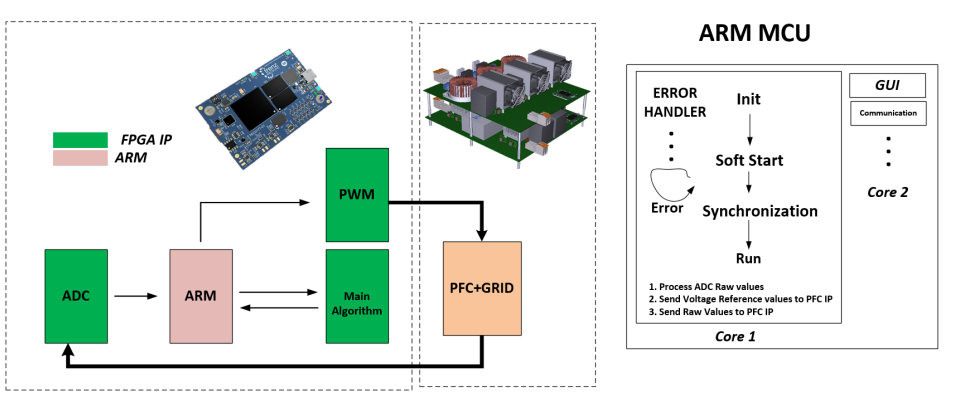
圖2.25 kW PFC轉(zhuǎn)換器控制架構(gòu)概覽。任務(wù)在UCB上的XilinxZynq 7000的FPGA和ARM MCU之間的分配示意圖。DAB轉(zhuǎn)換器的控制架構(gòu)概覽與此相同。
利用基于模型的測(cè)試來(lái)揭示控制系統(tǒng)中的錯(cuò)誤
圖3說(shuō)明了在整個(gè)項(xiàng)目開發(fā)鏈中出現(xiàn)錯(cuò)誤和檢測(cè)到錯(cuò)誤的典型分布情況。可以看到,大多數(shù)錯(cuò)誤是在初期的制定規(guī)格和設(shè)計(jì)階段引入的;但是,它們大多直到測(cè)試后期才被發(fā)現(xiàn)。
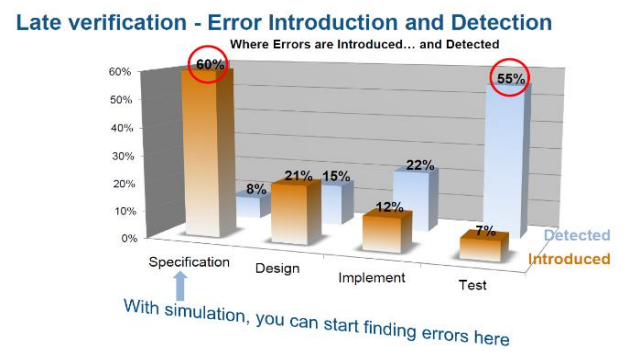
圖3.引入的錯(cuò)誤與檢測(cè)到的錯(cuò)誤。(資料來(lái)源:CliveMaxfield和KuhooGoyal的著作,《EDA:電子學(xué)的起點(diǎn)》。)
為了解決圖3中呈現(xiàn)的現(xiàn)象,我們采用了一個(gè)開發(fā)過程,其目的是在開發(fā)的早期階段檢測(cè)到大部分這些錯(cuò)誤。如果實(shí)施得當(dāng),從項(xiàng)目資源和時(shí)間表的角度來(lái)看,這種方法會(huì)帶來(lái)一些優(yōu)勢(shì),包括:
最大限度地降低額外所需硬件迭代的風(fēng)險(xiǎn)。
在硬件準(zhǔn)備就緒之前,可在很大程度上優(yōu)化控制系統(tǒng)和轉(zhuǎn)換器性能。
加速硬件評(píng)估階段,最大限度地減少必需對(duì)硬件進(jìn)行的調(diào)整。在原型板生產(chǎn)期間,已經(jīng)執(zhí)行了大量工作。
為此,安森美(onsemi)固件和控制工程師采取基于模型的測(cè)試方法,該方法充分利用了MATLAB工具和生態(tài)系統(tǒng)[6]。該方法的成功實(shí)施取決于四大關(guān)鍵支柱,開發(fā)人員需要解決以下問題:
代表性模型,需確保在可行仿真時(shí)間內(nèi),仿真系統(tǒng)響應(yīng)與實(shí)際系統(tǒng)響應(yīng)高度匹配。對(duì)于PFC電源仿真,在模型精度和仿真時(shí)間之間采取了如第三部分所述的類似折衷。
在我們的仿真過程和仿真模型中編譯和驗(yàn)證我們的固件C代碼(狀態(tài)機(jī))。因此,驗(yàn)證發(fā)生在仿真階段,而不是硬件評(píng)估階段。
FPGAIP內(nèi)核可從經(jīng)過驗(yàn)證的模型中自動(dòng)合成生成。這消除了手動(dòng)編碼錯(cuò)誤,并支持高級(jí)優(yōu)化以最小化FPGA內(nèi)核面積,同時(shí)滿足時(shí)序約束。
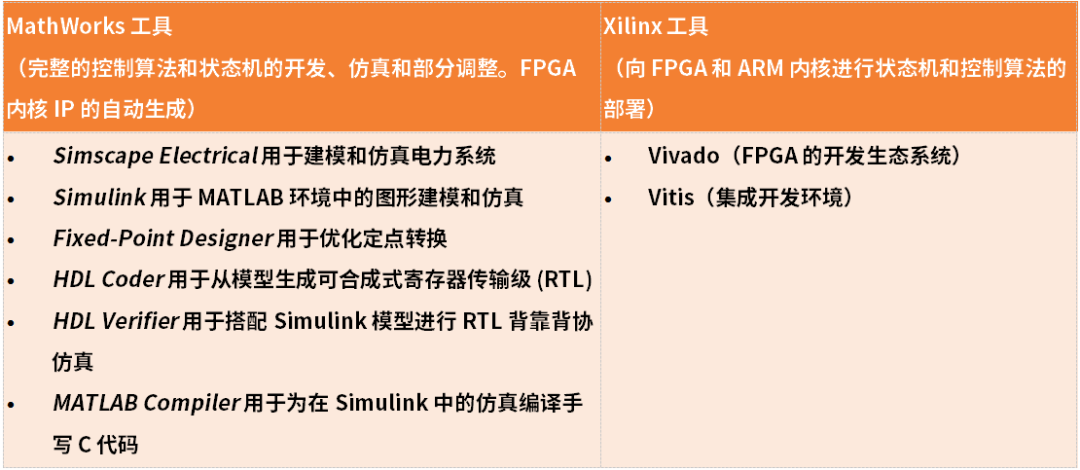
為了加速這些特性的實(shí)現(xiàn),我們充分利用了以下工具的優(yōu)點(diǎn)(如表1所示)。
表1:安森美工程團(tuán)隊(duì)使用的開發(fā)和仿真工具,用于開發(fā)、仿真、部署和測(cè)試25 kW快速直流電動(dòng)汽車充電樁設(shè)計(jì)的固件。
一步一個(gè)腳印。如何開發(fā)仿真模型?
圖4描繪了固件開發(fā)和執(zhí)行過程的簡(jiǎn)化流程圖,按表2中總結(jié)的三個(gè)主要階段進(jìn)行劃分。在本文中,只深入討論仿真模型開發(fā),這是最重要的一個(gè)階段。
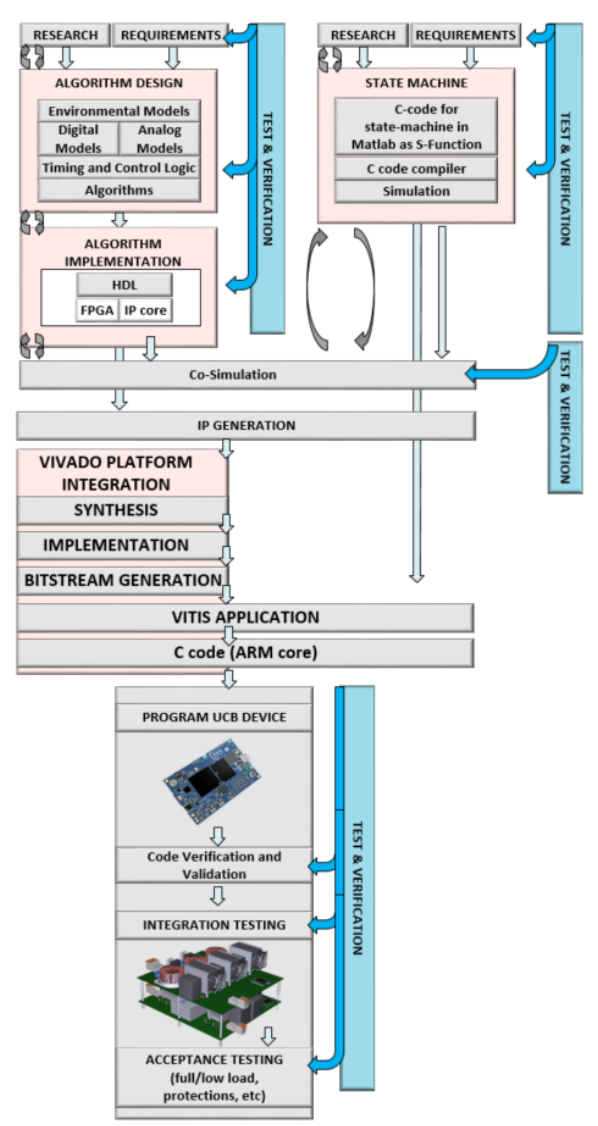
圖4.25 kW快速直流充電樁固件開發(fā)流程圖。
表2:固件開發(fā)過程的各個(gè)階段。
仿真模型開發(fā)階段包括開發(fā)用于驗(yàn)證系統(tǒng)控制算法的仿真模型(或仿真模塊)。本項(xiàng)目中包含的最重要的模塊是:
將在ARM內(nèi)核上運(yùn)行的C代碼(狀態(tài)機(jī)),通過S函數(shù)塊導(dǎo)入以用于仿真
轉(zhuǎn)換器的控制算法(控制環(huán)路)
電源轉(zhuǎn)換器,用于對(duì)硬件進(jìn)行建模
硬件接口,用于對(duì)硬件中的ADC電路進(jìn)行建模
設(shè)備模塊、用于PFC的交流設(shè)備和用于DAB的直流設(shè)備。
在此開發(fā)階段,我們使用“輕”模型(不含改進(jìn)細(xì)節(jié)的代表性模型),這使我們能夠在各種條件(電網(wǎng)阻抗、電流命令——取決于輸出功率水平的變化——以及其他條件)下運(yùn)行多種情況/場(chǎng)景,驗(yàn)證控制器對(duì)許多不同場(chǎng)景的響應(yīng)。因此,在此階段應(yīng)避免使用開關(guān)模型,因?yàn)檫@些模型包含非常多的細(xì)節(jié),運(yùn)行模型需要花費(fèi)大量時(shí)間——我們?cè)诒鞠盗形恼碌谌糠值碾娫捶抡嬷袑?duì)此已經(jīng)有所了解。
我們使用平均開關(guān)等效模型[7]作為替代方案,該模型允許使用FPGAIP內(nèi)核構(gòu)建仿真模塊。同時(shí),我們保留了硬件的所有重要/有影響的特性,以確保仿真的完整性,例如轉(zhuǎn)換器壓降效應(yīng)、噪聲測(cè)量、PWM傳輸和模數(shù)延遲等。
使用MATLAB生成IP的步驟
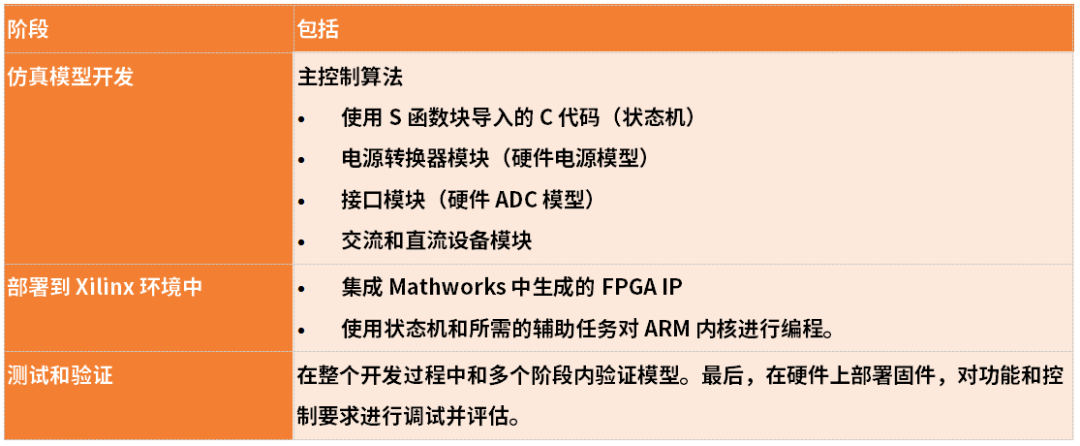
本章節(jié)進(jìn)入到詳情部分,將介紹實(shí)現(xiàn)特定仿真模型的關(guān)鍵步驟以及如何充分利用MATLAB環(huán)境所提供的功能。圖5顯示了具有表1中介紹的元件的通用電能轉(zhuǎn)換系統(tǒng)的簡(jiǎn)化表示。
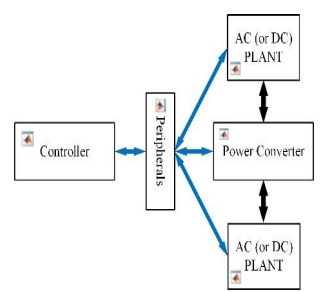
圖5.通用電能轉(zhuǎn)換系統(tǒng)的簡(jiǎn)化表示(并非特指25 kW直流充電樁)。
“電源轉(zhuǎn)換器”是模型的核心元件(我們的硬件代表),“控制器”是相關(guān)的主算法模塊,也是我們正在開發(fā)和評(píng)估的算法模塊。最終,通過使用MATLAB仿真生態(tài)系統(tǒng)提供的自動(dòng)化工具,該算法模塊將轉(zhuǎn)換成FPGAIP內(nèi)核本身。
我們的團(tuán)隊(duì)在模型開發(fā)階段使用了一系列的六個(gè)步驟,貫穿至最終的IP生成。這些步驟的概覽參見圖6中的簡(jiǎn)化流程圖,其簡(jiǎn)要說(shuō)明如下文所示。
●-步驟1:我們采用雙精度浮點(diǎn)開發(fā)模型,而電源轉(zhuǎn)換器則使用平均模型。如上一章節(jié)所述,在此階段,開發(fā)的模型起著重要作用,既要盡可能輕以允許合理的仿真運(yùn)行時(shí)間,又要足夠準(zhǔn)確以反映系統(tǒng)的實(shí)際行為。
●-步驟2:我們使用MATLAB提供的自動(dòng)化工具來(lái)生成系統(tǒng)的定點(diǎn)等效模型。此任務(wù)采用的工具是MATLABFixedPointDesigner。
●-步驟3:將雙精度變換為定點(diǎn)精度后,運(yùn)行一次驗(yàn)證仿真,以確保定點(diǎn)轉(zhuǎn)換不會(huì)影響系統(tǒng)的工作行為。
●-步驟4:驗(yàn)證后,加入要在UCB控制器的ARM內(nèi)核中運(yùn)行的狀態(tài)機(jī)。允許在Simulink模型中模擬手寫C代碼的工具是S函數(shù)。此時(shí),我們應(yīng)該能夠在合理的仿真運(yùn)行時(shí)間內(nèi)針對(duì)多種情況和各種條件測(cè)試控制器。在這個(gè)過程中,可能會(huì)發(fā)生各種重要的子任務(wù)。例如,比例積分控制器增益的驗(yàn)證、控制器負(fù)載階躍響應(yīng)的評(píng)估、狀態(tài)機(jī)的過電流反應(yīng)以及錯(cuò)誤處理等。
●-步驟5:在生成FPGAIP內(nèi)核之前,我們強(qiáng)烈建議針對(duì)選定的情況/場(chǎng)景運(yùn)行一些仿真,將轉(zhuǎn)換器的平均模型替換為開關(guān)模型。這個(gè)過程相當(dāng)耗時(shí),應(yīng)對(duì)極少數(shù)的仿真情況進(jìn)行重復(fù)。然而,重要的是要確保控制器免受轉(zhuǎn)換器開關(guān)行為所引入的非線性的影響。
●-步驟6:對(duì)所開發(fā)的算法有足夠的信心后,我們現(xiàn)在可以使用自動(dòng)化工具生成FPGAIP內(nèi)核。這個(gè)過程顯著減少了編程錯(cuò)誤,實(shí)現(xiàn)了面積優(yōu)化的可合成式RTL,并且滿足時(shí)序約束。
圖6.仿真模型開發(fā)階段的六步驟流程圖。為了便于表示,該流程圖中省略了圖5中的“外設(shè)”模塊。它所在的位置以及與其他模塊的連接與圖5中的相同。
PFC控制策略:狀態(tài)機(jī)和控制環(huán)路
本章節(jié)將詳細(xì)介紹PFC的控制策略,包括狀態(tài)機(jī)以及控制算法(控制環(huán)路)。狀態(tài)機(jī)在UCB的ARM內(nèi)核上運(yùn)行,控制算法在狀態(tài)機(jī)的“直流總線VOLTAGE_CONTROL”狀態(tài)下運(yùn)行,并在FPGA芯片上實(shí)現(xiàn)。
在接下來(lái)的章節(jié)中,我們將提供有關(guān)狀態(tài)機(jī)和算法功能的更多詳細(xì)信息。圖7提供了PFC狀態(tài)機(jī)概覽,其中“直流總線VOLTAGE_CONTROL”狀態(tài)以綠色突出顯示,在此狀態(tài)下控制環(huán)路和FPGA將接管控制并運(yùn)行主算法功能。
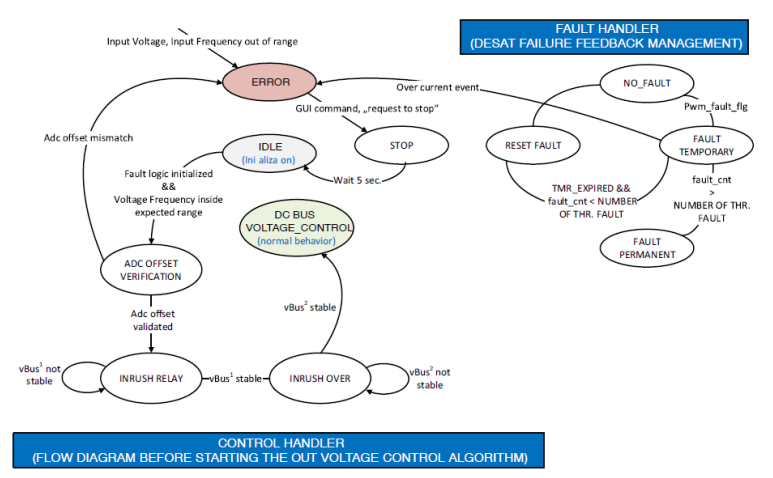
圖7.PFC轉(zhuǎn)換器狀態(tài)機(jī)概覽。
當(dāng)向充電樁的輸入連接器提供50 Hz的三相電壓時(shí),由于PFC拓?fù)涞男再|(zhì),輸出總線電容電壓會(huì)升高。由于每個(gè)MOSFET上都存在寄生續(xù)流二極管,帶有MOSFET的無(wú)橋PFC保證了從輸入到輸出的電流路徑。
當(dāng)MOSFET全部關(guān)斷時(shí),電路板簡(jiǎn)化為三相二極管橋。整流后的輸入交流電壓將根據(jù)電源電壓幅度和MOSFET體二極管的正向電壓,被設(shè)置為定義的電平。然而,期望在輸入端至少提供一個(gè)最小交流電壓。因此,兩個(gè)不同線路上的電阻用作浪涌電流限制器。
一旦總線電壓達(dá)到230 V,主輔助電源開始工作。該電源與一系列DC-DC穩(wěn)壓器一起,生成為數(shù)字和模擬電路供電所需的其他電壓電平。有關(guān)PFC功能的更多詳細(xì)信息,請(qǐng)參閱安森美AND9957/D車載充電樁PFC轉(zhuǎn)換器應(yīng)用筆記[8],其中的實(shí)施策略與此25 kW直流充電樁項(xiàng)目相同。
ARM內(nèi)核上的PFC狀態(tài)機(jī)實(shí)現(xiàn)
如上所述,PFC的狀態(tài)機(jī)在UCB的ARM內(nèi)核上運(yùn)行。其順序從圖7中所示的IDLE模塊開始,然后進(jìn)入ADC通道中的偏移電壓驗(yàn)證和輸入電壓監(jiān)控和檢測(cè)。這些用于確定三個(gè)電壓的頻率和相位角。該相位角將作為系統(tǒng)實(shí)現(xiàn)功率因數(shù)校正的基準(zhǔn)。
當(dāng)直流總線電壓達(dá)到平坦穩(wěn)定狀態(tài)時(shí),PFC控制器向繼電器發(fā)送指令,旁路浪涌電阻并允許輸出總線電壓進(jìn)一步升高。但是,電壓增量將低于整流后的輸入電壓幅度√6?VPHrms。PFC控制器將等到總線電壓再次平坦,以便開始控制總線電壓,達(dá)到800 V的目標(biāo)值。不會(huì)一步達(dá)到目標(biāo)值,它跟隨一個(gè)平滑的斜坡發(fā)生器,使總線電壓值按照參數(shù)化的斜坡上升到最終的800 V。
PFC只實(shí)現(xiàn)了一種硬件保護(hù),利用NCD57000DWR2G柵極驅(qū)動(dòng)器的DESAT功能防止過電流事件。但是,DESAT硬件保護(hù)可以與軟件保護(hù)相結(jié)合,生成到NAND門的單端輸入,從而為PWM生成提供硬件停止。
只能通過GUI發(fā)送的復(fù)位命令或通過斷電/上電序列來(lái)復(fù)位故障條件,這兩種方式分別代表硬件/軟件復(fù)位。有關(guān)PFC功能的更多詳細(xì)信息,請(qǐng)參見參考文獻(xiàn)8,它所描述的實(shí)施策略與此25 kW直流充電樁項(xiàng)目相同。
FPGA上的PFC主算法和控制環(huán)路
圖8說(shuō)明了作為完整仿真模型一部分的PFC控制模塊。PFC算法使用七個(gè)輸入和三個(gè)輸出(概述參見表3)。作為本項(xiàng)目的一部分,我們將運(yùn)行和測(cè)試不同的調(diào)制策略,以評(píng)估哪一種策略能在效率和諧波失真方面產(chǎn)生更好的結(jié)果。該控制策略與參考文獻(xiàn)8中描述的策略相同。
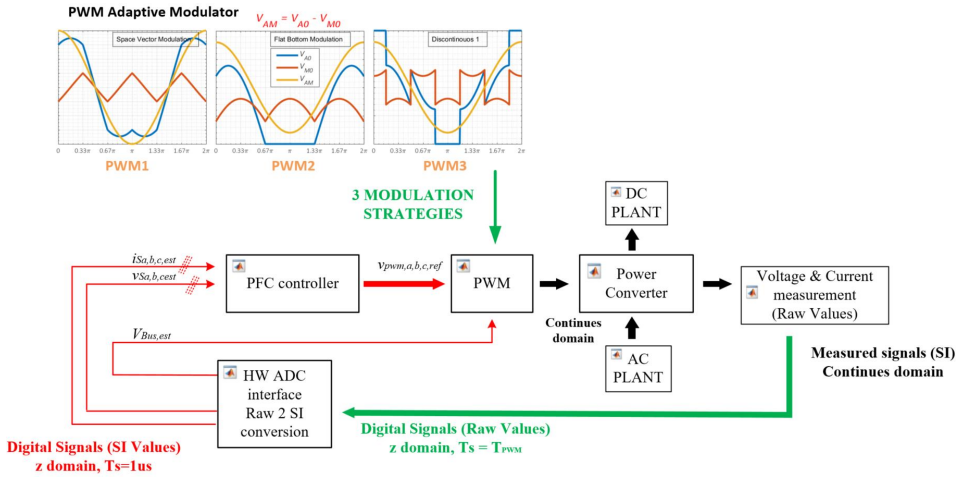
圖8.PFC控制算法的高級(jí)框圖。
表3:PFC控制算法的輸入和輸出參數(shù)。
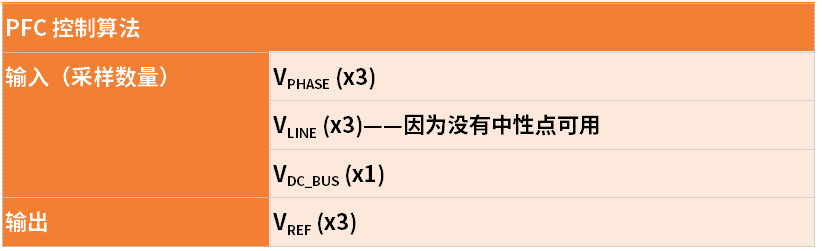
圖9作為更深入的研究,詳細(xì)顯示了構(gòu)成PFC算法的模塊和關(guān)系。VLINE電壓用于確定交流電壓相量的實(shí)際位置。然后,使用角度θ將電流相位延遲調(diào)節(jié)到0°,這是PFC的主要目標(biāo)。電壓位置用于通過克拉克和帕克變換,從靜止ABC系統(tǒng)參考轉(zhuǎn)換到旋轉(zhuǎn)DQ坐標(biāo)系(對(duì)于PFC,D軸表示相電壓相量的幅值)。
由于角度θ已知,所有電量都可以在DQ系統(tǒng)中表示;這種簡(jiǎn)化操作確保能夠使用簡(jiǎn)單的比例積分(PI)調(diào)節(jié)器。PI的增益調(diào)整取決于待調(diào)節(jié)設(shè)備的傳遞函數(shù)。當(dāng)可提供一個(gè)常數(shù)作為參考量時(shí),PI調(diào)節(jié)器確實(shí)可以有效地將誤差調(diào)節(jié)為零,但這些調(diào)節(jié)器不能調(diào)節(jié)交流參考量。
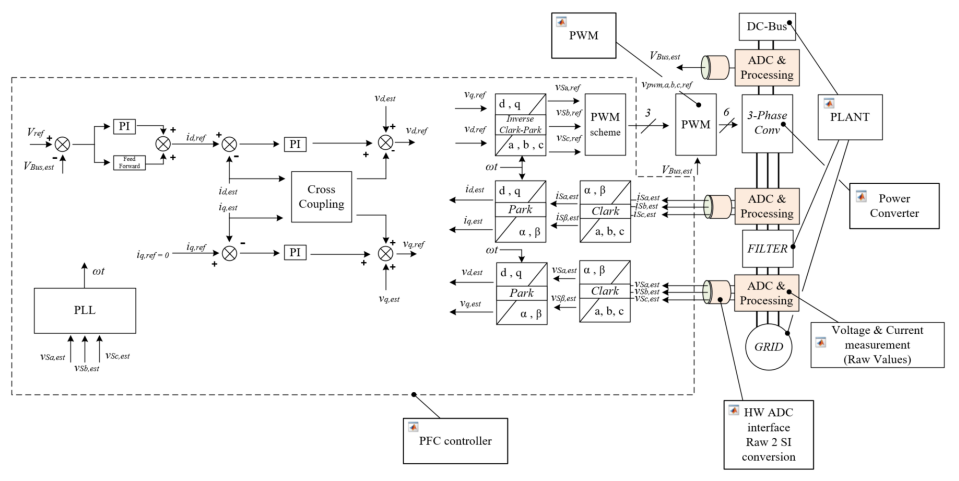
圖9.PFC控制算法的詳細(xì)框圖。
在任何情況下,PI調(diào)節(jié)器都需要某種校準(zhǔn),以確保適當(dāng)?shù)南到y(tǒng)穩(wěn)定性。通常期望電流環(huán)路(內(nèi)部)的響應(yīng)較快,外部環(huán)路(電壓)的響應(yīng)較慢。此時(shí)值得注意的是,電流控制環(huán)路與PWM同步運(yùn)行。同步程序確保ADC外設(shè)可在PWM載波的準(zhǔn)確時(shí)間實(shí)例中被觸發(fā),以確保在測(cè)量的電流量中自然濾除開關(guān)紋波。
需補(bǔ)充說(shuō)明的是,由于存在固有的ADC測(cè)量延遲,PWM頻率并不完全獨(dú)立于控制頻率,該延遲應(yīng)當(dāng)足夠小,以保證在開關(guān)周期內(nèi)及時(shí)執(zhí)行PFC算法。由于FPGAPFC控制器的延遲非常低,約為150納秒,因此PWM頻率的主要限制因素是ADC采樣和轉(zhuǎn)換時(shí)間。一旦有了ADC的數(shù)量,控制實(shí)現(xiàn)就很簡(jiǎn)單了。
已使用MATLAB對(duì)PFC的主要功能進(jìn)行了廣泛的測(cè)試,如“使用MATLAB生成IP的步驟”章節(jié)中所述。使用的Simulink主模型如圖10所示(該模型中唯一缺少的部分是用于測(cè)試固件狀態(tài)機(jī)的S函數(shù))。圖中對(duì)所使用的模塊進(jìn)行了解釋。
請(qǐng)注意,這一級(jí)的模型主要由Simulink模塊組成,包括三相電源轉(zhuǎn)換器的平均模型。PFC的電網(wǎng)和互連濾波器利用
SimscapeElectrical庫(kù)中的模型,而直流負(fù)載和電容(直流裝置)的建模則是通過LaplaceSimulink模塊的幫助。該模型很輕,可使用傳統(tǒng)的筆記本電腦支持合理的仿真時(shí)間,實(shí)現(xiàn)0.1秒的仿真只需不到1分鐘的時(shí)間。
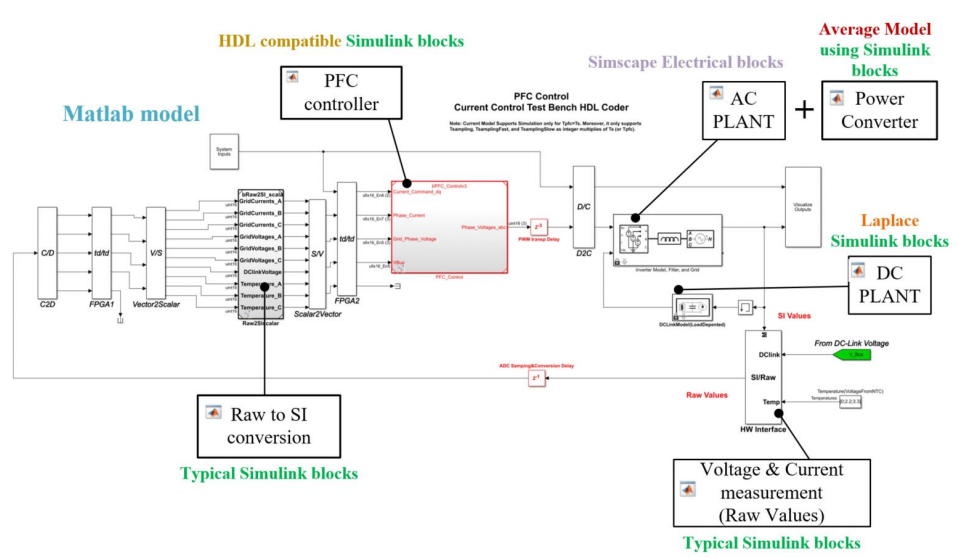
圖10.主PFC控制器Simulink模型。直流設(shè)備模塊(簡(jiǎn)單的電阻和電容)用作測(cè)試PFC算法功能的負(fù)載,并不代表實(shí)際DAB轉(zhuǎn)換器的模型。
DAB轉(zhuǎn)換器控制策略和磁通平衡技術(shù)
DAB轉(zhuǎn)換器控制策略的實(shí)施遵循與PFC類似的過程。在本章節(jié)中,我們將討論轉(zhuǎn)換器的控制算法以及磁通平衡技術(shù)。在撰寫本文時(shí),需要重新設(shè)計(jì)轉(zhuǎn)換器的Simulik模型,以便為HDL編碼器做好準(zhǔn)備,并且DAB的平均模型尚未最終確定(我們尚處于圖4的步驟6中)。
從控制算法開始,在可用控制技術(shù)中,最著名的技術(shù)可能是固定頻率相移技術(shù)。圖11顯示了這些技術(shù)的分類,其中單相移(SPS)是最簡(jiǎn)單的一種。事實(shí)上,控制器的簡(jiǎn)單性正是該技術(shù)的主要優(yōu)點(diǎn),但其代價(jià)是轉(zhuǎn)換器中電流循環(huán)的增加,以及在更嚴(yán)格的工作范圍內(nèi)才可能實(shí)現(xiàn)零電壓開關(guān)(ZVS)。這兩個(gè)缺點(diǎn)肯定會(huì)影響系統(tǒng)的效率。
基于SPS的兩種替代方案是擴(kuò)展相移(EPS)和雙相移(DPS)技術(shù),它們能夠更有效地利用轉(zhuǎn)換器,減少了循環(huán)電流并擴(kuò)展了ZVS的工作范圍。但這些改進(jìn)的代價(jià)是系統(tǒng)需要添加額外控制,增加了復(fù)雜性。
最后,三重相移(TPS)技術(shù)是SPS、EPS和DPS的統(tǒng)一版本。從這個(gè)角度來(lái)看,SPS、EPS和DPS都可以從TPS派生得到,可以視為TPS的特例或子情況。圖12-14分別說(shuō)明了SPS、EPS和DPS的工作原理。
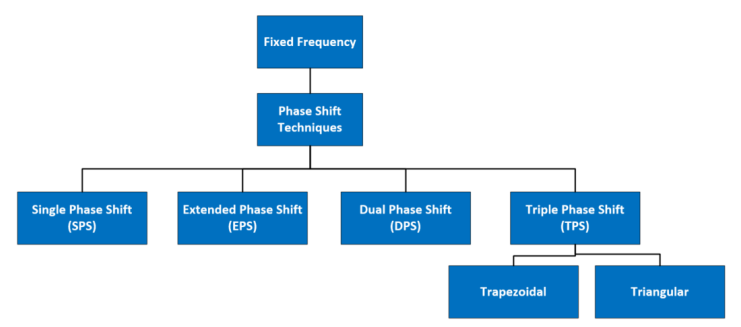
圖11.不同相移技術(shù)的分類。三重相移(TPS)是其他技術(shù)的統(tǒng)一版本,其中的每一種技術(shù)都可以視為TPS的子情況。
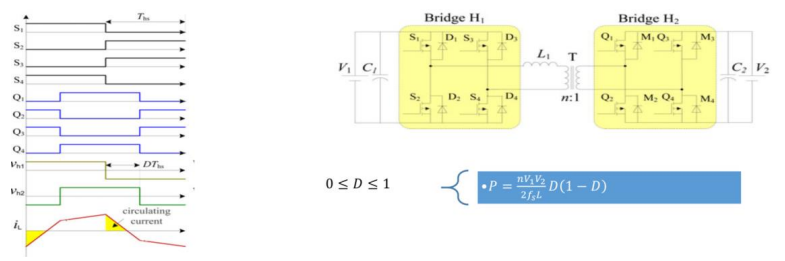
圖12.單相移(SPS)技術(shù)。(資料來(lái)源:“用于高頻鏈路功率轉(zhuǎn)換系統(tǒng)的雙有源橋隔離型雙向DC-DC轉(zhuǎn)換器概述”[9])
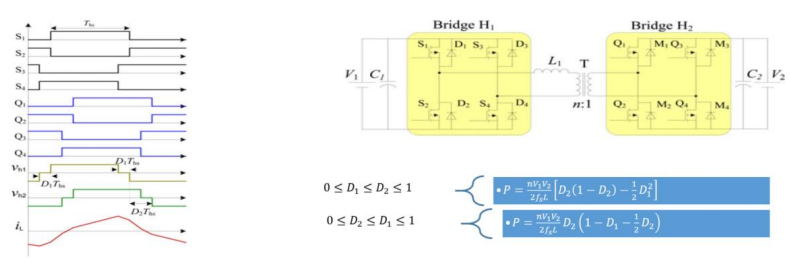
圖13.雙相移(DPS)技術(shù)。(資料來(lái)源:“用于高頻鏈路功率轉(zhuǎn)換系統(tǒng)的雙有源橋隔離型雙向DC-DC轉(zhuǎn)換器概述”[9])
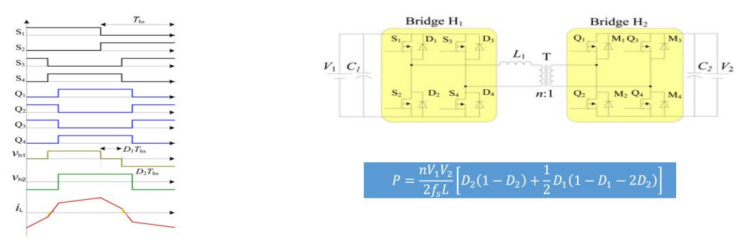
圖14.擴(kuò)展相移(EPS)技術(shù)。(資料來(lái)源:“用于高頻鏈路功率轉(zhuǎn)換系統(tǒng)的雙有源橋隔離型雙向DC-DC轉(zhuǎn)換器概述”[9])
在本系列文章的第四部分中,我們注意到,DAB轉(zhuǎn)換器的電源仿真是使用SPS進(jìn)行的。稍后,我們將在硬件原型上測(cè)試更先進(jìn)的技術(shù),并評(píng)估每種技術(shù)將帶來(lái)的優(yōu)勢(shì)。
最重要的可能改進(jìn)將是轉(zhuǎn)換器效率提升。此外,還有可能降低變壓器中的勵(lì)磁峰值電流(IM),這將允許使用更緊湊的變壓器和電感。
控制算法和通量平衡模型模塊
DAB的控制原理如圖15所示。控制器的目標(biāo)是為電池生成所需的輸出電壓或電流。
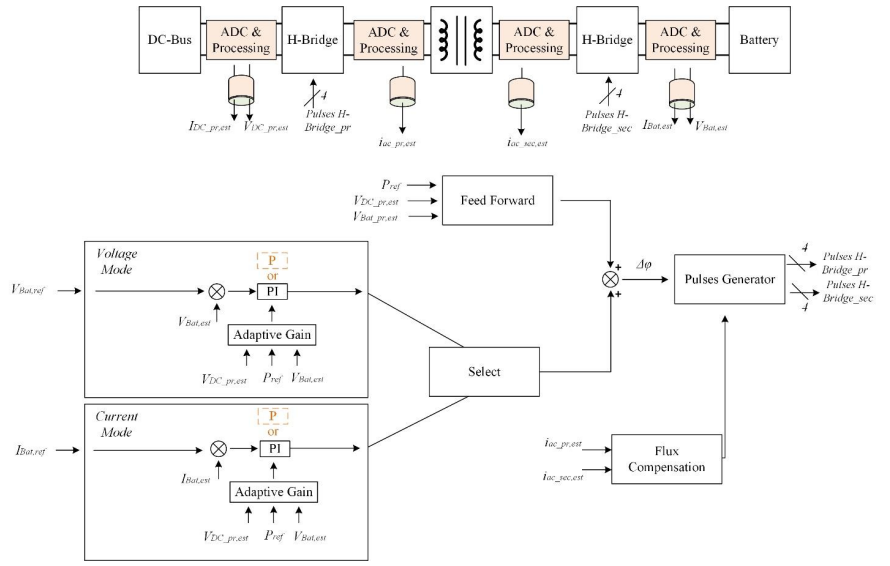
圖15.DAB控制算法的框圖。變壓器磁通平衡算法也包含在其中。
基本概念很簡(jiǎn)單:將測(cè)得的輸出電壓(或電流)和目標(biāo)值都饋送至輸入PI控制器。PI控制器的輸出試圖通過產(chǎn)生所需的Δφ(即DAB的初級(jí)交流電壓和次級(jí)交流電壓之間的角度相位差),消除它們之間的誤差,以驅(qū)動(dòng)初級(jí)側(cè)和次級(jí)側(cè)的PWM。由于輸出電容的存在,控制環(huán)路很慢,但考慮到電池充電的緩慢動(dòng)態(tài)行為,這不是問題。
需補(bǔ)充說(shuō)明的是,自適應(yīng)PI增益對(duì)補(bǔ)償陡峭的Vout/ΔΦ斜率的重要性。可使用純比例控制器(相對(duì)PI而言)作為替代方案。不過,工程團(tuán)隊(duì)需要對(duì)這方面進(jìn)行進(jìn)一步研究。
DAB控制算法中一個(gè)值得詳細(xì)闡述的有趣部分是通量平衡功能。這項(xiàng)技術(shù)在第四部分中介紹過,它可以補(bǔ)償換流變壓器中的任何直流分量,防止勵(lì)磁電流的累積和磁芯飽和。
圖16顯示了用于在25 kW DAB變壓器中實(shí)現(xiàn)磁通補(bǔ)償概念的Simulink模型。該模塊具有三個(gè)輸入和一個(gè)輸出。初級(jí)和次級(jí)變壓器電流和同步(sync.)脈沖是該模塊的輸入。該模塊的輸出用于調(diào)整變壓器初級(jí)側(cè)PWM的占空比。

圖16.磁通補(bǔ)償框圖。
磁通平衡模塊由變壓器的次級(jí)PWM同步脈沖觸發(fā)(在轉(zhuǎn)換器的開關(guān)頻率下),這意味著饋入模塊的交流電流所需的采樣頻率應(yīng)該(至少)是轉(zhuǎn)換器開關(guān)頻率的兩倍。具體來(lái)說(shuō),同步脈沖是用于驅(qū)動(dòng)次級(jí)側(cè)第一個(gè)橋臂的高壓側(cè)開關(guān)的那些PWM的脈沖。然后借助采樣的輸入電流,通過簡(jiǎn)單的計(jì)算得到DAB變壓器的勵(lì)磁峰-峰值電流。
隨后,由相同的同步脈沖觸發(fā)采樣保持(S&H)電路,計(jì)算要復(fù)制的勵(lì)磁電流的開關(guān)平均值。最后,將估計(jì)的勵(lì)磁平均電流饋送到比例(P)控制器,該控制器將生成調(diào)整初級(jí)側(cè)PWM占空比的命令。圖17顯示了在仿真中實(shí)現(xiàn)的通量平衡算法的功能。
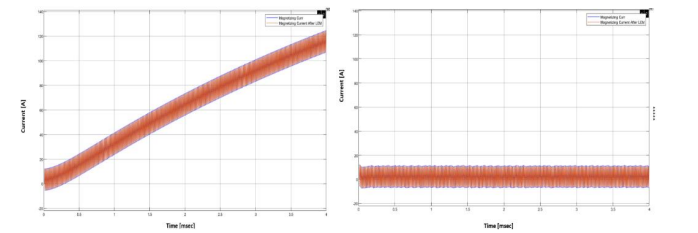
圖17.當(dāng)DAB的磁通補(bǔ)償算法無(wú)效(左)和有效(右)時(shí),仿真的變壓器勵(lì)磁電流(IM)。當(dāng)沒有運(yùn)行磁通平衡技術(shù)時(shí),剩余直流電流會(huì)在每個(gè)開關(guān)周期內(nèi)累積,最終會(huì)使磁芯飽和。
有效實(shí)施磁通平衡技術(shù)的一個(gè)關(guān)鍵因素是所需的電流采集帶寬。如上所述,待測(cè)和待作用電流的開關(guān)頻率為100 kHz,因此系統(tǒng)至少應(yīng)該能夠在200 kHz下進(jìn)行測(cè)量。所以值得運(yùn)行仿真,以確保所選電流傳感器不會(huì)引入明顯的測(cè)量誤差,從而破壞磁通補(bǔ)償實(shí)施。
所選電流傳感器(LEM)指定帶寬為300 kHz。必須考慮到,當(dāng)采樣頻率接近300 kHz時(shí),會(huì)出現(xiàn)增益衰減,并且與任何采集系統(tǒng)一樣,可能會(huì)出現(xiàn)相位滯后。因此,盡管300kHz乍看之下似乎提供了足夠的空間,但還是建議運(yùn)行仿真。使用/不使用有限LEM帶寬的采樣電流如圖18和19所示。(請(qǐng)注意,在本例中,我們尚未激活磁通補(bǔ)償,因此勵(lì)磁電流增長(zhǎng)非常大。)
在圖19中,可以觀察到幅度和相位存在非常小的誤差,但幾乎可以忽略不計(jì)。算法中包含的兩次采樣方法(每個(gè)開關(guān)周期測(cè)量?jī)纱坞娏?也會(huì)有助于減輕誤差。無(wú)論是哪種情況,我們已經(jīng)在圖17中看到磁通平衡可正常工作。
下示仿真應(yīng)該在圖17中給出的結(jié)果之前運(yùn)行或同時(shí)運(yùn)行。因此,可以使用帶寬約為300 kHz的傳統(tǒng)LEM傳感器。圖20說(shuō)明了估計(jì)的開關(guān)平均電流、實(shí)際勵(lì)磁電流(IM)以及同步脈沖。
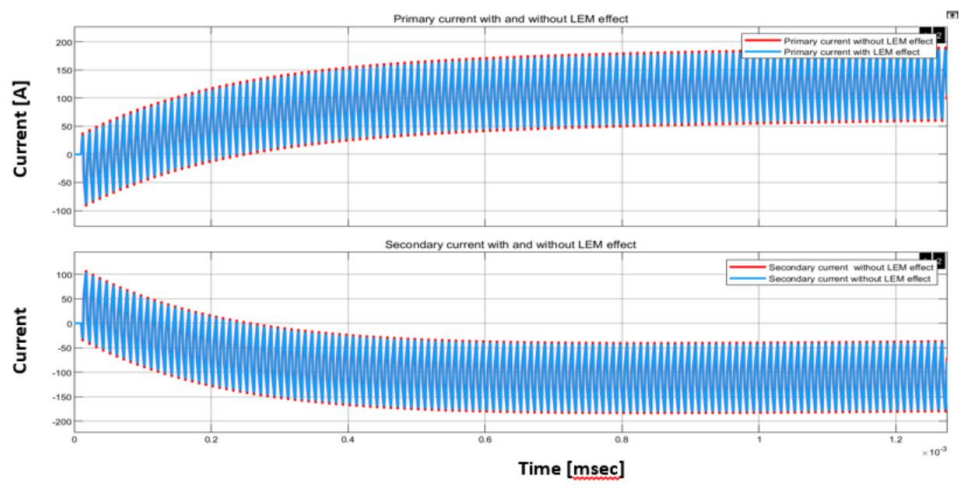
圖18.帶/不帶LEM電流傳感器效應(yīng)的初級(jí)和次級(jí)電流測(cè)量。磁通平衡算法在此仿真中不工作。
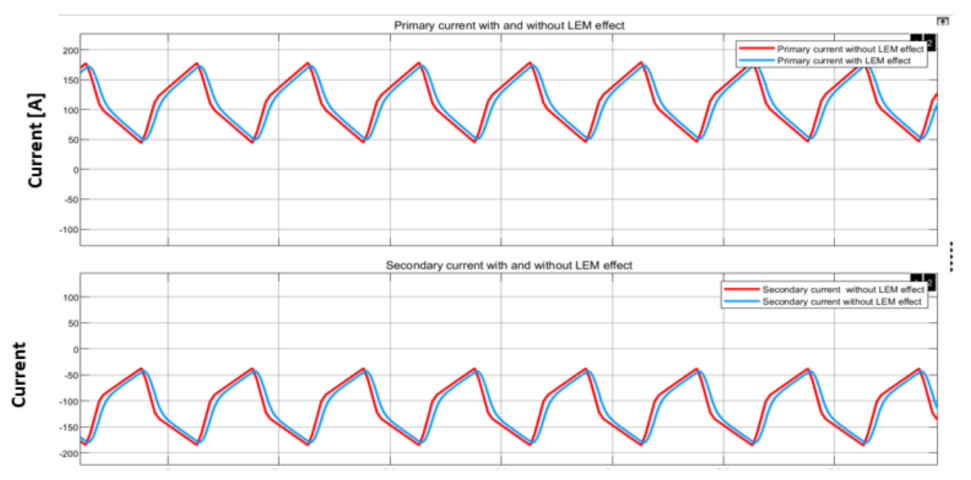
圖19.帶/不帶LEM電流傳感器效應(yīng)的初級(jí)和次級(jí)電流測(cè)量。
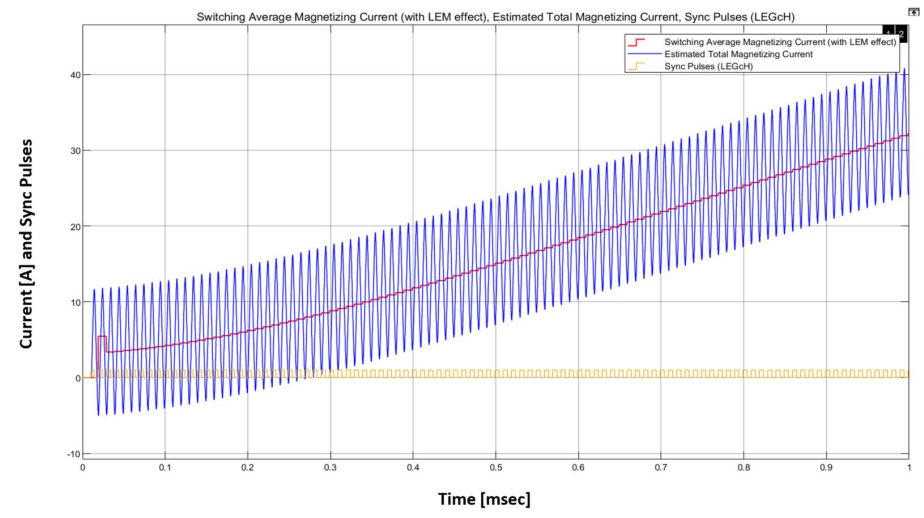
圖20.估計(jì)的總勵(lì)磁電流(帶LEM電流傳感器效應(yīng))、估計(jì)的開關(guān)平均值(帶LEM傳感器效應(yīng))和同步脈沖。磁通平衡算法在此仿真中不工作。
總結(jié)
正如在本討論開始時(shí)所觀察到的,我們?cè)诖瞬扇×伺c本系列文章前幾部分不同的角度,深入研究了控制策略的實(shí)現(xiàn),以及如何對(duì)其優(yōu)化和加速。本文介紹了安森美工程團(tuán)隊(duì)遵循的有益方法,該方法有助于在仿真階段、硬件生產(chǎn)之前,及早調(diào)試和識(shí)別錯(cuò)誤。
此外,此方法加快了將ARM內(nèi)核和FPGA相結(jié)合的混合控制器的控制開發(fā)。最后,它通過在Simulink中創(chuàng)建的仿真模型自動(dòng)生成FPGAIP,為不是FPGA開發(fā)專家的固件工程師使用FPGA提供了便利。毋庸置疑,當(dāng)可以將固件部署到板上并驗(yàn)證實(shí)際完整系統(tǒng)時(shí),則可以進(jìn)行控制算法的實(shí)際驗(yàn)證。
審核編輯 :李倩
-
PFC
+關(guān)注
關(guān)注
47文章
977瀏覽量
106253 -
SiC
+關(guān)注
關(guān)注
29文章
2866瀏覽量
62813 -
控制算法
+關(guān)注
關(guān)注
4文章
166瀏覽量
21757 -
充電樁
+關(guān)注
關(guān)注
147文章
2351瀏覽量
85364
原文標(biāo)題:25 kW SiC直流快充設(shè)計(jì)指南(第五部分):控制算法、調(diào)制方案和反饋
文章出處:【微信號(hào):onsemi-china,微信公眾號(hào):安森美】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
露天充電樁消防設(shè)備:保障電動(dòng)車充電安全的新篇章|廣州電盾智能
充電樁消防數(shù)據(jù)監(jiān)管平臺(tái)與消防棚:構(gòu)建安全充電環(huán)境的雙保險(xiǎn)
新能源電動(dòng)汽車充電樁快速充電技術(shù)研究與應(yīng)用方案
物業(yè)消防充電樁與消防雨棚:構(gòu)建安全便捷的充電環(huán)境
充電樁自動(dòng)測(cè)試系統(tǒng)的原理和應(yīng)用
7kw充電樁用多大電表
淺析充電樁有序充電與配電網(wǎng)需求側(cè)響應(yīng)結(jié)合的優(yōu)異性分析及策略探索
淺談充電樁有序充電與配電網(wǎng)需求側(cè)響應(yīng)結(jié)合的優(yōu)異性分析及策略探索
光伏-直流智能充電樁有序充電策略與應(yīng)用效果
淺談光伏-直流智能充電樁有序充電策略與應(yīng)用效果--安科瑞張?zhí)锾?/a>

交直流充電樁檢測(cè)操作和維護(hù)
【鉑電阻測(cè)溫】充電樁從電源隔離到溫度監(jiān)測(cè)的一體化方案設(shè)計(jì)

揭秘充電樁使用物聯(lián)網(wǎng)卡的重要性






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論