 韋東山freeRTOS系列教程之隊列(queue)(5)
韋東山freeRTOS系列教程之隊列(queue)(5)
文章目錄
- 系列教程總目錄
- 概述
-
5.1 隊列的特性
- 5.1.1 常規操作
- 5.1.2 傳輸數據的兩種方法
- 5.1.3 隊列的阻塞訪問
-
5.2 隊列函數
- 5.2.1 創建
- 5.2.2 復位
- 5.2.3 刪除
- 5.2.4 寫隊列
- 5.2.5 讀隊列
- 5.2.6 查詢
- 5.2.7 覆蓋/偷看
- 5.3 示例8: 隊列的基本使用
- 5.4 示例9: 分辨數據源
- 5.5 示例10: 傳輸大塊數據
- 5.6 示例11: 郵箱(Mailbox)
需要獲取更好閱讀體驗的同學,請訪問我專門設立的站點查看,地址:http://rtos.100ask.net/
系列教程總目錄
本教程連載中,篇章會比較多,為方便同學們閱讀,點擊這里可以查看文章的 目錄列表,目錄列表頁面地址:https://blog.csdn.net/thisway_diy/article/details/121399484
概述
隊列(queue)可以用于"任務到任務"、“任務到中斷”、"中斷到任務"直接傳輸信息。
本章涉及如下內容:
- 怎么創建、清除、刪除隊列
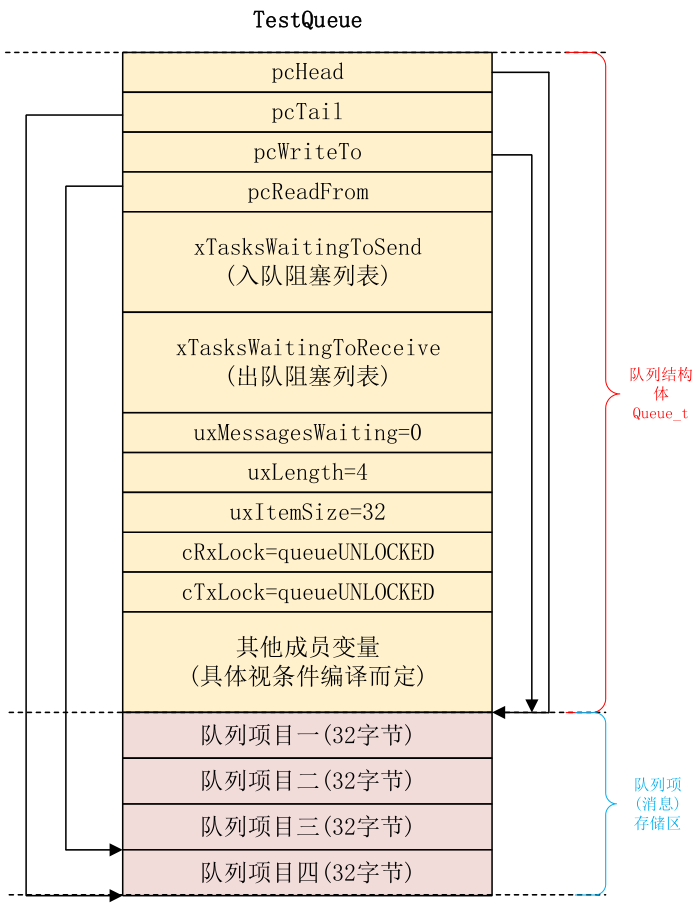
- 隊列中消息如何保存
- 怎么向隊列發送數據、怎么從隊列讀取數據、怎么覆蓋隊列的數據
- 在隊列上阻塞是什么意思
- 怎么在多個隊列上阻塞
- 讀寫隊列時如何影響任務的優先級
5.1 隊列的特性
5.1.1 常規操作
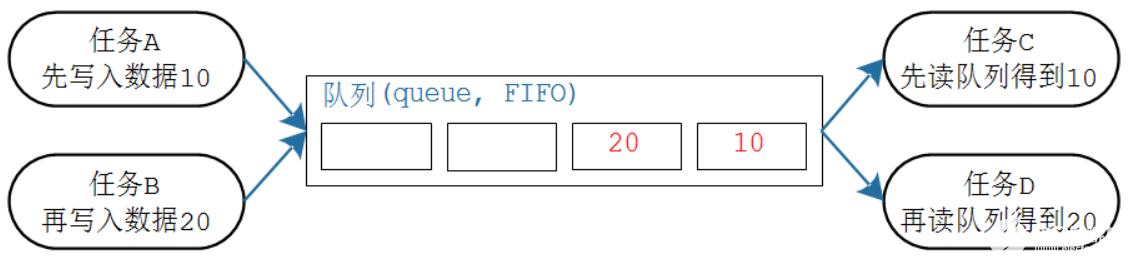
隊列的簡化操如入下圖所示,從此圖可知:
- 隊列可以包含若干個數據:隊列中有若干項,這被稱為"長度"(length)
- 每個數據大小固定
- 創建隊列時就要指定長度、數據大小
- 數據的操作采用先進先出的方法(FIFO,First In First Out):寫數據時放到尾部,讀數據時從頭部讀
- 也可以強制寫隊列頭部:覆蓋頭部數據
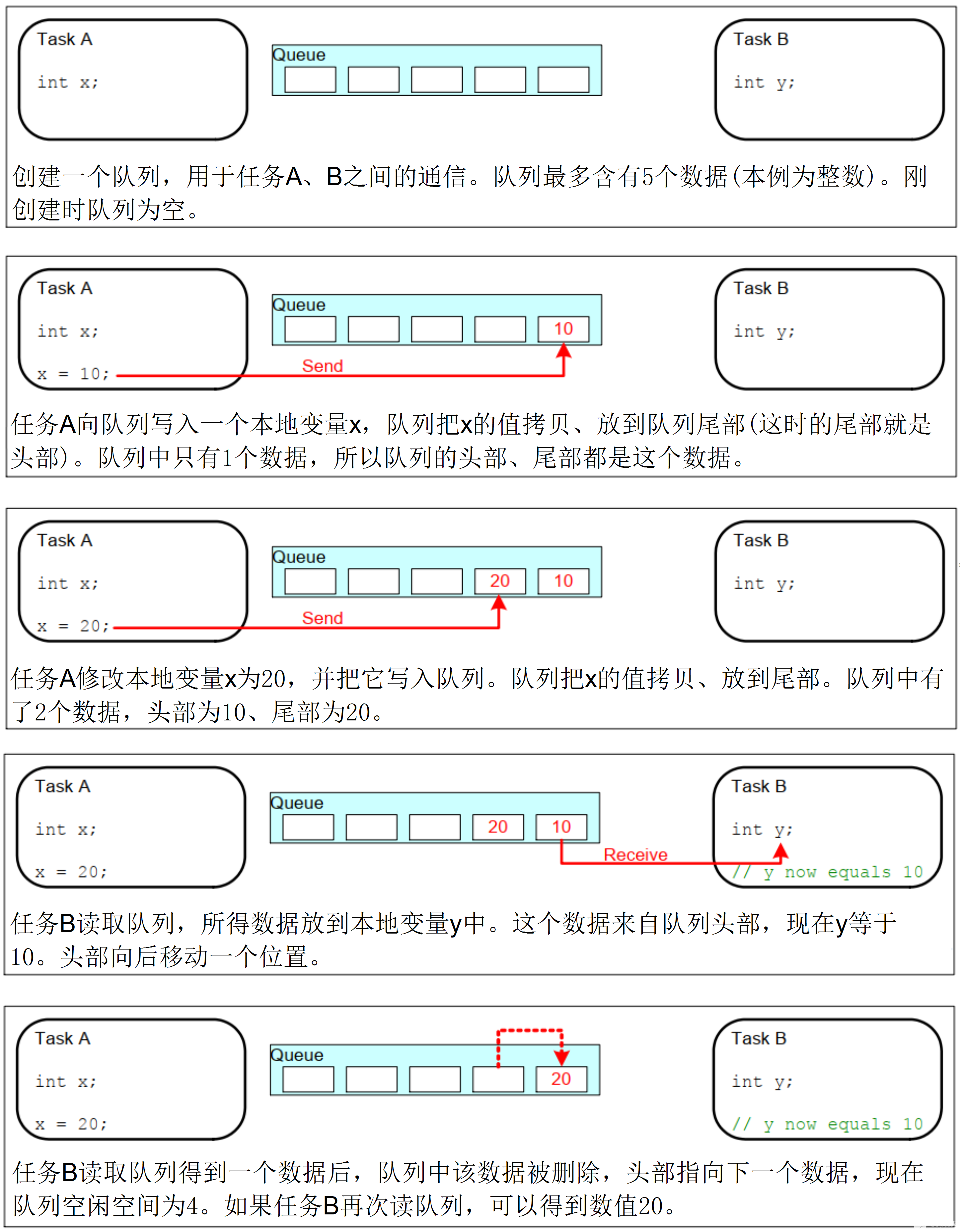
更詳細的操作入下圖所示:
5.1.2 傳輸數據的兩種方法
使用隊列傳輸數據時有兩種方法:
- 拷貝:把數據、把變量的值復制進隊列里
- 引用:把數據、把變量的地址復制進隊列里
FreeRTOS使用拷貝值的方法,這更簡單:
局部變量的值可以發送到隊列中,后續即使函數退出、局部變量被回收,也不會影響隊列中的數據
無需分配buffer來保存數據,隊列中有buffer
局部變量可以馬上再次使用
發送任務、接收任務解耦:接收任務不需要知道這數據是誰的、也不需要發送任務來釋放數據
如果數據實在太大,你還是可以使用隊列傳輸它的地址
隊列的空間有FreeRTOS內核分配,無需任務操心
對于有內存保護功能的系統,如果隊列使用引用方法,也就是使用地址,必須確保雙方任務對這個地址都有訪問權限。使用拷貝方法時,則無此限制:內核有足夠的權限,把數據復制進隊列、再把數據復制出隊列。
5.1.3 隊列的阻塞訪問
只要知道隊列的句柄,誰都可以讀、寫該隊列。任務、ISR都可讀、寫隊列。可以多個任務讀寫隊列。
任務讀寫隊列時,簡單地說:如果讀寫不成功,則阻塞;可以指定超時時間。口語化地說,就是可以定個鬧鐘:如果能讀寫了就馬上進入就緒態,否則就阻塞直到超時。
某個任務讀隊列時,如果隊列沒有數據,則該任務可以進入阻塞狀態:還可以指定阻塞的時間。如果隊列有數據了,則該阻塞的任務會變為就緒態。如果一直都沒有數據,則時間到之后它也會進入就緒態。
既然讀取隊列的任務個數沒有限制,那么當多個任務讀取空隊列時,這些任務都會進入阻塞狀態:有多個任務在等待同一個隊列的數據。當隊列中有數據時,哪個任務會進入就緒態?
- 優先級最高的任務
- 如果大家的優先級相同,那等待時間最久的任務會進入就緒態
跟讀隊列類似,一個任務要寫隊列時,如果隊列滿了,該任務也可以進入阻塞狀態:還可以指定阻塞的時間。如果隊列有空間了,則該阻塞的任務會變為就緒態。如果一直都沒有空間,則時間到之后它也會進入就緒態。
既然寫隊列的任務個數沒有限制,那么當多個任務寫"滿隊列"時,這些任務都會進入阻塞狀態:有多個任務在等待同一個隊列的空間。當隊列中有空間時,哪個任務會進入就緒態?
- 優先級最高的任務
- 如果大家的優先級相同,那等待時間最久的任務會進入就緒態
5.2 隊列函數
使用隊列的流程:創建隊列、寫隊列、讀隊列、刪除隊列。
5.2.1 創建
隊列的創建有兩種方法:動態分配內存、靜態分配內存,
- 動態分配內存:xQueueCreate,隊列的內存在函數內部動態分配
函數原型如下:
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength, UBaseType_t uxItemSize );
| 參數 | 說明 |
|---|---|
| uxQueueLength | 隊列長度,最多能存放多少個數據(item) |
| uxItemSize | 每個數據(item)的大小:以字節為單位 |
| 返回值 |
非0:成功,返回句柄,以后使用句柄來操作隊列 NULL:失敗,因為內存不足 |
- 靜態分配內存:xQueueCreateStatic,隊列的內存要事先分配好
函數原型如下:
QueueHandle_t xQueueCreateStatic(
UBaseType_t uxQueueLength,
UBaseType_t uxItemSize,
uint8_t *pucQueueStorageBuffer,
StaticQueue_t *pxQueueBuffer
);
| 參數 | 說明 |
|---|---|
| uxQueueLength | 隊列長度,最多能存放多少個數據(item) |
| uxItemSize | 每個數據(item)的大小:以字節為單位 |
| pucQueueStorageBuffer |
如果uxItemSize非0,pucQueueStorageBuffer必須指向一個uint8_t數組, 此數組大小至少為"uxQueueLength * uxItemSize" |
| pxQueueBuffer | 必須執行一個StaticQueue_t結構體,用來保存隊列的數據結構 |
| 返回值 |
非0:成功,返回句柄,以后使用句柄來操作隊列 NULL:失敗,因為pxQueueBuffer為NULL |
示例代碼:
// 示例代碼
#define QUEUE_LENGTH 10
#define ITEM_SIZE sizeof( uint32_t )
// xQueueBuffer用來保存隊列結構體
StaticQueue_t xQueueBuffer;
// ucQueueStorage 用來保存隊列的數據
// 大小為:隊列長度 * 數據大小
uint8_t ucQueueStorage[ QUEUE_LENGTH * ITEM_SIZE ];
void vATask( void *pvParameters )
{
QueueHandle_t xQueue1;
// 創建隊列: 可以容納QUEUE_LENGTH個數據,每個數據大小是ITEM_SIZE
xQueue1 = xQueueCreateStatic( QUEUE_LENGTH,
ITEM_SIZE,
ucQueueStorage,
&xQueueBuffer );
}
5.2.2 復位
隊列剛被創建時,里面沒有數據;使用過程中可以調用xQueueReset()把隊列恢復為初始狀態,此函數原型為:
/* pxQueue : 復位哪個隊列;
* 返回值: pdPASS(必定成功)
*/
BaseType_t xQueueReset( QueueHandle_t pxQueue);
5.2.3 刪除
刪除隊列的函數為vQueueDelete(),只能刪除使用動態方法創建的隊列,它會釋放內存。原型如下:
void vQueueDelete( QueueHandle_t xQueue );
5.2.4 寫隊列
可以把數據寫到隊列頭部,也可以寫到尾部,這些函數有兩個版本:在任務中使用、在ISR中使用。函數原型如下:
/* 等同于xQueueSendToBack
* 往隊列尾部寫入數據,如果沒有空間,阻塞時間為xTicksToWait
*/
BaseType_t xQueueSend(
QueueHandle_t xQueue,
const void *pvItemToQueue,
TickType_t xTicksToWait
);
/*
* 往隊列尾部寫入數據,如果沒有空間,阻塞時間為xTicksToWait
*/
BaseType_t xQueueSendToBack(
QueueHandle_t xQueue,
const void *pvItemToQueue,
TickType_t xTicksToWait
);
/*
* 往隊列尾部寫入數據,此函數可以在中斷函數中使用,不可阻塞
*/
BaseType_t xQueueSendToBackFromISR(
QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken
);
/*
* 往隊列頭部寫入數據,如果沒有空間,阻塞時間為xTicksToWait
*/
BaseType_t xQueueSendToFront(
QueueHandle_t xQueue,
const void *pvItemToQueue,
TickType_t xTicksToWait
);
/*
* 往隊列頭部寫入數據,此函數可以在中斷函數中使用,不可阻塞
*/
BaseType_t xQueueSendToFrontFromISR(
QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken
);
這些函數用到的參數是類似的,統一說明如下:
| 參數 | 說明 |
|---|---|
| xQueue | 隊列句柄,要寫哪個隊列 |
| pvItemToQueue |
數據指針,這個數據的值會被復制進隊列, 復制多大的數據?在創建隊列時已經指定了數據大小 |
| xTicksToWait |
如果隊列滿則無法寫入新數據,可以讓任務進入阻塞狀態, xTicksToWait表示阻塞的最大時間(Tick Count)。 如果被設為0,無法寫入數據時函數會立刻返回; 如果被設為portMAX_DELAY,則會一直阻塞直到有空間可寫 |
| 返回值 |
pdPASS:數據成功寫入了隊列 errQUEUE_FULL:寫入失敗,因為隊列滿了。 |
5.2.5 讀隊列
使用xQueueReceive()函數讀隊列,讀到一個數據后,隊列中該數據會被移除。這個函數有兩個版本:在任務中使用、在ISR中使用。函數原型如下:
BaseType_t xQueueReceive( QueueHandle_t xQueue,
void * const pvBuffer,
TickType_t xTicksToWait );
BaseType_t xQueueReceiveFromISR(
QueueHandle_t xQueue,
void *pvBuffer,
BaseType_t *pxTaskWoken
);
參數說明如下:
| 參數 | 說明 |
|---|---|
| xQueue | 隊列句柄,要讀哪個隊列 |
| pvBuffer |
bufer指針,隊列的數據會被復制到這個buffer 復制多大的數據?在創建隊列時已經指定了數據大小 |
| xTicksToWait |
果隊列空則無法讀出數據,可以讓任務進入阻塞狀態, xTicksToWait表示阻塞的最大時間(Tick Count)。 如果被設為0,無法讀出數據時函數會立刻返回; 如果被設為portMAX_DELAY,則會一直阻塞直到有數據可寫 |
| 返回值 |
pdPASS:從隊列讀出數據入 errQUEUE_EMPTY:讀取失敗,因為隊列空了。 |
5.2.6 查詢
可以查詢隊列中有多少個數據、有多少空余空間。函數原型如下:
/*
* 返回隊列中可用數據的個數
*/
UBaseType_t uxQueueMessagesWaiting( const QueueHandle_t xQueue );
/*
* 返回隊列中可用空間的個數
*/
UBaseType_t uxQueueSpacesAvailable( const QueueHandle_t xQueue );
5.2.7 覆蓋/偷看
當隊列長度為1時,可以使用xQueueOverwrite()或xQueueOverwriteFromISR()來覆蓋數據。
注意,隊列長度必須為1。當隊列滿時,這些函數會覆蓋里面的數據,這也以為著這些函數不會被阻塞。
函數原型如下:
/* 覆蓋隊列
* xQueue: 寫哪個隊列
* pvItemToQueue: 數據地址
* 返回值: pdTRUE表示成功, pdFALSE表示失敗
*/
BaseType_t xQueueOverwrite(
QueueHandle_t xQueue,
const void * pvItemToQueue
);
BaseType_t xQueueOverwriteFromISR(
QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken
);
如果想讓隊列中的數據供多方讀取,也就是說讀取時不要移除數據,要留給后來人。那么可以使用"窺視",也就是xQueuePeek()或xQueuePeekFromISR()。這些函數會從隊列中復制出數據,但是不移除數據。這也意味著,如果隊列中沒有數據,那么"偷看"時會導致阻塞;一旦隊列中有數據,以后每次"偷看"都會成功。
函數原型如下:
/* 偷看隊列
* xQueue: 偷看哪個隊列
* pvItemToQueue: 數據地址, 用來保存復制出來的數據
* xTicksToWait: 沒有數據的話阻塞一會
* 返回值: pdTRUE表示成功, pdFALSE表示失敗
*/
BaseType_t xQueuePeek(
QueueHandle_t xQueue,
void * const pvBuffer,
TickType_t xTicksToWait
);
BaseType_t xQueuePeekFromISR(
QueueHandle_t xQueue,
void *pvBuffer,
);
5.3 示例8: 隊列的基本使用
本節代碼為:FreeRTOS_08_queue。
本程序會創建一個隊列,然后創建2個發送任務、1個接收任務:
- 發送任務優先級為1,分別往隊列中寫入100、200
- 接收任務優先級為2,讀隊列、打印數值
main函數中創建的隊列、創建了發送任務、接收任務,代碼如下:
/* 隊列句柄, 創建隊列時會設置這個變量 */
QueueHandle_t xQueue;
int main( void )
{
prvSetupHardware();
/* 創建隊列: 長度為5,數據大小為4字節(存放一個整數) */
xQueue = xQueueCreate( 5, sizeof( int32_t ) );
if( xQueue != NULL )
{
/* 創建2個任務用于寫隊列, 傳入的參數分別是100、200
* 任務函數會連續執行,向隊列發送數值100、200
* 優先級為1
*/
xTaskCreate( vSenderTask, "Sender1", 1000, ( void * ) 100, 1, NULL );
xTaskCreate( vSenderTask, "Sender2", 1000, ( void * ) 200, 1, NULL );
/* 創建1個任務用于讀隊列
* 優先級為2, 高于上面的兩個任務
* 這意味著隊列一有數據就會被讀走
*/
xTaskCreate( vReceiverTask, "Receiver", 1000, NULL, 2, NULL );
/* 啟動調度器 */
vTaskStartScheduler();
}
else
{
/* 無法創建隊列 */
}
/* 如果程序運行到了這里就表示出錯了, 一般是內存不足 */
return 0;
}
發送任務的函數中,不斷往隊列中寫入數值,代碼如下:
static void vSenderTask( void *pvParameters )
{
int32_t lValueToSend;
BaseType_t xStatus;
/* 我們會使用這個函數創建2個任務
* 這些任務的pvParameters不一樣
*/
lValueToSend = ( int32_t ) pvParameters;
/* 無限循環 */
for( ;; )
{
/* 寫隊列
* xQueue: 寫哪個隊列
* &lValueToSend: 寫什么數據? 傳入數據的地址, 會從這個地址把數據復制進隊列
* 0: 不阻塞, 如果隊列滿的話, 寫入失敗, 立刻返回
*/
xStatus = xQueueSendToBack( xQueue, &lValueToSend, 0 );
if( xStatus != pdPASS )
{
printf( "Could not send to the queue.\r\n" );
}
}
}
接收任務的函數中,讀取隊列、判斷返回值、打印,代碼如下:
static void vReceiverTask( void *pvParameters )
{
/* 讀取隊列時, 用這個變量來存放數據 */
int32_t lReceivedValue;
BaseType_t xStatus;
const TickType_t xTicksToWait = pdMS_TO_TICKS( 100UL );
/* 無限循環 */
for( ;; )
{
/* 讀隊列
* xQueue: 讀哪個隊列
* &lReceivedValue: 讀到的數據復制到這個地址
* xTicksToWait: 如果隊列為空, 阻塞一會
*/
xStatus = xQueueReceive( xQueue, &lReceivedValue, xTicksToWait );
if( xStatus == pdPASS )
{
/* 讀到了數據 */
printf( "Received = %d\r\n", lReceivedValue );
}
else
{
/* 沒讀到數據 */
printf( "Could not receive from the queue.\r\n" );
}
}
}
程序運行結果如下:
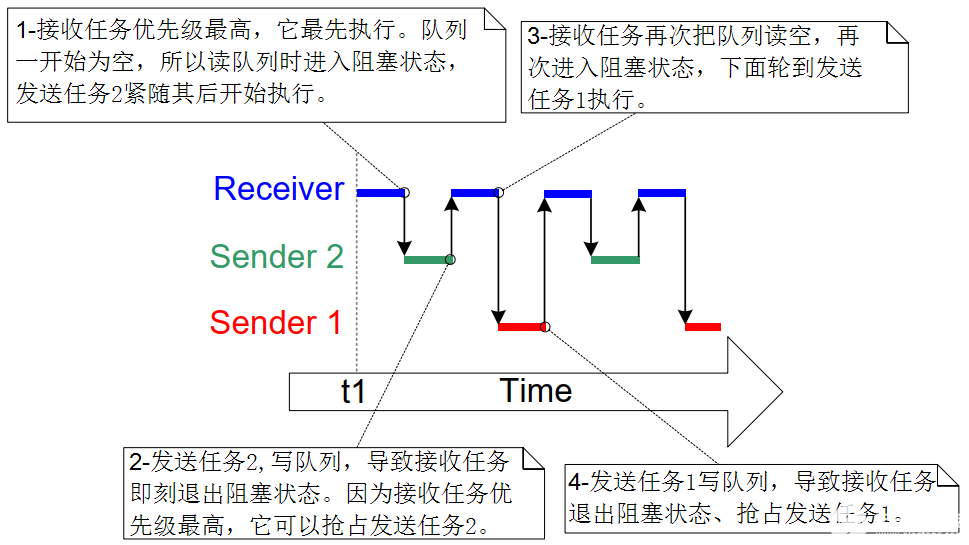
任務調度情況如下圖所示:
5.4 示例9: 分辨數據源
本節代碼為:FreeRTOS_09_queue_datasource。
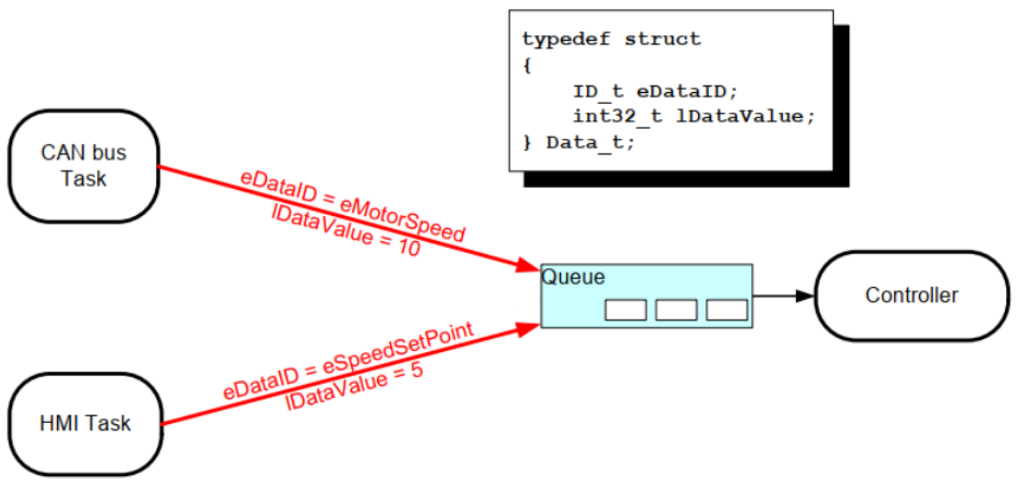
當有多個發送任務,通過同一個隊列發出數據,接收任務如何分辨數據來源?數據本身帶有"來源"信息,比如寫入隊列的數據是一個結構體,結構體中的lDataSouceID用來表示數據來源:
typedef struct {
ID_t eDataID;
int32_t lDataValue;
}Data_t;
不同的發送任務,先構造好結構體,填入自己的eDataID,再寫隊列;接收任務讀出數據后,根據eDataID就可以知道數據來源了,如下圖所示:
- CAN任務發送的數據:eDataID=eMotorSpeed
-
HMI任務發送的數據:eDataID=eSpeedSetPoint
FreeRTOS_09_queue_datasource程序會創建一個隊列,然后創建2個發送任務、1個接收任務:
- 創建的隊列,用來發送結構體:數據大小是結構體的大小
- 發送任務優先級為2,分別往隊列中寫入自己的結構體,結構體中會標明數據來源
- 接收任務優先級為1,讀隊列、根據數據來源打印信息
main函數中創建了隊列、創建了發送任務、接收任務,代碼如下:
/* 定義2種數據來源(ID) */
typedef enum
{
eMotorSpeed,
eSpeedSetPoint
} ID_t;
/* 定義在隊列中傳輸的數據的格式 */
typedef struct {
ID_t eDataID;
int32_t lDataValue;
}Data_t;
/* 定義2個結構體 */
static const Data_t xStructsToSend[ 2 ] =
{
{ eMotorSpeed, 10 }, /* CAN任務發送的數據 */
{ eSpeedSetPoint, 5 } /* HMI任務發送的數據 */
};
/* vSenderTask被用來創建2個任務,用于寫隊列
* vReceiverTask被用來創建1個任務,用于讀隊列
*/
static void vSenderTask( void *pvParameters );
static void vReceiverTask( void *pvParameters );
/*-----------------------------------------------------------*/
/* 隊列句柄, 創建隊列時會設置這個變量 */
QueueHandle_t xQueue;
int main( void )
{
prvSetupHardware();
/* 創建隊列: 長度為5,數據大小為4字節(存放一個整數) */
xQueue = xQueueCreate( 5, sizeof( Data_t ) );
if( xQueue != NULL )
{
/* 創建2個任務用于寫隊列, 傳入的參數是不同的結構體地址
* 任務函數會連續執行,向隊列發送結構體
* 優先級為2
*/
xTaskCreate(vSenderTask, "CAN Task", 1000, (void *) &(xStructsToSend[0]), 2, NULL);
xTaskCreate(vSenderTask, "HMI Task", 1000, (void *) &( xStructsToSend[1]), 2, NULL);
/* 創建1個任務用于讀隊列
* 優先級為1, 低于上面的兩個任務
* 這意味著發送任務優先寫隊列,隊列常常是滿的狀態
*/
xTaskCreate( vReceiverTask, "Receiver", 1000, NULL, 1, NULL );
/* 啟動調度器 */
vTaskStartScheduler();
}
else
{
/* 無法創建隊列 */
}
/* 如果程序運行到了這里就表示出錯了, 一般是內存不足 */
return 0;
}
發送任務的函數中,不斷往隊列中寫入數值,代碼如下:
static void vSenderTask( void *pvParameters )
{
BaseType_t xStatus;
const TickType_t xTicksToWait = pdMS_TO_TICKS( 100UL );
/* 無限循環 */
for( ;; )
{
/* 寫隊列
* xQueue: 寫哪個隊列
* pvParameters: 寫什么數據? 傳入數據的地址, 會從這個地址把數據復制進隊列
* xTicksToWait: 如果隊列滿的話, 阻塞一會
*/
xStatus = xQueueSendToBack( xQueue, pvParameters, xTicksToWait );
if( xStatus != pdPASS )
{
printf( "Could not send to the queue.\r\n" );
}
}
}
接收任務的函數中,讀取隊列、判斷返回值、打印,代碼如下:
static void vReceiverTask( void *pvParameters )
{
/* 讀取隊列時, 用這個變量來存放數據 */
Data_t xReceivedStructure;
BaseType_t xStatus;
/* 無限循環 */
for( ;; )
{
/* 讀隊列
* xQueue: 讀哪個隊列
* &xReceivedStructure: 讀到的數據復制到這個地址
* 0: 沒有數據就即刻返回,不阻塞
*/
xStatus = xQueueReceive( xQueue, &xReceivedStructure, 0 );
if( xStatus == pdPASS )
{
/* 讀到了數據 */
if( xReceivedStructure.eDataID == eMotorSpeed )
{
printf( "From CAN, MotorSpeed = %d\r\n", xReceivedStructure.lDataValue );
}
else if( xReceivedStructure.eDataID == eSpeedSetPoint )
{
printf( "From HMI, SpeedSetPoint = %d\r\n", xReceivedStructure.lDataValue );
}
}
else
{
/* 沒讀到數據 */
printf( "Could not receive from the queue.\r\n" );
}
}
}
運行結果如下:
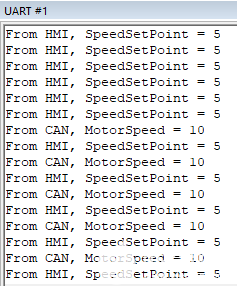
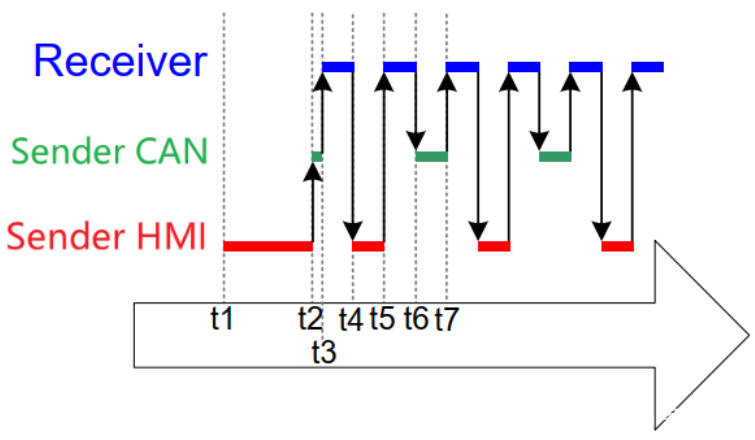
任務調度情況如下圖所示:
- t1:HMI是最后創建的最高優先級任務,它先執行,一下子向隊列寫入5個數據,把隊列都寫滿了
- t2:隊列已經滿了,HMI任務再發起第6次寫操作時,進入阻塞狀態。這時CAN任務是最高優先級的就緒態任務,它開始執行
- t3:CAN任務發現隊列已經滿了,進入阻塞狀態;接收任務變為最高優先級的就緒態任務,它開始運行
- t4:現在,HMI任務、CAN任務的優先級都比接收任務高,它們都在等待隊列有空閑的空間;一旦接收任務讀出1個數據,會馬上被搶占。被誰搶占?誰等待最久?HMI任務!所以在t4時刻,切換到HMI任務。
- t5:HMI任務向隊列寫入第6個數據,然后再次阻塞,這是CAN任務已經阻塞很久了。接收任務變為最高優先級的就緒態任務,開始執行。
- t6:現在,HMI任務、CAN任務的優先級都比接收任務高,它們都在等待隊列有空閑的空間;一旦接收任務讀出1個數據,會馬上被搶占。被誰搶占?誰等待最久?CAN任務!所以在t6時刻,切換到CAN任務。
- t7:CAN任務向隊列寫入數據,因為僅僅有一個空間供寫入,所以它馬上再次進入阻塞狀態。這時HMI任務、CAN任務都在等待空閑空間,只有接收任務可以繼續執行。
5.5 示例10: 傳輸大塊數據
本節代碼為:FreeRTOS_10_queue_bigtransfer。
FreeRTOS的隊列使用拷貝傳輸,也就是要傳輸uint32_t時,把4字節的數據拷貝進隊列;要傳輸一個8字節的結構體時,把8字節的數據拷貝進隊列。
如果要傳輸1000字節的結構體呢?寫隊列時拷貝1000字節,讀隊列時再拷貝1000字節?不建議這么做,影響效率!
這時候,我們要傳輸的是這個巨大結構體的地址:把它的地址寫入隊列,對方從隊列得到這個地址,使用地址去訪問那1000字節的數據。
使用地址來間接傳輸數據時,這些數據放在RAM里,對于這塊RAM,要保證這幾點:
-
RAM的所有者、操作者,必須清晰明了
這塊內存,就被稱為"共享內存"。要確保不能同時修改RAM。比如,在寫隊列之前只有由發送者修改這塊RAM,在讀隊列之后只能由接收者訪問這塊RAM。 -
RAM要保持可用
這塊RAM應該是全局變量,或者是動態分配的內存。對于動然分配的內存,要確保它不能提前釋放:要等到接收者用完后再釋放。另外,不能是局部變量。
FreeRTOS_10_queue_bigtransfer程序會創建一個隊列,然后創建1個發送任務、1個接收任務:
- 創建的隊列:長度為1,用來傳輸"char *"指針
- 發送任務優先級為1,在字符數組中寫好數據后,把它的地址寫入隊列
- 接收任務優先級為2,讀隊列得到"char *"值,把它打印出來
這個程序故意設置接收任務的優先級更高,在它訪問數組的過程中,接收任務無法執行、無法寫這個數組。
main函數中創建了隊列、創建了發送任務、接收任務,代碼如下:
/* 定義一個字符數組 */
static char pcBuffer[100];
/* vSenderTask被用來創建2個任務,用于寫隊列
* vReceiverTask被用來創建1個任務,用于讀隊列
*/
static void vSenderTask( void *pvParameters );
static void vReceiverTask( void *pvParameters );
/*-----------------------------------------------------------*/
/* 隊列句柄, 創建隊列時會設置這個變量 */
QueueHandle_t xQueue;
int main( void )
{
prvSetupHardware();
/* 創建隊列: 長度為1,數據大小為4字節(存放一個char指針) */
xQueue = xQueueCreate( 1, sizeof(char *) );
if( xQueue != NULL )
{
/* 創建1個任務用于寫隊列
* 任務函數會連續執行,構造buffer數據,把buffer地址寫入隊列
* 優先級為1
*/
xTaskCreate( vSenderTask, "Sender", 1000, NULL, 1, NULL );
/* 創建1個任務用于讀隊列
* 優先級為2, 高于上面的兩個任務
* 這意味著讀隊列得到buffer地址后,本任務使用buffer時不會被打斷
*/
xTaskCreate( vReceiverTask, "Receiver", 1000, NULL, 2, NULL );
/* 啟動調度器 */
vTaskStartScheduler();
}
else
{
/* 無法創建隊列 */
}
/* 如果程序運行到了這里就表示出錯了, 一般是內存不足 */
return 0;
}
發送任務的函數中,現在全局大數組pcBuffer中構造數據,然后把它的地址寫入隊列,代碼如下:
static void vSenderTask( void *pvParameters )
{
BaseType_t xStatus;
static int cnt = 0;
char *buffer;
/* 無限循環 */
for( ;; )
{
sprintf(pcBuffer, "www.100ask.net Msg %d\r\n", cnt++);
buffer = pcBuffer; // buffer變量等于數組的地址, 下面要把這個地址寫入隊列
/* 寫隊列
* xQueue: 寫哪個隊列
* pvParameters: 寫什么數據? 傳入數據的地址, 會從這個地址把數據復制進隊列
* 0: 如果隊列滿的話, 即刻返回
*/
xStatus = xQueueSendToBack( xQueue, &buffer, 0 ); /* 只需要寫入4字節, 無需寫入整個buffer */
if( xStatus != pdPASS )
{
printf( "Could not send to the queue.\r\n" );
}
}
}
接收任務的函數中,讀取隊列、得到buffer的地址、打印,代碼如下:
static void vReceiverTask( void *pvParameters )
{
/* 讀取隊列時, 用這個變量來存放數據 */
char *buffer;
const TickType_t xTicksToWait = pdMS_TO_TICKS( 100UL );
BaseType_t xStatus;
/* 無限循環 */
for( ;; )
{
/* 讀隊列
* xQueue: 讀哪個隊列
* &xReceivedStructure: 讀到的數據復制到這個地址
* xTicksToWait: 沒有數據就阻塞一會
*/
xStatus = xQueueReceive( xQueue, &buffer, xTicksToWait); /* 得到buffer地址,只是4字節 */
if( xStatus == pdPASS )
{
/* 讀到了數據 */
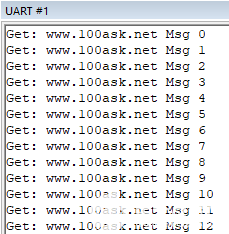
printf("Get: %s", buffer);
}
else
{
/* 沒讀到數據 */
printf( "Could not receive from the queue.\r\n" );
}
}
}
運行結果如下圖所示:
5.6 示例11: 郵箱(Mailbox)
本節代碼為:FreeRTOS_11_queue_mailbox。
FreeRTOS的郵箱概念跟別的RTOS不一樣,這里的郵箱稱為"櫥窗"也許更恰當:
- 它是一個隊列,隊列長度只有1
-
寫郵箱:新數據覆蓋舊數據,在任務中使用
xQueueOverwrite(),在中斷中使用xQueueOverwriteFromISR()。
既然是覆蓋,那么無論郵箱中是否有數據,這些函數總能成功寫入數據。 -
讀郵箱:讀數據時,數據不會被移除;在任務中使用
xQueuePeek(),在中斷中使用xQueuePeekFromISR()。
這意味著,第一次調用時會因為無數據而阻塞,一旦曾經寫入數據,以后讀郵箱時總能成功。
main函數中創建了隊列(隊列長度為1)、創建了發送任務、接收任務:
- 發送任務的優先級為2,它先執行
- 接收任務的優先級為1
代碼如下:
/* 隊列句柄, 創建隊列時會設置這個變量 */
QueueHandle_t xQueue;
int main( void )
{
prvSetupHardware();
/* 創建隊列: 長度為1,數據大小為4字節(存放一個char指針) */
xQueue = xQueueCreate( 1, sizeof(uint32_t) );
if( xQueue != NULL )
{
/* 創建1個任務用于寫隊列
* 任務函數會連續執行,構造buffer數據,把buffer地址寫入隊列
* 優先級為2
*/
xTaskCreate( vSenderTask, "Sender", 1000, NULL, 2, NULL );
/* 創建1個任務用于讀隊列
* 優先級為1
*/
xTaskCreate( vReceiverTask, "Receiver", 1000, NULL, 1, NULL );
/* 啟動調度器 */
vTaskStartScheduler();
}
else
{
/* 無法創建隊列 */
}
/* 如果程序運行到了這里就表示出錯了, 一般是內存不足 */
return 0;
}
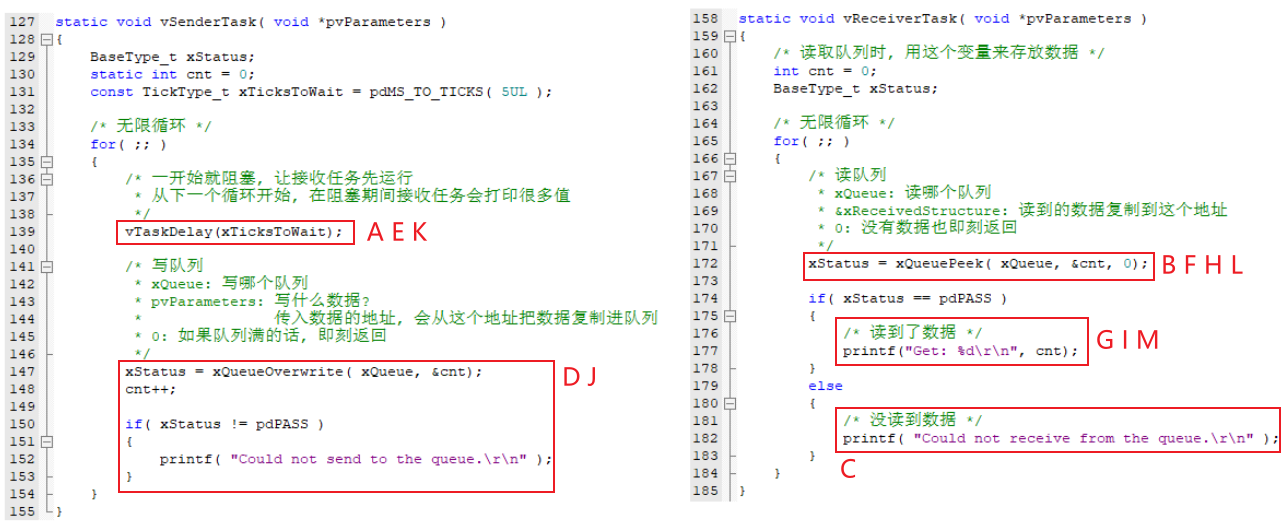
發送任務、接收任務的代碼和執行流程如下:
- A:發送任務先執行,馬上阻塞
- BC:接收任務執行,這是郵箱無數據,打印"Could not …"。在發送任務阻塞過程中,接收任務多次執行、多次打印。
- D:發送任務從阻塞狀態退出,立刻執行、寫隊列
- E:發送任務再次阻塞
- FG、HI、……:接收任務不斷"偷看"郵箱,得到同一個數據,打印出多個"Get: 0"
- J:發送任務從阻塞狀態退出,立刻執行、覆蓋隊列,寫入1
- K:發送任務再次阻塞
- LM、……:接收任務不斷"偷看"郵箱,得到同一個數據,打印出多個"Get: 1"
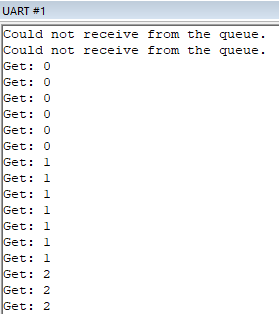
運行結果如下圖所示:
-
嵌入式
+關注
關注
5083文章
19131瀏覽量
305492 -
Linux
+關注
關注
87文章
11310瀏覽量
209598 -
函數
+關注
關注
3文章
4332瀏覽量
62656 -
RTOS
+關注
關注
22文章
814瀏覽量
119669 -
FreeRTOS
+關注
關注
12文章
484瀏覽量
62199
發布評論請先 登錄
相關推薦
韋東山freeRTOS系列教程之信號量(6)
FreeRTOS發送消息隊列失敗的解決辦法?
Queue隊列的作用是什么
消息隊列Queue相關資料推薦
韋東山freeRTOS系列教程:入門文檔教程+進階視頻教程
韋東山freeRTOS教程之FreeRTOS概述與體驗(1)

韋東山freeRTOS系列教程之內存管理(2)
FreeRTOS學習(五)消息隊列和二值信號量 xQueue / xSemaphore

FreeRTOS 隊列 信號量 互斥量
ThreadX(九)------消息隊列Queue
FreeRTOS系列第18篇---FreeRTOS隊列API函數
隊列Queue的常用方法有哪些
STM32G0開發筆記:使用FreeRTOS系統的隊列Queue
FreeRTOS消息隊列結構體





 工商網監
工商網監
評論