") 無人機遙感技術對高粱生長狀態(tài)的監(jiān)測研究
無人機遙感技術對高粱生長狀態(tài)的監(jiān)測研究
0引 言
高粱是世界第五大農(nóng)作物,是釀造業(yè)和飼料業(yè)的基礎原料,在我國種植廣泛且近幾年的對外依存度較高。全面并準確地獲取高粱的生長狀態(tài)信息對指導高粱的生產(chǎn)、精確的預測產(chǎn)量、評價生產(chǎn)耗能等具有重要的現(xiàn)實意義。然而在無人機遙感技術對高粱生長狀態(tài)的監(jiān)測研究方面還未有大量研究。本文以南通市農(nóng)業(yè)研究實驗基地種植的高粱為研究對象,選取可反應農(nóng)作物長勢的葉面積指數(shù)(LAI)、植被覆蓋度(FVC)為高粱生長參數(shù)的指標,通過多旋翼無人機平臺獲取高粱不同生長階段的遙感圖像,在建立4種典型植被指數(shù)和高粱生長參數(shù) LAI 和FVC 的經(jīng)驗統(tǒng)計回歸模型,確定適用于反應高粱長勢的最優(yōu)植被指數(shù);然后,對比實測和通過無人機遙感圖像獲得的 LAI 和FVC 值,評估無人機遙感評價農(nóng)作物長勢的準確性。
1材料與方法
1.1 試驗區(qū)概況
試驗于南通市農(nóng)業(yè)研究實驗基地進行,基地地勢平坦,土壤類型草甸黑土,土壤質地黏重,前茬大豆,秋整地。高粱品種為紅糯 16,每公頃的保苗株數(shù)為25萬株,播種同時施入種肥300kg/hm2(氮∶磷∶鉀=23:10:12)。施肥、防蟲滅草等均按當?shù)厣a(chǎn)進行,播種及各項農(nóng)事活動均在同一天內完成。
1.2 數(shù)據(jù)獲取
1.2.1 無人機遙感數(shù)據(jù)
本研究采用無人機5通道多光譜相機。相機在120m 的飛行高度時,分辨率( GDS )為8cm,可采集藍、綠、紅、紅邊、近紅外5個光譜波段。在高粱播種到成熟的過程中,選取3個主要生育期開展無人機遙感作業(yè),選擇太陽光強度穩(wěn)定、天氣晴朗無云的天氣,10:00~14:00獲取遙感圖像,試驗日期與對應的生育期如表1所示。3 次 無 人 機 作 業(yè) 時 采 取 同 一 航 線,飛 行 時 間 約 為20min,飛行高度為120m。
表1無人機遙感圖像獲取時間及對應的生育期

1.2.2 地面數(shù)據(jù)采集
地面數(shù)據(jù)采集工作與無人機空中作業(yè)在同一天同一時間段開展,利用植物冠層分析儀,完成研究區(qū)域內的高粱葉面積指 數(shù) LAI 的測量。同時,將數(shù)碼相機安裝在桿子上,在距離地面約3m 的高度俯拍高粱冠層的圖片,每個拍攝點至少拍攝3張照片。
1.3 數(shù)據(jù)處理
對無人機采集的多光譜圖像,首先采用圖像軟件將單個圖像拼接成研究區(qū)域整體的圖像。再使用 ENVI 遙感圖像處理軟件進行輻射定標,采用偽標準地物輻射糾正法,通過建立地面實測反射率和地面實際反射系數(shù)之間的線性關系來實現(xiàn)輻射定標。在試驗田周邊布置兩個標稱反射率為0.03和0.22的3m×3m 航拍實驗標準反射率參考板。使用 ENVI 軟件從無人機圖像中提取與標準參考板相對應的DN 值。利用各光譜波段的參考板DN 值和已知的校準參考板反射率值建立了線性回歸方程,將無人機圖像的 DN 值轉換為輻射定標后的反射率

式中:ρ(x , y , i )—光譜帶i中像素( x , y )的輻射定標后的反射率;DN(x , y , i )—光譜帶i中像素( x , y )的 DN 值;ai、bi—光 譜 帶i 的 線 性 回 歸 模 型 的 斜 率 和截距。無人機多光譜影像的輻射定標需要單獨提取綠、紅、紅邊和近紅外波段影像的白色參考板DN值,依次分別進行單波段影像的輻射校正。最后,對經(jīng)過輻射定標的綠、紅、紅邊和近紅外波段影像進行波段合成處理,得到多光譜影像合成數(shù)據(jù)。對于地面采集的圖像,在采用 AdobePhoto shop 軟件處理高粱冠層圖片后,將照片導入 ENVI 軟件以估算植被覆蓋度FVC 值。具體的計算過程為:首先利用“maximumlikehood ”函數(shù),將每幅圖像分為有植被和無植被兩類。然后,使用“quick stats”函數(shù)確定植被區(qū)域中的像素數(shù)。將植被部分的像素數(shù)除以圖像的像素總數(shù),估算出每幅植被圖像的 FVC 值。
1.4 植被指數(shù)的選取
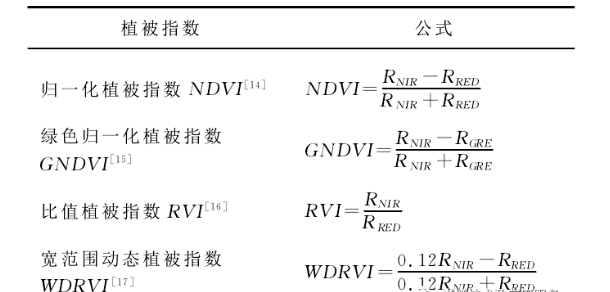
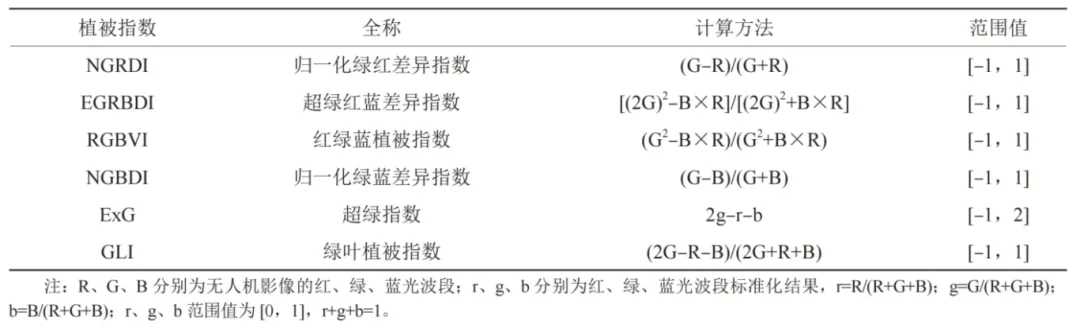
在輻射定標后,結合無人機遙感平臺,如表2所示,選擇4種常用的植被指數(shù)用于高粱LAI和 FVC反演模型的構建,利用ENVI軟件中的自帶函數(shù)計算植被指數(shù)。
表2選取的植被指數(shù)和計算公式
1.5 統(tǒng)計分析
使用驗證數(shù)據(jù)集分析回歸模型的準確性,選用評價指標:決定系數(shù)R2、均方根誤差 RMSE、平均絕對誤差MAPE評價回歸模型的精度。此外,使用T檢驗確定估測模型是否能夠以合理的精度預測高粱 的 FVC 和 LAI ,如果斜率值與1無顯著性差異,截距值與0無顯著性差異,則可以得出回歸模型與直線y=x無顯著性差異的結論,即估測模型可以實現(xiàn)高精度的預測。
2結果與分析
2.1 最優(yōu)估測植被指數(shù)
通過對比分析 NDVI 、綠色 NDVI 、RVI 和 WDR-V I 植被指數(shù)和高粱的 LAI 和 FVC 相關性,確定最優(yōu)的估測植被指數(shù)。從 50 幅無人機圖像中提取數(shù)據(jù)點構建樣本數(shù)據(jù)集,隨機選擇2/3的樣本數(shù)據(jù)作為訓練集與多光譜反射率影像建模,選擇指數(shù)回歸和線性 回 歸分別構建高粱 LAI 和 FVC 的估測模型。剩余的1/3樣本數(shù)據(jù)作為驗證集,評價回歸模型的性能,得到的 LAI 和 FVC 的4種植被指數(shù)的最佳擬合函數(shù)和評價指標分別如表3和表4所示。
表3 植被指數(shù)和葉面積指數(shù)的回歸模型
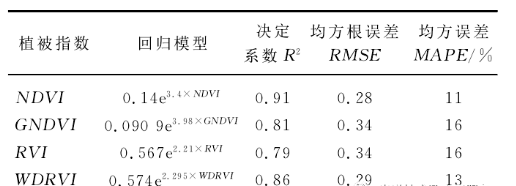
表4 植被指數(shù)與植被覆蓋度的回歸模型
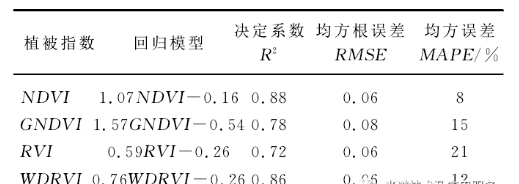
從表3和表4可得,NDVI 構建 LAI 和 FVC 的估算模型的精度和效果要優(yōu)于其他植被指數(shù)。相比于其他3 種植被指數(shù),LAI-NDVI 和 FVC-NDVI 估算模型的決定系數(shù) R2 值最高(0.91,0.88)且均方根誤差 RMSE(0.28,0.06)和平均絕對誤差MAPE(11%,8%)最低。WDRVI 的表現(xiàn)優(yōu)于綠色NDVI 和 RVI ,但該指數(shù)的R2較低,RMSE和MAPE 較高,與其他植被指數(shù)相比 RVI 顯示準確性最低。由于NDVI 與高粱作物的LAI 和 FVC 的相關性最大,所以選擇 ND-VI 指數(shù)進行下一步的詳細研究。
2.2 無人機遙感圖像預測LAI 精度評價
根據(jù)訓練數(shù)據(jù)集繪制 NDVI 和 LAI 之間的函數(shù)關系如圖1所示。
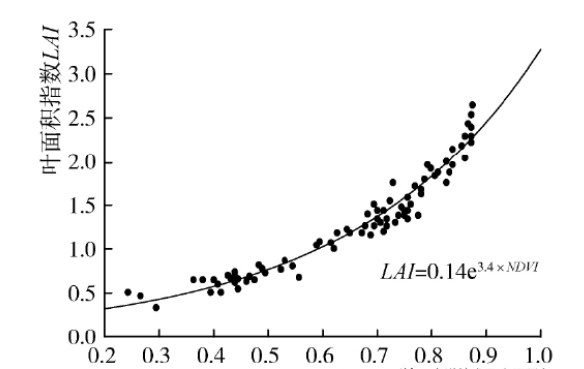
圖1植被指數(shù) NDVI 與葉面積指數(shù)的函數(shù)關系
由圖1 可以看出,在圖像采 集期間,高粱 的 LAI 值集中在 0.2~3.0 的 范 圍內。但 當 LAI >2.5 時,NDVI 不會發(fā)生明顯的變化,保持在 0.9 左右。該結果與其他學者的研究結果較為一致:LAI 的繼續(xù)增大不會顯著影響植物紅光波段吸收和反射,所以 NDVI 不會隨著高粱葉面積的增大而變化。該現(xiàn)象的主要原因是:對于多數(shù)農(nóng)作物,在 LAI ≥ 2.5,吸收峰高于95%時,紅光波段的冠層反射率小于5%。為了評估根據(jù)無人機遙感圖像 得到的 NDVI 與LAI 經(jīng)驗關系的可行性和準確性,對實測的 LAI 數(shù)據(jù)和通過無人機遙感數(shù)據(jù)得到的 LAI 的預測回歸模型進行交叉驗證,得到的結果如圖2所示。圖2中虛線為函數(shù)y=x,實線為葉面積指數(shù)實測值和預測值之間的最小二乘線性回歸方程。
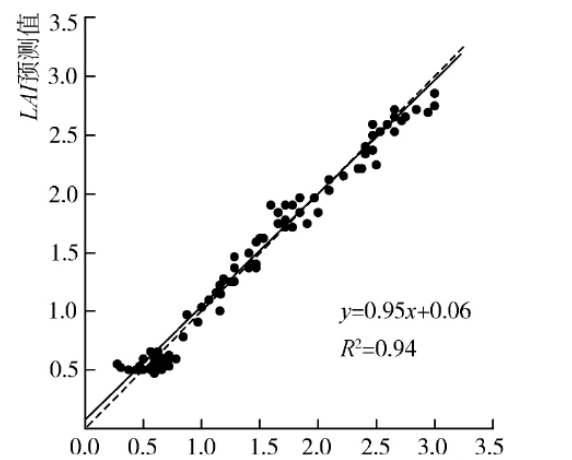
圖2 無人機遙感圖像預測葉面積指數(shù)效果圖
由圖2可以看出,根據(jù)無人機圖像得到的預測值和實測 LAI 值之間具有較好的擬合性,決定系數(shù) R2=0.94 ,RMSE =0.16 ,MAPE=13 %。通過最小二乘法得到的回歸方程y=0.95x+0.06 與實測數(shù)據(jù)之間的方差為 0.95 。T 檢驗結果顯示:回歸方程的斜率與1無顯 著 性 差 異 (p=0.14 ),截 距 與 0 無 顯 著 性 差 異(p=0.15),即回歸方程與方程y=x 沒有顯著差異。統(tǒng)計分析表明,根據(jù)遙感圖像構建 NDVI 和 LAI 的線性模型 LAI=0.14e3.4 ×NDVI 能夠對高粱的葉面積指數(shù) LAI 進行準確的預測。
2.3 無人機遙感圖像預測 FVC 精度評價
繪制訓練數(shù)據(jù)集的 NDVI 和 FVC 之間的函數(shù)關系,如圖3所示。
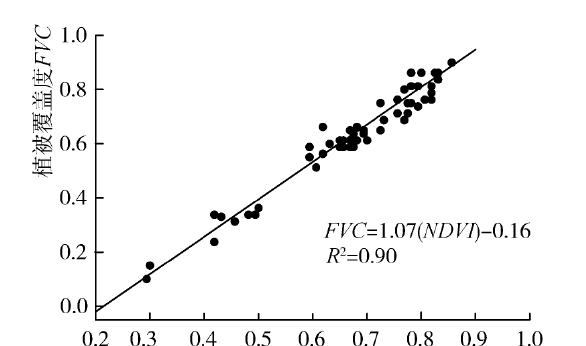
圖3植被指數(shù) NDVI 與植被覆蓋度的函數(shù)關系
根 據(jù) 圖 3 可 得,與 NDVI 和 LAI 關 系 不 同,NDVI 和 FVC 呈現(xiàn)線性關系(R 2=0.90),F(xiàn)VC 集中的分布在 0.6~0.9 之間。與前文的分析方法相同,使用 NDVI-FVC 的回歸模型對實測的 FVC 和根據(jù)無人機遙感圖像推算得到的 FVC 進行交叉驗證,得到驗證結果如圖4所示。圖4中虛線為函數(shù)y=x,實線為植被覆蓋度實測值和預測值之 間的最小二乘線性回歸方程。
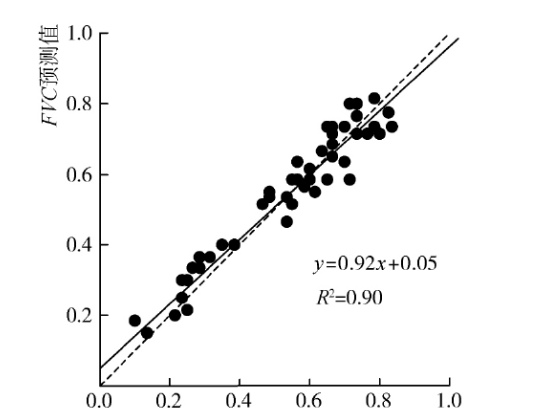
圖4無人機遙感圖像預測植被覆蓋度效果
由圖4可以看出,根據(jù)無人機圖像得到的預測值和實測 FVC 值之間具有較好的擬合性,決定系數(shù)R 2=0.90 ,RMSE =0.05 ,MAPE=4%。T 檢驗結果顯示,回歸方程的斜率與1無顯著性差異(p=0.07),截距與0無顯著性差異(p=0.05),即 回歸方 程與方 程y=x沒有顯 著 差 異。統(tǒng) 計 分 析 表 明,根 據(jù) 遙 感 圖 像 構 建NDVI和FVC 的線性模型FVC=1.07NDVI-0.16 能夠對高粱的植被覆蓋度 FVC 進行準確的預測。2.4 無人機遙感圖像預測 LAI-FVC 之間的關系根據(jù) FVC 和 LAI 的實測值,繪制兩者的函數(shù)關系如圖5所示。
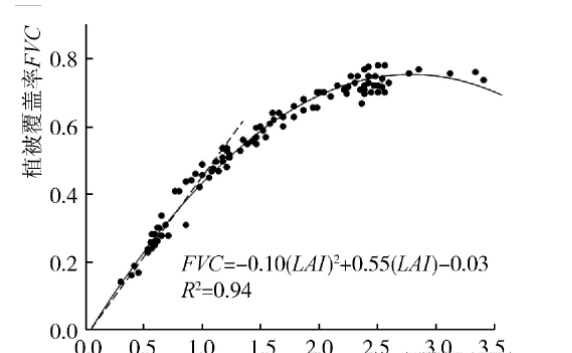
圖5LAI-FVC 實測值函數(shù)關系
從圖5可以看出,LAI-FVC 之間呈現(xiàn)曲線相關,在 LAI <1.5 時,如圖 5 中虛線所示,LAI-FVC 之間呈現(xiàn)線性的關系;當 LAI>1.5時,LAI-FVC 之間的曲線關系較為明顯。當高粱冠層的 LAI 值達到約 2.5 時,植被覆蓋了約70%的地面面積。在 LAI 大于 2.5 后,葉面積的繼續(xù)增大,并沒有引起植被覆蓋度的變化。因此,當?shù)貕K的植被覆蓋度較高時,雖然 LAI 仍可能增加,但其 NDVI 值基本不變。
3結 論
本研究利用無人機多光譜遙感系統(tǒng)建立了植被指數(shù)和高粱 LAI 、FVC 之間的回歸模型,并預測其精度,結果表明,通過無人機遙感技術可以精確、可靠地預測高粱作物的生長狀態(tài)。1)歸一化差異植被指數(shù) NDVI 為反應高粱長勢最優(yōu)的植被指數(shù),通過無人機遙感圖像得到的 NDVI 值估計高粱的 LAI 和 FVC 的 魯 棒 性 較 好。LAI -NDVI 和 FVC-NDVI 估 算 模 型 的 R2值 最 高 (0.91,0.88),且 RMSE(0.28,0.06)和 MAPE(11%,8%)最低。2)根據(jù)遙感圖像分別構建 NDVI 和LAI及 FVC的線性模型 LAI =0.14e3.4×NDVI和 FVC=1.07NDVI-0.16 能夠準確預測高粱的 LAI 值和 FVC值。3)在高粱生長季的后期 LAI >2.5 時,由于 ND-VI 飽和度問題會降低其對 LAI 預測效果。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統(tǒng)的研發(fā)、生產(chǎn)和銷售。
審核編輯:湯梓紅
-
監(jiān)測
+關注
關注
2文章
3653瀏覽量
44668 -
遙感
+關注
關注
0文章
248瀏覽量
16863 -
無人機
+關注
關注
230文章
10515瀏覽量
181818
發(fā)布評論請先 登錄
相關推薦
環(huán)境遙感行業(yè)發(fā)展趨勢分析 遙感數(shù)據(jù)集的獲取與使用
基于無人機高光譜影像的水稻分蘗數(shù)監(jiān)測方法研究

基于無人機高光譜遙感的河湖水環(huán)境探測
基于無人機多光譜遙感的棉花生長參數(shù)和產(chǎn)量估算
基于無人機遙感的作物長勢監(jiān)測研究進展

基于無人機高光譜遙感的荒漠化草原地物分類研究1.0
無人機遙感技術在農(nóng)業(yè)病蟲害監(jiān)測中的應用研究

無人機高光譜成像在甘蔗長勢分析和產(chǎn)量預測的應用
第四集 知語云智能科技無人機反制技術與應用--無人機的組成與工作原理
第三集 知語云智能科技無人機反制技術與應用--無人機的應用領域
第二集 知語云智能科技無人機反制技術與應用--無人機的發(fā)展歷程
第一集 知語科技無人機反制技術與應用--無人機的定義與分類
農(nóng)作物生長監(jiān)測中,無人機高光譜影像如何識別病蟲害和缺素情況?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論