

在無人機領域,大疆一直都行走在第一隊列,各款消費級無人機層出不窮,去年的人氣王MavicAir2,今年的FJIFPV和DJIAir2S。大疆無人機在中國市場的占有率為90%,在全球市場的占有率為70%,而在美國市場的占有率接近80%,以至于大家可以頻頻在各類好萊塢大片中看到大疆無人機的身影。
所謂無人機,就是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛機,機上不配備駕駛艙,不需要飛行員駕駛,內部配置有駕駛儀等控制裝置。近年來,無人機在民用、軍事和科研等領域被廣泛應用,例如偵察監視、對地攻擊、交通巡邏等。其中,在無人機的飛行控制中,飛行姿態是重要參數之一,慣性導航系統是較為常用的一種導航方式。
一、傳感器件
對于飛行器而言,姿態角的解算進度和導航精度密切相關,因此姿態解算和實時更新是導航系統的重點。加速度計和陀螺儀是姿態解算的主要器件。
加速度計測量載體所受到的加速度力的大小,當加速度計保持穩定不動時,測量的數據即為重力在三維平面上的投影生成的反作用力的大小。僅僅利用三軸加速度計可以實現姿態角的估計,但是由于三軸加速度計動態響應較慢,若僅使用加速度計獲取姿態角,會產生較大的延時,并且在運動過程中,姿態解算精度較低。
陀螺儀是測量載體繞轉軸轉動的角速度,又稱角速度計。當載體以某個速率運動時,可以通過測量哥氏加速度獲取三維空間轉動的角速率。理論上,對角速率進行積分既可獲取載體額姿態角信息,但是由于陀螺儀的測量會受到漂移誤差的影響,對于有規律的漂移,可以通過建立數學模型進行補償,但是對于隨機漂移誤差的補償尚未出現特別有效的方法。因此,僅利用陀螺儀解算姿態角也是不合適的。
二、慣性導航系統
1、工作原理
慣性導航系統通過對總的增量進行積分運算獲取位置和姿態信息,主要可分為平臺式慣性導航系統和捷聯式慣性導航系統。
平臺慣慣性導航系統中將加速度計和陀螺儀安裝在導航平臺上,用導航平臺模擬導航坐標系,沿著導航坐標系軸向將導航加速度計固定測量軸方向,進而加速度計即可獲取飛行器在導航坐標系中的加速度,再利用幾何方法,從平臺上獲取飛行器的姿態和航向信息。
捷聯慣性導航系統是將加速度計和陀螺儀直接固連在飛行器上,而不是采用機械式的陀螺穩定平臺。按照飛行器的滾轉軸、俯仰軸和偏航軸的方向確定加速度計和陀螺儀的輸入軸,
利用姿態矩陣,將三軸加速度計和三軸陀螺儀測量的飛行器沿機體坐標系軸向的加速度和角速度信息,變換至導航坐標系中,進而獲取飛行器的速度、位置、姿態信息。
兩種慣性導航系統相比之下,捷聯慣性導航系統具有自主式的導航方法,系統的可靠性高于平臺慣性導航系統。
2、導航系統融合算法
鑒于加速度計和陀螺儀頻域特性互補的特點,可以融合兩者的原始數據進行姿態解算。下面主要介紹互補濾波和卡爾曼濾波兩種常用融合算法。
1.互補濾波:
互補濾波器通常用于將不同傳感器測量的物理意義相似或者相同的數據進行融合,對于輸入的多個輸入量需要進行相應的預處理,即具有高頻噪聲的輸入量,需要使用低通濾波器進行濾波。在飛行器姿態測量中,對于加速度計輸入的變量通常需要進行低通濾波,對于陀螺儀輸入的變量會進行高通濾波。
下圖是一種常見的二階互補濾波算法實現框圖。
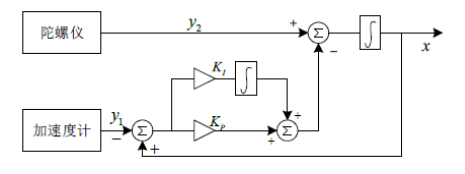
在二階互補濾波中,對輸出值x與加速度計的測量值y1作差,然后將差值通過PI控制器進行處理后,以負反饋形式對陀螺儀測量值進行校正,簡化的姿態角計算公式為

其中,Anglek為第k次濾波后的角度,Anglek-1為第k-1次濾波處理后的角度,angle_rate為陀螺儀測量的角速度值,t 為陀螺儀采樣間隔時間。Angle_acc為加速度計的角度測量值,a為高通濾波系數,b為低通濾波系數,兩者均為定值,且在系統工作過程中,該權值不會改變。
2.卡爾曼濾波
卡爾曼濾波是將最小均方誤差作為標準進行最優估計。首先,將離散系統的控制過程用下面的方程進行表達。

k代表的是離散時間,X(K)代表的是k時刻的狀態,U(k)代表的是k時刻的控制量,W(k)則代表的是干擾量,其表現形式為高斯白噪聲,干擾量的協方差記作Q。M、N 代表系統的固有參數,當系統是多模型系統時,M、N表現為多維向量的形式。Z(k)代表的是k時刻的測量值,V(k)代表的是測量時的干擾信號,其協方差記為R,P是測量系統的固有參數。
卡爾曼濾波過程:
首先根據系統在k-1時刻的狀態量X(k-1)估算其在下一時刻的狀態量x(k|k-1),根據系統總體的運行機制,有:

然后對x(k|k-1)的協方差進行估算,S(k|k-1)表示X(k|k-1)的協方差,S(k-|k-1)則表示x(k-1|k-1)的協方差。

將測量值和估算值進行融合,

x(k|k-1)表示系統在k時刻計算出的最優狀態值。G(k)是卡爾曼增益,其意義是在指導數據融合時,應該更加信任測量值,還是更加信任估算值.
那么G(k)如何計算?

不同于互補濾波,卡爾曼濾波中的參數不是固定的,其與系統固有參數和干擾量都有關。進一步的,為保持系統的動態實時更新,需要對x(k|k)的協方差進行更新,即

三、光流導航系統
除了常見捷聯慣導系統,光流導航系統也是近年來應用和研究較多的導航系統。光流導航系統是模仿生物的眼睛感受光的變化設計相關算法,將二維圖像中的像素通過數學建模與三維載體進行關聯,通過光流圖像連續幀的變化,計算得到載體的運動信息。美國楊百翰大學的研究團隊首次將光流導航技術應用在無人機上,使用了光電鼠標技術和激光測距。
在光流導航系統中,利用計算機視覺進行導航時通常是利用兩幀連續圖片的特征點之間的關系建立變化坐標,由此來判斷無人機的運動信息。進行位置判斷的關鍵是解決圖像之間的特征點的提取以及匹配,并且由此建立起基于特征點的位置估計方程,設計出相應的光流導航算法。
基于特征點算法可以獲取光流數據,但只是坐標信息,需要進行相應標定和轉化。
在光流傳感器相機標定中,為獲取實際物體與圖像中物體的轉化關系,需要求出相機的內參矩陣和外參矩陣,即用一定尺寸的相機,在不同的視角下對同一個物體進行拍照,接著通過這些圖像求得相機的內外參矩陣。內參矩陣由相機本身決定,外參矩陣由拍照的不同角度決定。
通過內外參矩陣,可以求出無人機上的光流傳感器與光流場之間的對應關系,將光流信息轉換成無人機的速度信息。為了獲取無人機的運動信息,需要利用無人機的高度信息和載體坐標和地面坐標的轉換矩陣。
因為當光線條件不好時,僅利用光流傳感器將導致較大的誤差。因此,將光流導航系統經常與慣性導航系統組合使用,可以互相彌補。光流/慣性松耦合模型是利用光流與慣導系統中的速度建立聯系,利用光流系統對慣導系統進行數據修正,如下圖所示。
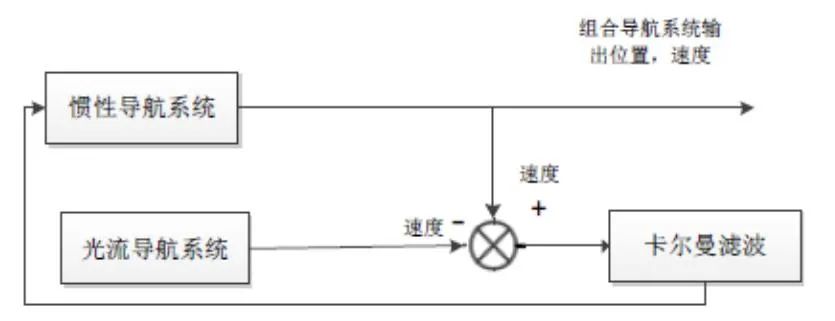
利用光流導航系統的速度與慣導系統的速度作差,得到速度測量方程
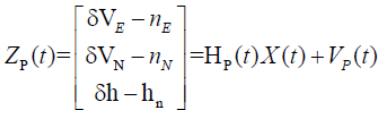
Zp是觀察矩陣,即慣導系統和光流導航系統提供的數據,Hp是測量轉移矩陣,Vp是測量噪聲矩陣,X 是t 時刻的狀態矢量。VE-nE,VN-nN 表示慣導系統與光流導航系統之間速度的差值,h-hn表示慣導系統與光流導航系統之間位置的差值。
導航技術以及MEMS技術等理論的進步降低了無人機的生產、使用以及維護成本,使得無人機的應用范圍逐漸擴大,與此同時,無人機的安全問題不可忽視,尤其是在復雜情況下更需要提高飛行的穩定性,多傳感器融合和姿態解算具有重要的研究和應用意義。
作者:凌霄
浙江大學機械電子專業博士,從事智能傳感與人機交互,智能機器人控制等領域的研究
責任編輯:lq
-
導航系統
+關注
關注
2文章
268瀏覽量
31030 -
無人機
+關注
關注
230文章
10623瀏覽量
184323
原文標題:無人機導航系統的多傳感融合和姿態解算
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

無人機低延時目標跟蹤識別智算系統
北斗模塊在無人機領域的革新應用與未來展望
革新無人機導航:如何重新定義IMU高性能低成本
澳大利亞科研團隊推出創新天文導航系統,革新無人機定位技術
精準導航的關鍵:揭秘GNSS模擬器在無人機行業的核心作用
精準到“厘米級”!組合導航系統讓你的無人機更加震撼
從姿態到飛行控制,IMU全方位守護無人機飛行

霍爾傳感器在無人機中的應用


大疆無人機是靠wifi還是gps
無人機干擾器干擾手機信號嗎





 工商網監
工商網監

評論