 基于DSP芯片實現雷達回波信號采集和處理系統的設計
基于DSP芯片實現雷達回波信號采集和處理系統的設計
1引言
反應速度更快、精度更高、目標的自動錄取、使操作員能夠同時處理多批目標,是現代雷達所追求的技術指標。雷達視頻信號的數字采集和檢測是達成這樣目標的前提條件。眾所周知,雷達對目標位置的測量,主要是依據目標回波相對于發射電波的延遲時間以及雷達天線的方向來決定的。電波的傳播速度極快,傳播l海里的時間大約只有12.35μs,雷達發射電波的間隔一般在ms數量級。在此間隔時間內,理論上最多會有成百上千個目標的回波。要在如此短的時間之內,對這么多的目標回波信號進行數字采集和處理,快速的采集器件及高速計算機處理器必不可少。DSP(DigitalSignalProcessor)芯片,即數字信號處理器,就是這樣一種特別適用于進行這種實時信號處理的微處理器。本文以某雷達的技術參數為參考,用TMS320VC5402作為信號處理器,以AD9223為A/D變換器,采用雙端口存儲芯片IDT7203作數據暫存存儲器,介紹一種實現雷達回波信號的數字采集和處理方法。
2主要器件特性
TMS320VC54x是TI公司開發的低功耗、高性能數字信號處理芯片,主要應用于無線通信系統及雷達信號處理系統等。本文所采用的TMS320VC5402芯片是此系列的一個典型產品。該芯片的主要特點有:速度快,指令周期10ns,運算能力為100MIPS;強大的尋址能力,最大可尋址外部存儲器1M×16位,內置16K×16位的RAM,4K×16位的ROM;40位的算術邏輯運算單元(ALU),包括2個獨立的40位累加器和1個40位的桶形移位寄存器;1個17位×17位的硬件乘法器和1個40位的專用加法器,乘法器/加法器單元可在一個流水線狀態周期內完成一次乘法累加運算(MA)。
AD9223是一種采用高速CMOS處理和新穎的4級流水線結構的高性能、低噪聲、單電源、12位模/數變換器。適用于航海、通信、雷達、醫療等領域的數據采集系統。其主要特點有:高速度、高分辨力,采樣時鐘頻率可達3Msps,分辨力為12位;單時鐘輸入,采用單時鐘輸入控制內部所有的轉換周期;模擬信號輸入靈活,真正的差分輸入結構允許模擬信號以單端或差分兩種分式輸入;靈活的參考電壓,適應不同應用的精度及溫度漂移的要求,參考電壓可選擇內部或外部(1V或2.5V);采用4級流水線結構及寬帶取樣保持放大器(SHA),使器件在每個時鐘周期都可捕獲輸入的采樣信號,數據的輸出延時為3個時鐘周期。
IDT7203是一種雙端口先進先出(FIFO)9位存儲緩沖器,存儲容量為2KB。輸入和輸出具有各自的地址指針,每一個讀或寫操作,對應的輸出及輸入地址指針自動加1。復位信號可將兩個地址指針全部清除。對外提供數據區空(empty)、半滿(half-full)及滿(full)信號,用來指示器件的狀態。最快讀寫速度為12ns。
3二級門限判決的工作原理
雷達的視頻信號中始終包含有目標信號和噪聲信號,即x(t)=s(t)+n(t)。雷達信號處理的根本目的就是,從接收到的視頻信號x(t)中提取出有用的目標信號s(t),濾除無用的雜波或干擾信號n(t)。在進行雷達信號處理時,預先并不知道目標在一定條件下出現的概率,也很難確定一次漏警所造成的損失,故常采用奈曼一皮爾遜準則,即在允許一定虛警概率的條件下,使漏警概率達到最小。二級門限判決方法,是一種有效而實用的雷達信號處理方法。
3.1二級門限判決原理
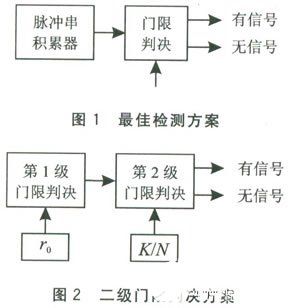
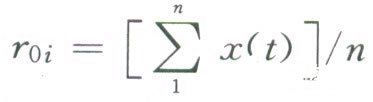
由最佳檢測理論知道,對于非相參高頻脈沖串,采用檢波后的積累(視頻積累)來改善雷達檢測性能是一種最佳方案,其原理如圖1所示。這種方案若采用模擬電路處理,比較復雜,實現起來也相當困難;若采用數字化處理,直觀的辦法是將雷達接收機的視頻信號按距離(時間)和幅度進行量化處理變為數字信號,然后存儲N個重復周期。對每一個重復周期按距離單元對每一個單元的信號幅度值設定一個門限值(r0),稱為第一門限。對每一個重復周期所量化的所有距離單元的視頻信號值x(TI),與其相對應的門限值roi進行幅度值的比較。如果視頻信號值超出它的門限值,認為是“可能目標”信號;否則,認為無信號。這個過程稱為第一級門限判決。對應于每一個重復周期內每一個距離單元所建立的第一門限值(roi)是各不相同的,而且,每一個重復周期所建立的也各不相同。這里將每一個重復周期所建立的第一門限值的集合稱為雜波均值估值表或叫雜波圖。對于“可能目標”信號,并不能肯定它一定是目標信號。因為有時突發的雜亂干擾信號或隨機噪聲信號,各次掃描的取樣是不相關的。它們可能會偶然一二次超過第一門限值,但連續多次超過第一門限值的可能性很小;而對于目標來說,相鄰各次掃描均應有回波信號,在N個取樣中連續超過第一門限值的概率較大。因此,需要按距離單元將超過各自第一門限值的量化脈沖進行計數,如果在N個重復周期中有K個以上的量化脈沖超過各自的第一門限值,則判決為有信號。這個過程稱為第二級門限判決(K/N判決),而K/N稱為第二門限值,工作原王單如圖2所示
3.2雜波均值估值表的建立
雜波均值估值表(雜波圖),是根據每個重復周期雷達視頻信號的量化值所建立起來的每個距離單元的雜波信號的平均值表。建立的方法為鄰近單元平均估值法。具體是,設某個距離單元TI上的視頻信號為x(TI),以ti單元為中心,前后共取n個參考距離單元,對這n個參考單元的視頻信號數值求平均值
作為這個距離單元的雜波平均估值。也叫作這個距離單元的第一門限值roi值的大小由雷達探測區域的雜波環境所決定。n值愈小,由于參考單元太少,會引起雜波平均估值的起伏變化愈大,將引起虛警概率的增加;而n值愈大時,雜波的平均估值起伏愈小,即第一門限值愈平穩,可得到恒虛警效果,但會使得資源開銷增大,增加實現的難度。對于氣象和海浪雜波來說,它們通常是連接成片的區域,比較適合采用鄰近單元平均估值法建立雜波均值表。這里n取16。由于以52.5m為一個距離單元,相當于對檢測點前后各420m的距離范圍取雜波的平均估值。
3.3第二級門限值K/N的計算
為保證符合奈曼一皮爾遜準則,N值的選擇應取決于天線波束掃過目標的時間內目標的回波脈沖數,是由雷達的工作參數決定的。對于某船用雷達來說,其部分工作參數為:重復頻率1200Hz,觸發脈沖寬度O.7μs,天線轉速20r/min,天線波束寬度O.7°,作用距離40海里。N的取值為N=O.7×1200/(20×6)=7。根據經驗,K的取值為1.5√N。這里K=4,即K/N=4/7。
4硬件電路設計
硬件電路工作原理如圖3所示。根據雷達的主要技術參數,得知雷達的距離分辨力為150×0.7=105m,在不降低原雷達性能的前提下,這里選擇2.857142857MHz的采樣頻率(相當于以52.5m作為一個采樣距離單元)。存儲器以同樣的速率采集數據(大約每52.5m采集一個雷達視頻信號的數值)。這樣的話,40海里的最大測距量程,對應于雷達的每一次發射,電路應當采集1412個距離單元的視頻信號量化值(這里取1500個距離單元),因此,雙端口RAM容量選用2KB即可。由于訪問速度要快,選用了IDT7203。對于信號的量化位數,即A/D轉換位數的選擇,考慮到量化噪聲的影響,所取的位數愈多影響愈小。為照顧DSP的處理能力以及A/D轉換器件的轉換速度,采用12位。
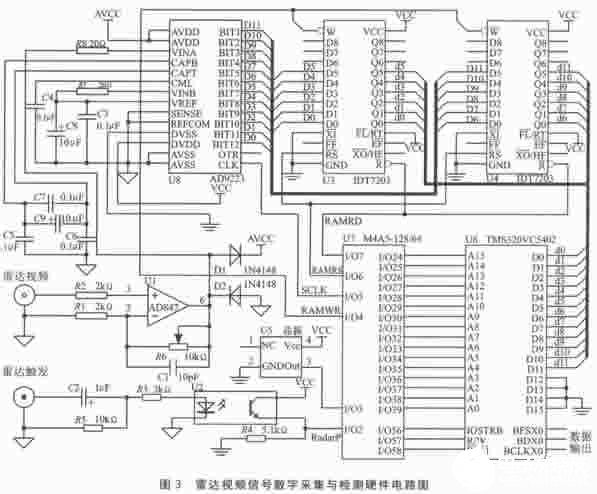
A/D轉換器AD9223的設置:采用片內2.5V作為參考電壓;VINB接參考電壓值,這樣VINA的輸入值最大可到5V,最小為OV;運算放大器U3提供的視頻信號應當符合這個要求。
DSP對中斷信號響應后,執行數據接收的中斷服務程序。該程序以極快的速度把雙端口RAM中的數據提取到自己的內部存儲器中,這時DSP再運行濾波和目標提取程序,最后將完全處理好的數據通過串行接口傳送出去。
雙端口RAM的讀信號RAMRD在執行讀OFF00H地址的指令時,由DSP產生的地址信號(OFF00H)、WR信號以及10STRB信號的共同作用而產生。
5軟件設計
軟件的主要任務是處理已經被數字化了的視頻信號。為了實現快速處理,程序采用匯編語言編寫,保證在一個重復周期內將數據處理完畢。程序運行的區域安排在TMS320VC5402片內RAM的0000H~03FFH的1KB內存中。數據輸入區在0400H~09FFH,占1.5KB內存。雜波均值估值表(雜波圖)位于OA00H~OFFFH,占1.5KB內存。輸出數據區(處理結果)位于1000H~15FFH,占1.5KB內存。從1600H開始至3FFFH的10.5KB存儲區,被平均分為7個數據區,作為7個重復周期的數據積累區。對于存儲雷達視頻信號量化數據的每一個存儲區,其每一個地址單元的地址代表一個距離單元,其內存儲的數據代表該距離單元處視頻信號的幅度量化值。程序響應中斷后,工作過程為:數據的采集→建立雜波均值估值表(雜波圖)→第一門限判決→第二門限判決→數據輸出。方位信號的采集以及處理以后數據的輸出,此處不作討論。
5.1數據的采集
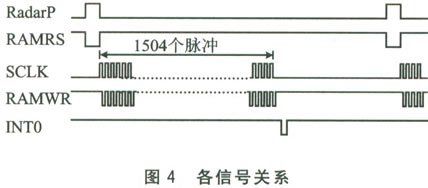
由于TMS320VC5402運行的速度極快,單指令周期為10ns,而雙端口RAM的最快訪問速度為12ns。為了保證數據的可靠讀取,把I/0操作設置為延遲2個執行周期。DSP對于外部中斷0(INTO)響應后進人中斷服務,把雙端口RAM中的數據讀到DSP的內置存儲器以0408H起始的1500個單元中。程序初始化時,將0400H起始的8個單元設置為0。這完全是為了計算雜波均值估值表(雜波圖)時的編程方便,其程序如下:
GETDATA:STM#0408H,AR6;初始地址
RPT#(1500—1);重復次數
PORTROFF00H,*AR6+;讀數
據
RETE ;中斷返回
5.2建立雜波均值估值表
根據3.2雜波均值估值表的建立方法,對每一個距離單元,前取8個,后取7個,共16個作參考單元,計算平均值,作該單元的雜波均值估值。總共計算1500個距離單元的雜波均值估值,放置于OA00H~OFFFH的存儲區域。具體實現時,須先計算出第一個單元的雜波平均值估值,其后的逐個計算。程序代碼如下:
STM#O4ooH,AR5;讀入數據的首址
STM#OA00H,AR7;均值估值首址
RPTZA,(16—1);循環16次
ADD*AR5+,A;求和
STLA,一4,*AR7+;除以16,放入估值表
STM#0400H,AR6;計算余下的1499個
STM#(1500—2),BRC
RPTBZBEND一1
SUB*AR6+,A
ADD*AR5+,A
STLA,一4,*AR7+
ZBEND:RET
5.3第一級門限判決
將讀入的雷達視頻信號值以距離單元為單位,逐個與雜波均值估值表中對應距離單元的數值作比較:如果某單元雷達視頻信號的數值較其對應的雜波均值估值大,認為此單元為“可能目標”的回波信號,將它放置到數據積累區中(1600H起始)相應的單元,同時也放置到輸出數據塊中(1000H起始);否則,這兩個單元都被清零。程序中用AR3作數據積累區的地址指針,其初值為1600H,由初始化程序設置。程序代碼如下:
STM#0408H,AR7;輸入數據區首址
STM#oA00H,AR6;均值估值表首址
STM#1000H,AR5;輸出數據區首址
STM#(1500—1),BRC:;距離單元總數
RPTBPJlE一1;重復
LD*AR6+,A;取雜波均值估值
STM*AR7,T;取輸入的數據
ST#0,*AR3;積累區先清零
ST#O,*AR5;輸出區先清零
SUB*AR7+,A;比較
STRCD*AR3+,ALT;數據大,分別放置
STRCD*AR5+,ALT;到積累區和輸出區
PJlE:LDAR3,B;調整積累區指針
ADD#100H,B
AND#OFF00H,B
SUB#4000H,B
BCPJlEND,BLT
SUB#2A00H,B
PJIEND:ADD#4000H,B
STMLB,AR3;調整積累區指針結束
RET
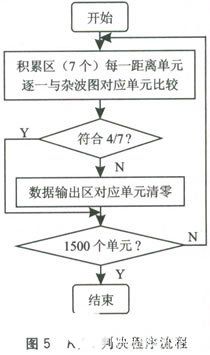
5.4第二級門限判決
第二門限判決就是在第一門限判決的基礎上,濾除那些偶然超過第一門限,但是又是在多次掃描中,孤立的、互不相關的雜波噪聲信號,就是對那些“可能目標”的信號作進一步的處理,進一步降低檢測目標的虛警概率。根據2.3節的討論,第二門限值(K/N)的取值為4/7。由于在第一門限判決處理時已經建立了7次掃描的累積數據和初步的輸出數據,它們分別位于數據累積區和數據輸出區。因此,在程序的具體實現時,就是根據最新的積累數據,對量程范圍內的每個距離單元逐個進行K/N判決,符合K/N判決準則的,輸出數據區的數值不變,而不符合準則的將該距離單元所在數據輸出區的數值清零。由于程序代碼較長,用圖5所示流程表示。
6結語
本文介紹的基于DSP的雷達視頻信號的數字采集和處理系統的設計,作為一種雷達視頻信號處理的方法,適用于多種雷達的信號處理,對于不同型號的雷達,由于其用途的不同,其技術參數也不相同。只要選擇合適的工作參數,此設計對其他種類雷達的視頻信號仍然適用。
-
雷達
+關注
關注
50文章
2963瀏覽量
117837 -
DSP芯片
+關注
關注
9文章
149瀏覽量
30034 -
處理系統
+關注
關注
0文章
93瀏覽量
16682
發布評論請先 登錄
相關推薦
定華雷達儀表學堂:雷達物位計的工作原理與特點是什么?
使用TMS320C31 DSP實現信號處理子系統以檢測激勵聲發射






 工商網監
工商網監
評論