 抖動傳遞及其性能以及相位噪聲測量技術的局限性
抖動傳遞及其性能以及相位噪聲測量技術的局限性
在本文中,我們將討論抖動傳遞及其性能,以及相位噪聲測量技術的局限性。
時鐘抖動和邊沿速率
圖1顯示了由一個通用公式表述的三種波形。該公式包括相位噪聲項“φ(t)”和幅度噪聲項“λ(t)。對評估的三個頻率來說,φ(t)=0和λ(t)是個偽隨機函數,該函數為每個波形都產生噪聲的恒定包絡。圖1顯示三個波形中每一波形的Vth穿越分解視圖,以及Vth可被穿越的位置分布。
圖1強調了噪聲源而不是固有抖動會引起定時抖動錯誤。更快的邊沿速率減少了時鐘信號上的電壓噪聲對時鐘抖動性能的影響。這種現象并非是僅屬于時鐘信號的特點。在接收時鐘信號或測量抖動性能的設備內,這種機理也表現得很明顯。
時鐘性能測量
工程師常常會評估無意義的實驗室結果;而時鐘性能測量的問題尤其嚴重。例如,你可使用示波器和相位噪聲分析儀(PNA)測量隨機抖動。不過,結果有時會大相徑庭。為了更好地理解這些結果,圖2描述了一些實驗過程,其結果如表1所示。
例如,ONET1191P是一個為高速應用優化了的限幅放大器(LA)。我們用這個放大器來縮短時鐘信號的上升和下降時間,在本例,是從約200ps縮短至35ps。
請注意,該LA的使用,在示波器和PNA上得到不同的結果。PNA的結果與預期的相同(例如,增加了LA的同時也增加了噪聲)。但LA顯著改善了來自示波器的結果。
結論
上述結果與圖1所示的邊沿速率和抖動傳遞機制相關。噪聲源來自示波器的前端,而不是時鐘信號包含的噪聲成分。公式1是示波器抖動噪底的一種表述。它包括示波器時基的抖動、示波器前端的噪聲(Vnoise)以及被測信號的壓擺率。
責任編輯:haq
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
示波器
+關注
關注
113文章
6281瀏覽量
185695 -
模擬
+關注
關注
7文章
1429瀏覽量
83959 -
時鐘
+關注
關注
11文章
1746瀏覽量
131707
發布評論請先 登錄
相關推薦
ChirpIoT技術的優勢以及局限性
無線通信技術。相關產品型號有E29-400T22D、E290-400MM20S、E290-900T20S、E290-400T30S等國產lora模塊,該系列無線模塊相關性能參數和功能特點可點擊查看。 一


可編程振蕩器的特點、優勢與局限性及其相位噪聲和抖動的優化
隨著電子設備的不斷進步,對頻率源的靈活性和性能要求也越來越高。可編程振蕩器作為一種能夠通過編程設定輸出頻率的晶體振蕩器,因其獨特的特點和優勢,廣泛應用于各種需要靈活頻率配置的電子設備中。
微通道反應器目前的局限性
,可以實現物料的瞬間均勻混合和高效的傳熱,因此許多在常規反應器中無法實現的反應都可以微反應器中實現。 從結構特點上來說,目前微通道反應器應用與局限性如下 1. 反應本身速度很快,但受制于傳遞過程的,整體反應速度偏
相位噪聲對收發信機的影響
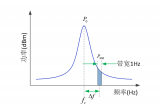
相位噪聲是衡量振蕩器性能的核心指標,通常也被稱為相位抖動,其定義為在某一頻率偏移Δf處1Hz寬帶內的單邊噪聲信號積分功率和載波信號功率比值,
應對高速芯片從相位噪聲到時間抖動的挑戰
AnaPico公司的APPH系列相噪分析儀以-190dBc/Hz的本底噪聲和小于5fs本底抖動而具有極高的靈敏度,能夠以高于時域抖動的靈敏度測量頻域中的

高光譜成像技術如何改善現有遙感技術的局限性?
隨著科技的不斷進步,遙感技術在地球觀測、資源管理、環境監測等領域中發揮著日益重要的作用。然而,傳統的遙感技術在分辨率、準確性和信息獲取能力等方面存在一定的局限性。為了克服這些局限性,高






 工商網監
工商網監
評論