 直流無刷電機該的控制方法
直流無刷電機該的控制方法
BLDC進行梯形波控制時,需要檢測轉子磁極位置,根據檢測的位置定子線圈進行換相通電,形成6步的旋轉磁場,進而帶動轉子同步轉動的控制方式。而檢測轉子磁極位置又可分為電機帶霍爾傳感器(有感)以及不帶霍爾傳感器方法,檢測轉子磁極位置的方法不同,會直接BLDC控制模式不同。
BLDC有感控制
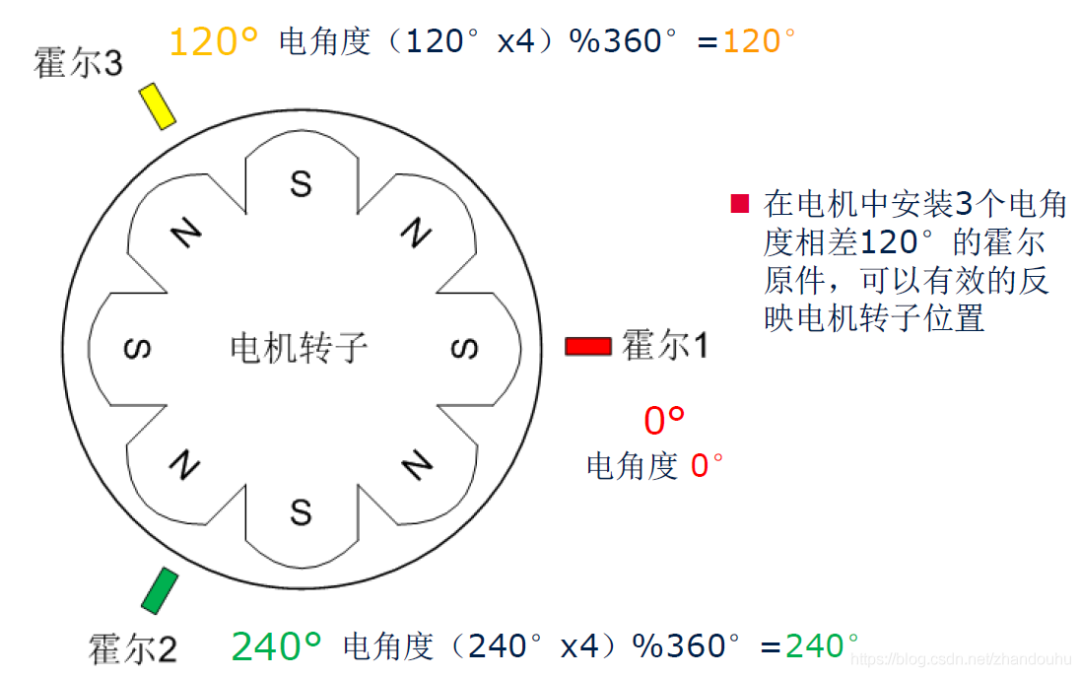
對于BLDC有感控制,要求BLDC電機本身裝有霍爾傳感器,電機霍爾傳感器安裝時需要相差120°,如下圖所示
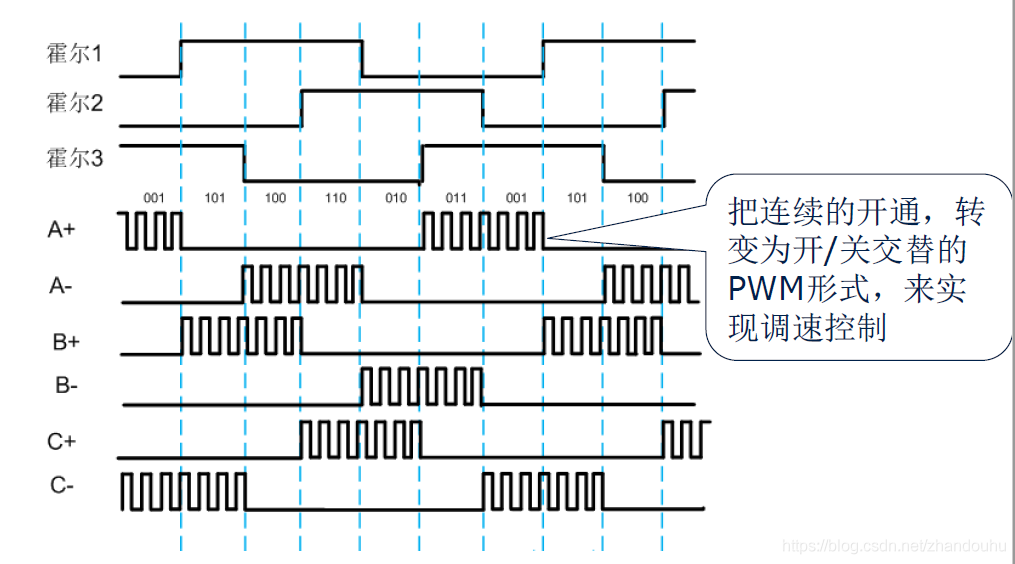
電機按一定方向轉動時,3個霍爾的輸出會按照6步的規律變化如下:
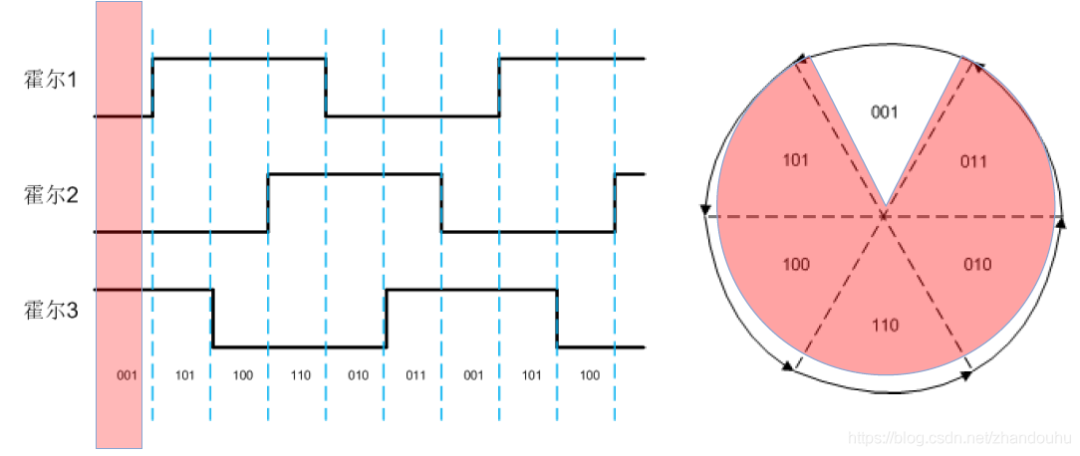
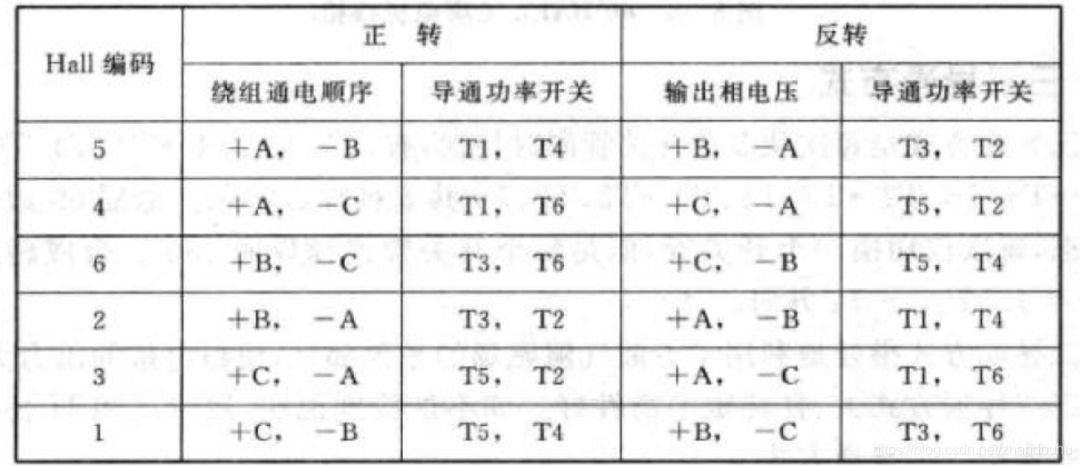
根據霍爾傳感器位置,進而按照一定規律給三相繞組通電,從而來實現電機的控制。考慮到每個電機霍爾傳感器安裝方式不同,換相開關表會有一定的區別。具體可以根據廠商提供的資料或實測電機霍爾輸出來確定關系。
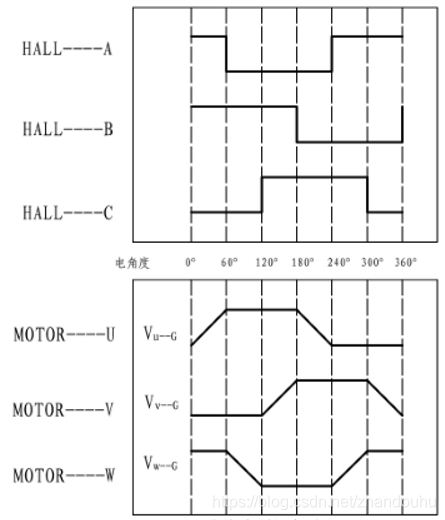
如下為一種電機的霍爾輸出與反電動勢輸出示意,可知在電機霍爾A輸出由1變為0時,控制U+開通。
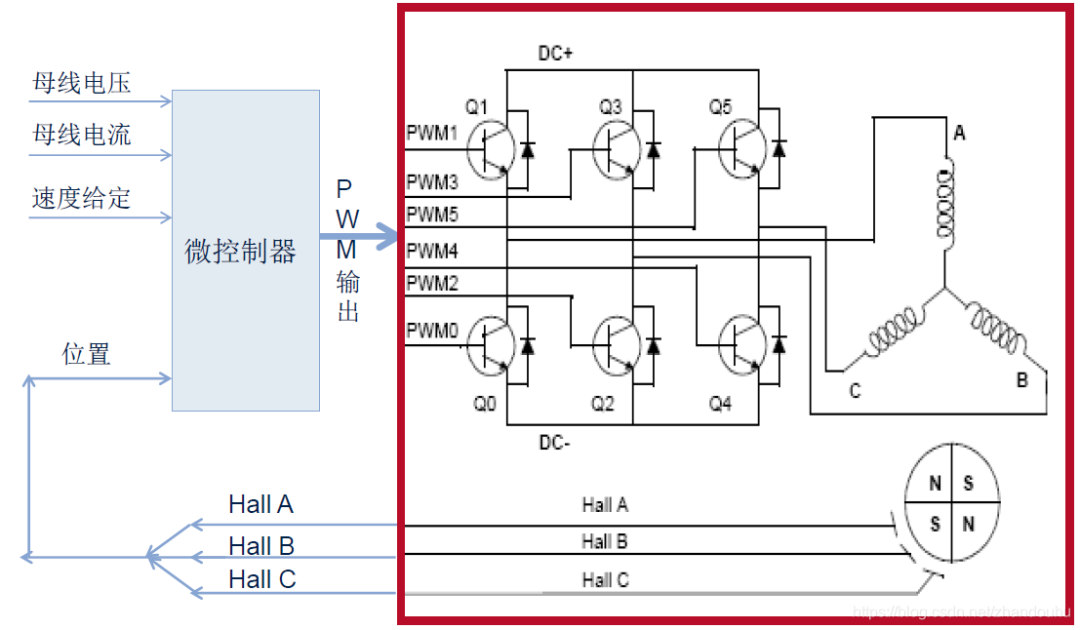
BLDC有感控制系統如下:
BLDC速度控制
在BLDC電子換相的基礎上,通過更改導通時PWM占空比即可改變等效的輸出電壓, 從而更改來實現調速。
在這里插入圖片描述
BLDC無感控制
BLDC使用霍爾傳感器時,存在以下問題:HALL的安裝條件受到限制、Hall影響系統可靠性(Hall易損壞,需要檢修)、Hall對安裝精度有要求、有一定成本。因此有必要研究BLDC的無感控制方法。
BLDC 無傳感器控制的主要任務就是對轉子位置進行估計。兩種基本技術如下:
基于反電動勢感應的技術:基于反電動勢過零來進行換相;要求反電動勢足夠高,速度范圍在額定轉速的5-10%至100%。
基于電機電感凸極的技術:基于瞬態電流測量;速度范圍為靜止至標稱速度的約20%。
常用的是基于反電動勢過零檢測的方法,但這要求電機有一定速度;有時候會結合使用,但需要使用復雜的控制算法。下面主要對基于反電動勢感應的技術進行介紹。
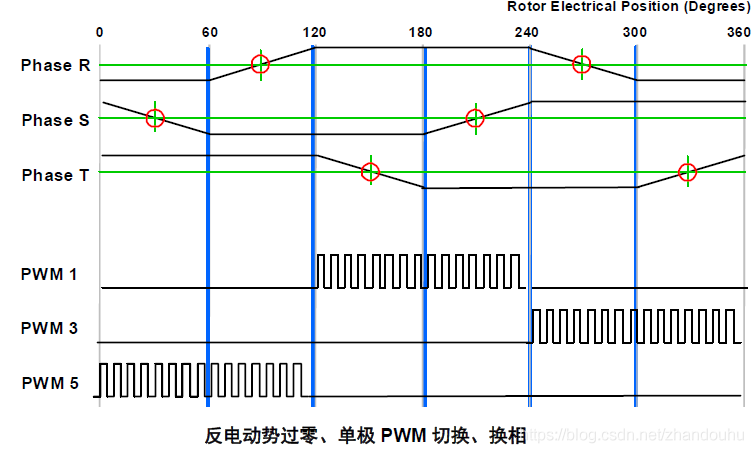
正確換相的電機相繞組電壓波形與反電動勢波形如圖所示。從圖中可得到正確的換相點應在過零點延遲30°。因此,反電動勢過零信號可以用作估計正確換相時間點的計算依據。
原文標題:直流無刷電機該如何控制?
文章出處:【微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
線圈
+關注
關注
14文章
1838瀏覽量
44582 -
控制
+關注
關注
4文章
1014瀏覽量
122723 -
無刷電機
+關注
關注
58文章
847瀏覽量
45987
原文標題:直流無刷電機該如何控制?
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論