 GNSS+IMU+MM車載高精度組合導航定位系統對比分析
GNSS+IMU+MM車載高精度組合導航定位系統對比分析
前言:近年來,隨著定位業務的迅速發展,用戶對于車載端定位精度提出了越來越高的要求,由原來的導航級逐漸更替到車道級。特別是在城市峽谷環境下(高樓、高架),用戶無法接收到GNSS信號或GNSS信號受干擾,導致GNSS無定位結果或定位精度差。這是“有源定位”固有的缺點,無法從算法上來克服。針對這個問題,以GNSS+IMU等多傳感器融合方案越來越受到重視,因為“無源定位”的IMU恰好可以彌補衛星定位的短板。
1.基礎原理
導航衛星系統(GNSS)
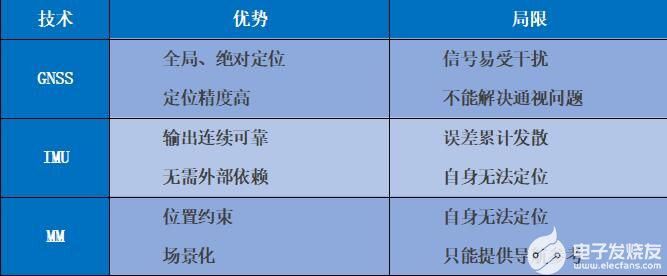
全球導航衛星系統(Global Navigation Satellite System)是一種依靠衛星衛星的偽距載波、星歷、時間以及鐘差等信息進行實時定位的空基無線電導航系統,能在地球表面或近地空間的任何地點為用戶提供全天候的三維坐標和速度以及時間信息。GNSS系統的優點是精度高、誤差穩定不發散,但容易受到周圍環境影響,比如樹木樓房遮擋,鏡面等高反射物體引起的多路徑效應。
慣性導航系統(IMU)
慣性導航系統(Inertial Navigation System)是一種不依賴于外部信息、也不向外部輻射能量(如無線電導航那樣)的自主式導航系統,主要使用慣性測量單元IMU(Inertial measurementunit)。其工作環境不僅包括空中、地面,還可以在水下。慣性導航的基本工作原理是以牛頓力學定律為基礎,通過測量載體在慣性參考系的加速度,將它對時間進行積分,且把它變換到導航坐標系中,就能夠得到在導航坐標系中的速度、偏航角和位置等信息。其優點是工作不需要通時,安裝位置隨意,定位范圍全場景,但定位精度不高,且誤差隨時間發散。與GNSS導航系統互補。
地圖匹配技術(MM)
地圖匹配技術MM(Map matching)是結合用戶位置信息和地圖數據,推算用戶在地圖上道路的準確位置,輔助車載導航的精準控制。
航位推算法(DR)
航位推算法DR(Dead Reckoning)是一種跟蹤導航算法,在獲取載體當前時刻坐標位置的前提下,依靠慣性測量單元IMU取得的同周期內載體移動的距離和方位,進而推算下一時刻位置。在此文介紹中,主要講建立在已有GNSS系統解算下,IMU輔助進行組合導航的算法。

2,車載定位的痛點
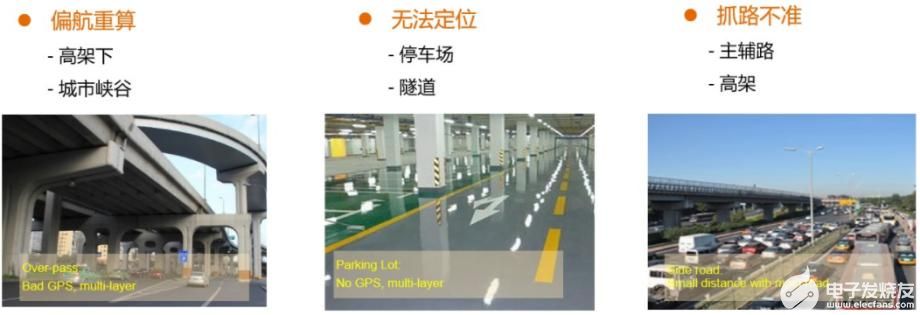
車載導航定位發展已經很久,但隨著精度要求越來越高,車載定位的一些問題也逐漸浮現:
偏航重算:是指在高架或城市峽谷,信號遮擋引起位置點漂移;
無法定位:是指在無信號區域(停車場、隧道)推算的精度低,導致出口誤差大;
抓路錯誤:是指主輔路、高架上下抓路錯誤。
其中偏航重算和無法定位主要是GNSS定位原理決定,GNSS定位精度受觀測環境影響,難以改善;對于抓路錯誤,直接原因是正確道路與誤抓道路相隔太近,受定位精度限制無法區分;根本原因是只使用位置信息進行抓路,沒有發揮其它數據的價值。
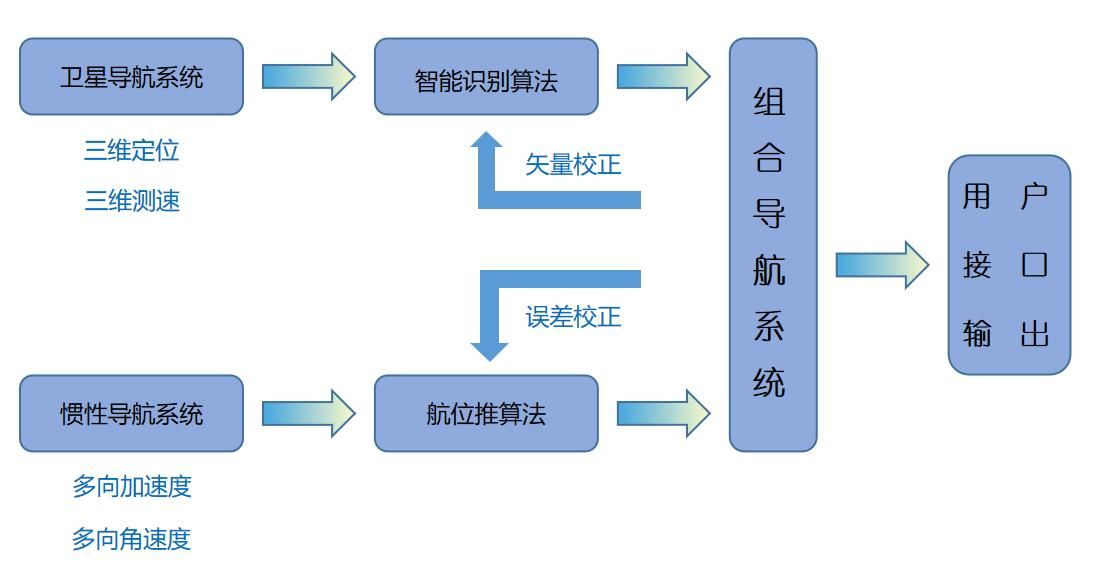
3,技術方案
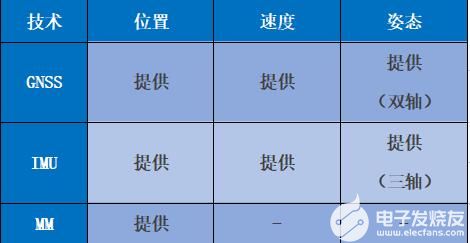
以上介紹的關鍵技術中,在場景覆蓋以及精度上,各有所長,互相補充。
根據主流這三種定位技術進行融合,提出GNSS+IMU+MM方案,依靠算法(DR)+數據(POS/HEAD)提高定位的可靠性。
從上述車載定位的幾大問題,可以逐步拆分解決:
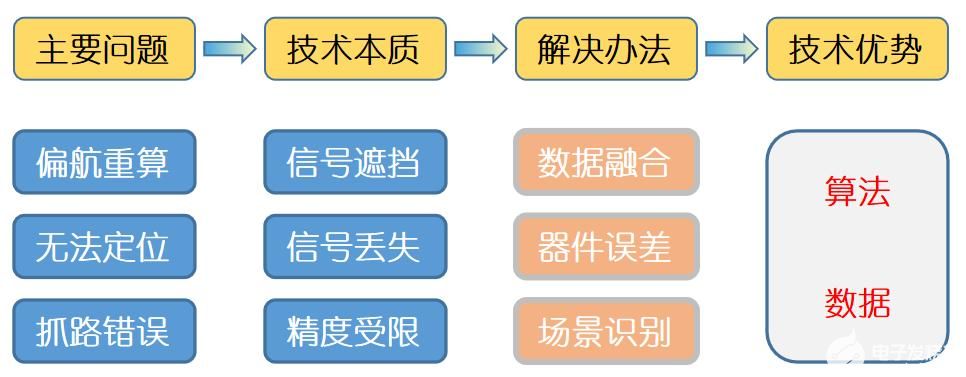
數據融合:這一部分主要是計算GNSS模塊輸出的位置、速度、時間和航向信息,將其數據傳遞至數據處理終端進行實時數據融合計算,判定當前GNSS數據質量的好壞,根據其數據質量組合不同的定位判斷策略。
器件補償:在GNSS信號質量不好或無法定位的時候,只能依靠IMU的DR算法進行補償。補償模塊的主要功能是利用GNSS數據來補償速度敏感器誤差參數(比例因子)和IMU的誤差參數(陀螺儀天向比例因子和陀螺儀三軸零偏)。補償的目的是在無GPS信號或弱GPS信號的場景,僅靠DR算法也能得到較為可靠的導航信息(通常短時間也能保證厘米級定位)。
場景識別:依靠內置場景化地圖數據源以及實時外部傳感器收集的環境信息進行場景判斷,確定此刻載體地圖位置,輔助系統對于周圍環境感知進行行為判斷。一般采用高精度街景地圖源、激光雷達和毫米波雷達進行環境感知。
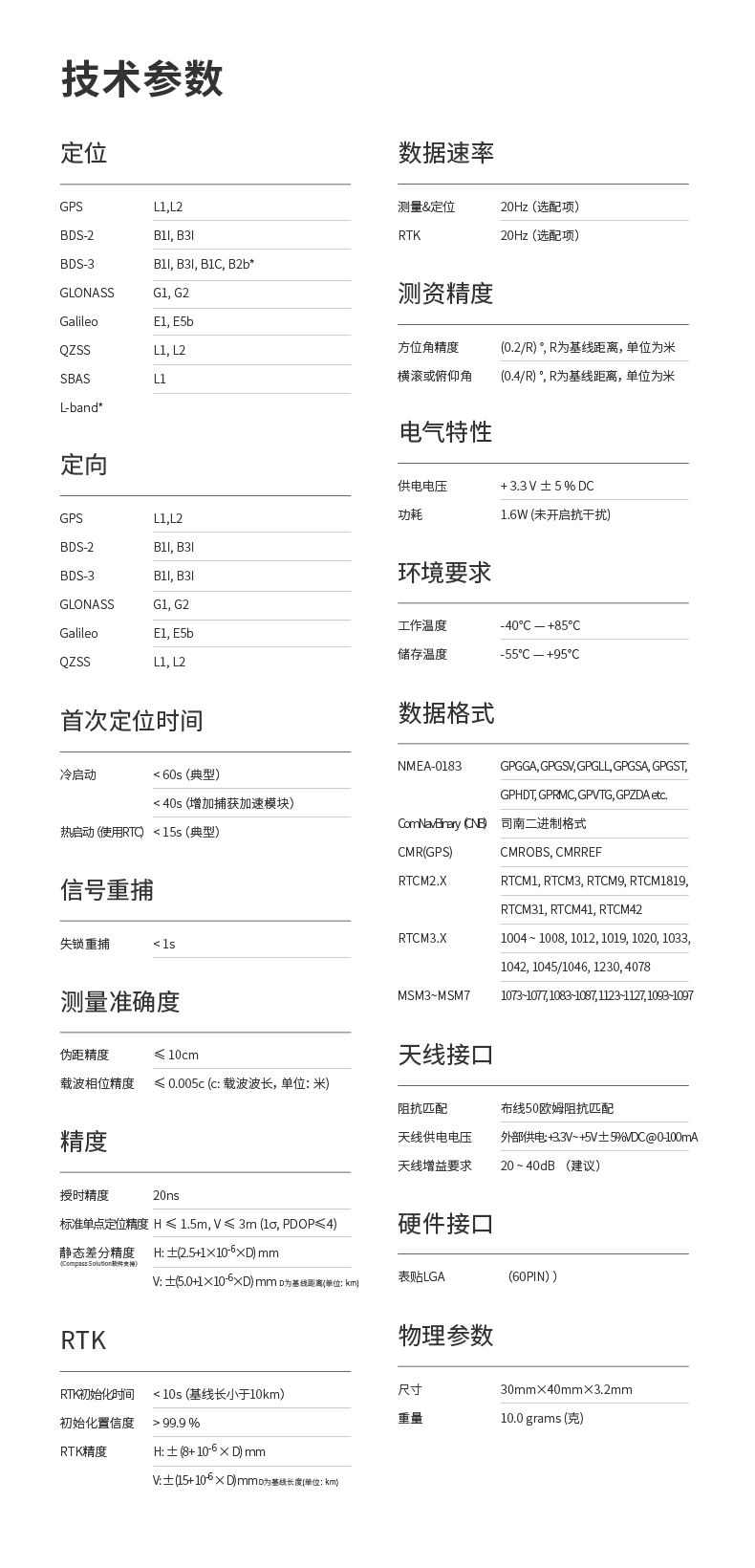
以七星耀華S823模塊為例,采用自適應組合導航設計,支持RTCM2.X/3.X差分數據格式接入,在空曠環境可實現厘米級的定位精度;內置一體化慣導模塊,可以實現在復雜環境下的高精度導航。
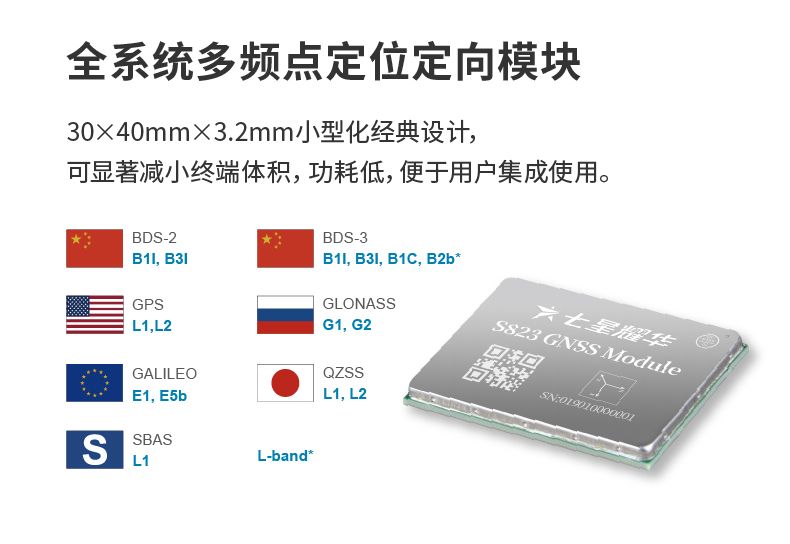
依靠于自主研發的高精度定位算法,根據車載載體當前運行環境,系統自適應對當前衛星質量進行評估,依據衛星質量進行組合導航。
當衛星條件良好時,以衛星導航為主,結合高精度RTK算法,實時定位精度≤±2.5cm,測速精度優于0.03m/s;當衛導無法正常工作時,以慣性導航為主導,3S內精度保持厘米級,10S內精度保持米級。
-
定位系統
+關注
關注
10文章
585瀏覽量
36495 -
導航
+關注
關注
7文章
531瀏覽量
42455 -
GNSS
+關注
關注
9文章
776瀏覽量
48015 -
IMU
+關注
關注
6文章
316瀏覽量
45805
發布評論請先 登錄
相關推薦
高性能單片機車載慣性和GPS組合導航模塊
基于MSP430F149單片機設計的室外移動機器人組合導航定位系統
如何深入了解GNSS,打造更高精度、更高效的導航定位?
AVT1200 北斗高精度車載定位終端
廣和通與華大北斗達成全球戰略合作,攜手打造高精度GNSS定位解決方案
ADI與北云科技合作推出高精度組合導航板卡,加速自動駕駛系統的商業化進程
GNSS+IMU+MM車載組合導航系統解決方案
高精度車載GNSS定位導航模塊怎么選,車載導航定位模塊介紹

高精度GNSS定位定向模組M20D實現無人配送車導航定位的原理

基于ST第五代高精度定位芯片的車載定位P-BOX方案

高精度GNSS+INS組合導航:速度、位置、姿態全掌握






 工商網監
工商網監
評論