 簡述擺臂涂膠桶STEP控制的一些感悟
簡述擺臂涂膠桶STEP控制的一些感悟
首先規劃會給你關于涂膠控制的兩套MAKRO設置,一種是正常的控制擺臂膠桶的MAKRO程序,第二種是利用MAKRO去激活STEP來執行膠桶擺臂。第二種的控制更復雜,更具安全性,當你只執行MAKRO程序時,是不能激活STEP的。
下面簡單介紹一下,涂膠STEP.
關鍵點:
A2113 開啟先導閥
A2116 膠桶擺回
A2118 抱閘釋放
A2116膠桶擺回
A2117保持釋放到最終位置(泄壓)
1.SPSMAKRO185擺臂伸出接膠,當執行完STEP的內容后,必須要用SPSMAKRO187關閉F355
;FOLD 50: SPSMAKRO185 = !E2115 & (E1534 + E163) & !E15 ----控制擺臂伸出;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO185 = !E2115 & (E1534 +E163) & !E15,3:MAKRO
;ENDFOLD
;FOLD 51: WARTE BIS !E163 & !E1534 + E2115 + E15 + F355 -等待擺臂伸出到位 ;%{SE}%MKUKATPVW %CVW_SPS %VWBOASG %P 2:WARTEBIS !E163 & !E1534 + E2115 + E15 + F355,3:WBOASG
;ENDFOLD ;ENDFOLD
;FOLD 53: WARTE ( EIN ) ZEIT 2 [1/10Sek] ;%{SE}%MKUKATPVW %CVW_SPS %VWTASG %P 2:WARTE ( EIN ) ZEIT 2[1/10Sek],3:WTASG
;ENDFOLD
;FOLD 54: SPSMAKRO187 = F355 初始化擺臂控制信號;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO187 =F355,3:MAKRO
;ENDFOLD
SPSMAKRO185擺臂撤回膠桶同樣需要SPSMAKRO187的存在
;FOLD 59: SPSMAKRO186 = !E2116 -------控制擺臂返回;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO185 =!E2115 & (E1534 + E163) & !E15,3:MAKRO
;ENDFOLD
;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO186 =!E2116,3:MAKRO
;FOLD 60: WARTE BIS E2116 ------等待擺臂返回到位;%{SE}%MKUKATPVW%CVW_SPS %VWBOASG %P 2:WARTE BIS E2116,3:WBOASG
;ENDFOLD
;FO;%{SE}%MKUKATPVW%CVW_COM %VCOMMENT %P 2:-- Spueleimer verriegeln - ENDLAGE --,3:VW_COMMENT
;FOLD 62: WARTE ( EIN ) ZEIT 2 [1/10Sek] ;%{SE}%MKUKATPVW %CVW_SPS %VWTASG %P 2:WARTE (EIN ) ZEIT 2 [1/10Sek],3:WTASG
;ENDFOLD
;FOLD 63: SPSMAKRO187 = F355 初始化擺臂控制信號;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO187 =F355,3:MAKRO
;ENDFOLD
2.分析涂膠STEP過程:
擺臂伸出接膠
;%{E}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- InRuhestellung schwenken EIN --, 3: VW_COMMENT
;FOLD F352 = EIN 激活STEP 189步;%{E}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F352 = EIN, 3:BOASG
$FLAG[352] =TRUE
;ENDFOLD
;FOLD F353 = AUS
擺臂撤回膠桶;%{E}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F353 = AUS, 3:BOASG
$FLAG[353] =FALSE
;ENDFOLD
DEFFCTINT MAKRO186(ADV :IN)
;FOLD F352 = AUS ;%{E}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F352 = AUS, 3: BOASG
$FLAG[352] =FALSE
;ENDFOLD
;FOLD F353 = EIN 激活STEP 184步;%{E}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F353 = EIN, 3:BOASG
$FLAG[353] =TRUE
;ENDFOLD
激活STEP的條件:除了MAKRO給入的控制量,還需要F355是非的狀態,以及A4039 程序正處于執行狀態。程序結束A4039會值0,E13 安全門關閉。
;FOLD Schritt 184 = !F352 & F353 &!F355 & (F523 & !F524 + !F523 & F524) & A4039 & E13
--擺臂撤回膠桶;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 184 =!F352 & F353 & !F355 & (F523 & !F524 + !F523 & F524) &A4039 & E13 , 3: ST_CON
IF NOT$FLAG[352] AND $FLAG[353] AND NOT $FLAG[355] AND ($FLAG[523] AND NOT $FLAG[524]OR NOT $FLAG[523] AND $FLAG[524]) AND $OUT[4039] AND $IN[13] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 184
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD Schritt 189 = F352 & !F353 &!F355 & (F523 & !F524 + !F523 & F524) & A4039 & E13
---擺臂伸出接膠
;FOLD SCHRITT 184 ----擺臂撤回膠桶;%{SE}%MKUKATPVW%CVW_SPS %VST_CON %P 2:Schritt 184 = !F352 & F353 & !F355 & (F523& !F524 + !F523 & F524) & A4039 & E13 , 3: ST_CON
IF NOT$FLAG[352] AND $FLAG[353] AND NOT $FLAG[355] AND ($FLAG[523] AND NOT $FLAG[524]OR NOT $FLAG[523] AND $FLAG[524]) AND $OUT[4039] AND $IN[13] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 184
ENDIF
;ENDFOLD
開始-初始化 ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P 1:SCHRITT,2:184, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 184

;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 188 =!E2115 & E2116 & A4039 , 3:ST_CON
IF NOT$IN[2115] AND $IN[2116] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 188
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 185 –檢測先導閥打開;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P 1:SCHRITT, 2:185,3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 185
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 執行程序才能打開先導閥;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F323 = !E2115 沒有伸出到位;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F323 = !E2115,3: BOASG
$FLAG[323]= NOT $IN[2115]
;ENDFOLD
;FOLD F329 = F323 基準位控制不在位故障 -F329 總故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = F323,3: BOASG
$FLAG[329]= $FLAG[323]
;ENDFOLD
;FOLD Schritt 184 = (E26 + E27) & F323& A4039 -有故障,復位返回到184步;%{SE}%MKUKATPVW %CVW_SPS%VST_CON %P 2:Schritt 184 = (E26 + E27) & F323 & A4039 , 3: ST_CON
IF($IN[26] OR $IN[27]) AND $FLAG[323] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 184
ENDIF
;ENDFOLD
;FOLD Schritt 186 = (F523 & !F524& E2113 + !F523 & F524 & !E2114) & A4039
E2113先導閥開 F523帶先導閥=EIN --F524先導閥常閉—先導閥正常執行下一步;%{SE}%MKUKATPVW %CVW_SPS%VST_CON %P 2:Schritt 186 = (F523 & !F524 & E2113 + !F523 & F524& !E2114) & A4039 , 3: ST_CON
IF($FLAG[523] AND NOT $FLAG[524] AND $IN[2113] OR NOT $FLAG[523] AND $FLAG[524]AND NOT $IN[2114]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 186
ENDIF
;ENDFOLD
;ENDFOLD
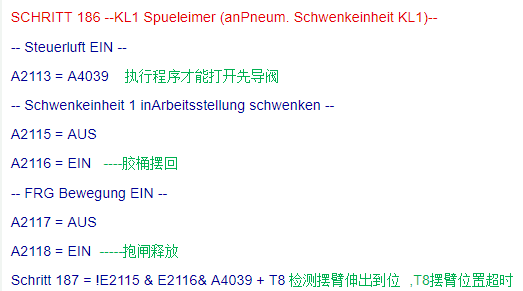
;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P2:Schritt 187 = !E2115 & E2116 & A4039 + T8 , 3: ST_CON
IF NOT$IN[2115] AND $IN[2116] AND $OUT[4039] OR $TIMER_FLAG[8] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 187
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 187 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:187, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 187
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113= A4039, 3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F324 = !E2116 & T8 + F324 -旋轉位置故障F324--;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F324 = !E2116 & T8 + F324, 3: BOASG
$FLAG[324]= NOT $IN[2116] AND $TIMER_FLAG[8] OR $FLAG[324]
;ENDFOLD
;FOLD -- RSK Sammelstoerung -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--RSK Sammelstoerung --, 3: VW_COMMENT
;ENDFOLD
;FOLD F329 = F324 -F329 總故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = F324,3: BOASG
$FLAG[329]= $FLAG[324]
;ENDFOLD
;FOLD A2116 = AUS -關閉膠桶擺回;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2116 = AUS, 3: BOASG
$OUT[2116]= FALSE
;ENDFOLD
;FOLD A2118 = AUS -關閉抱閘釋放 ;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2118 = AUS, 3: BOASG
$OUT[2118]= FALSE
;ENDFOLD
;FOLD Schritt 184 = F324 & (E26 + E27)& A4039 -有旋轉擺臂故障復位后回到184步;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 184 =F324 & (E26 + E27) & A4039 , 3:ST_CON
IF$FLAG[324] AND ($IN[26] OR $IN[27]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 184
ENDIF
;ENDFOLD
;FOLD Schritt 188 = !F324 & (E2118 +F837) & A4039 沒有故障繼續下行;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 188 = !F324 & (E2118 +F837) & A4039 , 3: ST_CON
IF NOT$FLAG[324] AND ($IN[2118] OR $FLAG[837]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 188
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 188 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:188, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 188
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 再次開啟先導閥;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- RSK Sammelstoerung --, 3:VW_COMMENT
;FOLD F329 = T8 -超時故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = T8, 3:BOASG
$FLAG[329]= $TIMER_FLAG[8]
;ENDFOLD
;FOLD;%{SE}%MKUKATPVW%CVW_COM %VCOMMENT %P 2:-- FRG in Endlage halten ein --, 3: VW_COMMENT
;FOLD A2117 = EIN A2117保持釋放到最終位置(泄壓);%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = EIN, 3: BOASG
$OUT[2117]= TRUE
;ENDFOLD
;FOLD A161 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A161 = AUS, 3: BOASG
$OUT[161]= FALSE
;ENDFOLD
;FOLD t8 ( EIN ) = STOP ;%{SE}%MKUKATPVW %CVW_SPS %VTSTOP %P 2:t8 (EIN ) = STOP, 3: TSTOP
VW(#SET_TIME,TRUE,8,1,0)
;ENDFOLD
;FOLD F355 = !E2115 & E2116 –E2116膠桶返回到位,F355發出控制結束;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F355 = !E2115 & E2116, 3: BOASG
$FLAG[355]= NOT $IN[2115] AND $IN[2116]
;ENDFOLD
;FOLD Schritt 1 = !E2117 & (E2118 +F837) & F355 & A4039 -返回第一步-
E2117釋放壓力存在, E2118釋放壓力不存在F837暫時沒有使用
;FOLD SCHRITT 189 --擺臂伸出接膠-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:189, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 189
;FOLD A2113 = A4039 激活先導閥;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F321 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F321 = AUS, 3: BOASG
$FLAG[321]= FALSE
;ENDFOLD
;FOLD F323 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F323 = AUS, 3: BOASG
$FLAG[323]= FALSE
;ENDFOLD
;FOLD F324 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F324 = AUS, 3: BOASG
$FLAG[324]= FALSE
;ENDFOLD
;FOLD F329 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = AUS, 3: BOASG
$FLAG[329]= FALSE
;ENDFOLD
;FOLD A161 = EIN 給PLC 提示開始執行進程程序;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A161 = EIN, 3:BOASG
$OUT[161]= TRUE
;ENDFOLD
;FOLD A2115 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2115 = AUS, 3: BOASG
$OUT[2115]= FALSE
;ENDFOLD
;FOLD A2116 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2116 = AUS, 3: BOASG
$OUT[2116]= FALSE
;ENDFOLD
;FOLD A2117 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = AUS, 3: BOASG
$OUT[2117]= FALSE
;ENDFOLD
;FOLD A2118 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2118 = AUS, 3: BOASG
$OUT[2118]= FALSE
;ENDFOLD
;FOLD -- Ueberwachungszeit Schwenkeinheit1 schwenken -- ;%{SE}%MKUKATPVW%CVW_COM %VCOMMENT %P 2:-- Ueberwachungszeit Schwenkeinheit 1 schwenken --, 3:VW_COMMENT
;ENDFOLD
;FOLD t8 ( EIN ) = -100[1/10Sek] ;%{SE}%MKUKATPVW %CVW_SPS %VTASG %P 2:t8 (EIN ) = -100[1/10Sek], 3: TASG
VW(#SET_TIME,TRUE,8,0,-100)
;ENDFOLD
;FOLD Schritt 190 = !E2115 &A4039 E2115沒有伸出膠桶-下行程序;%{SE}%MKUKATPVW%CVW_SPS %VST_CON %P 2:Schritt 190 = !E2115 & A4039 , 3: ST_CON
IF NOT$IN[2115] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 190
ENDIF
;ENDFOLD
;FOLD Schritt 193 = E2115 & !E2116& A4039 -如果已經伸出到位就去第193步-;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 193 =E2115 & !E2116 & A4039 , 3:ST_CON
IF$IN[2115] AND NOT $IN[2116] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 193
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 190 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:190, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 190
;ENDFOLD
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 激活先導閥;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD -- RSK Fehlerausgabe Schwenkeinheit1 Arbeit. -- ;%{SE}%MKUKATPVW %CVW_COM%VCOMMENT %P 2:-- RSK Fehlerausgabe Schwenkeinheit 1 Arbeit. --, 3: VW_COMMENT
;ENDFOLD
;FOLD F324 = !E2116 沒有在膠桶的返回位報警F324也沒在伸出位;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F324 = !E2116, 3: BOASG
$FLAG[324]= NOT $IN[2116]
;ENDFOLD
;FOLD -- RSK Sammelstoerung -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--RSK Sammelstoerung --, 3: VW_COMMENT
;ENDFOLD
;FOLD F329 = F324 F329 總故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = F324,3: BOASG
$FLAG[329]= $FLAG[324]
;ENDFOLD
;FOLD Schritt 189 = (E26 + E27) & F324& A4039 有故障,復位后再返回到189步;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 189 =(E26 + E27) & F324 & A4039 , 3:ST_CON
IF($IN[26] OR $IN[27]) AND $FLAG[324] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 189
ENDIF
;ENDFOLD
;FOLD Schritt 191 = (F523 & !F524& E2113 + !F523 & F524 & !E2114) & A4039
E2113先導閥開 F523帶先導閥=EIN --F524先導閥常閉—先導閥正常執行下一步;%{SE}%MKUKATPVW %CVW_SPS%VST_CON %P 2:Schritt 191 = (F523 & !F524 & E2113 + !F523 & F524& !E2114) & A4039 , 3: ST_CON
IF($FLAG[523] AND NOT $FLAG[524] AND $IN[2113] OR NOT $FLAG[523] AND $FLAG[524]AND NOT $IN[2114]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 191
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 191 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:191, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 191
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039激活先導閥;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD A2115 = EIN 膠桶擺出接膠位置;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2115 = EIN,3: BOASG
$OUT[2115]= TRUE
;ENDFOLD
;FOLD A2116 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2116 = AUS, 3: BOASG
$OUT[2116]= FALSE
;ENDFOLD
;FOLD -- FRG Bewegung EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--FRG Bewegung EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2117 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = AUS, 3: BOASG
$OUT[2117]= FALSE
;ENDFOLD
;FOLD A2118 = EIN -----抱閘開啟;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2118 = EIN, 3: BOASG
$OUT[2118]= TRUE
;ENDFOLD
;FOLD Schritt 192 = E2115 & !E2116& A4039 + T8
膠桶擺出到位,循序塊下行.T8位置超時;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 192 =E2115 & !E2116 & A4039 + T8 , 3:ST_CON
IF$IN[2115] AND NOT $IN[2116] AND $OUT[4039] OR $TIMER_FLAG[8] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 192
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 192 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:192, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 192
;ENDFOLD
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039激活先導閥;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F323 = !E2115 & T8 + F323 F323沒有撤出到位故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F323 = !E2115& T8 + F323, 3: BOASG
$FLAG[323]= NOT $IN[2115] AND $TIMER_FLAG[8] OR $FLAG[323]
;ENDFOLD
;FOLD F329 = F323 總故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = F323,3: BOASG
$FLAG[329]= $FLAG[323]
;ENDFOLD
;FOLD A2115 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2115 = AUS, 3: BOASG
$OUT[2115]= FALSE
;ENDFOLD
;FOLD;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- FRG Bewegung AUS --, 3:VW_COMMENT
;FOLD A2118 = AUS 關閉抱閘;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2118 = AUS, 3: BOASG
$OUT[2118] = FALSE
;ENDFOLD
;FOLD Schritt 189 = F323 & (E26 + E27)& A4039 -有先導閥故障-復位后返回到189步;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 189 =F323 & (E26 + E27) & A4039 , 3:ST_CON
IF$FLAG[323] AND ($IN[26] OR $IN[27]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 189
ENDIF
;ENDFOLD
;FOLD Schritt 193 = !F323 & (E2118 +F837) & A4039 –沒有故障氣壓釋放-就下行;%{SE}%MKUKATPVW%CVW_SPS %VST_CON %P 2:Schritt 193 = !F323 & (E2118 + F837) &A4039 , 3: ST_CON
IF NOT$FLAG[323] AND ($IN[2118] OR $FLAG[837]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 193
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 193 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:193, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 193
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 -------釋放先導閥;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2113 = A4039, 3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F323 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F323 = AUS, 3: BOASG
$FLAG[323]= FALSE
;ENDFOLD
;FOLD F329 = T8 -----超時總故障;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F329 = T8, 3: BOASG
$FLAG[329]= $TIMER_FLAG[8]
;ENDFOLD
;FOLD A2117 = EIN -----A2117保持釋放到最終位置(泄壓);%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = EIN, 3: BOASG
$OUT[2117]= TRUE
;ENDFOLD
;FOLD Schritt 194 = !E2117 & (E2118 +F837) & A4039 –沒有故障氣壓釋放-就下行;%{SE}%MKUKATPVW %CVW_SPS%VST_CON %P 2:Schritt 194 = !E2117 & (E2118 + F837) & A4039 , 3: ST_CON
IF NOT$IN[2117] AND ($IN[2118] OR $FLAG[837]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 194
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 194 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:194, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 194
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 ---先導閥打開;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2113 = A4039, 3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD -- RSK Sammelstoerung -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--RSK Sammelstoerung --, 3: VW_COMMENT
;ENDFOLD
;FOLD F329 = T8 總故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = T8, 3:BOASG
$FLAG[329]= $TIMER_FLAG[8]
;ENDFOLD
;FOLD A2117 = AUS 關閉A2117保持釋放到最終位置(泄壓);%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = AUS, 3: BOASG
$OUT[2117]= FALSE
;ENDFOLD
;FOLD A161 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A161 = AUS, 3: BOASG
$OUT[161]= FALSE
;ENDFOLD
;FOLD t8 ( EIN ) = STOP ;%{SE}%MKUKATPVW %CVW_SPS %VTSTOP %P 2:t8 (EIN ) = STOP, 3: TSTOP
VW(#SET_TIME,TRUE,8,1,0)
;ENDFOLD
;FOLD F355 = E2115 & !E2116 伸出到位E2115,激活F355標識位用來返回到第1位;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F355 = E2115 & !E2116, 3: BOASG
$FLAG[355]= $IN[2115] AND NOT $IN[2116]
;ENDFOLD
;FOLD Schritt 1 =F355 & A4039 ;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt1 = F355 & A4039 , 3: ST_CON
IF$FLAG[355] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 1
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:195, 3:KL2 Spueleimer (an Pneum. Schwenkeinheit KL2);%{SE}%MKUKATPVW%CVW_SPS %VST_CON %P 2:Schritt 1 = !E2117 & (E2118 + F837) & F355 &A4039 , 3: ST_CON
讀完SPET后 你會發現里面經沒有等 E23和 關閉A23的語句,這說明什么呢? 說明無論是擺臂膠桶,還是焊鉗銑削的STEP,你在開安全門的時候都會中斷它的執行,產生超時,所以這點在編程時一定要注意!
編輯:jq
-
plc
+關注
關注
5016文章
13385瀏覽量
464836 -
程序
+關注
關注
117文章
3795瀏覽量
81305 -
step
+關注
關注
0文章
42瀏覽量
20509
原文標題:關于擺臂涂膠桶STEP控制的一些感悟
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何使用PLC控制myCobot 320機械臂

宜科數智化I/O模塊驅動汽車涂膠設備高效升級
汽車擺臂行業生產設備數據采集及集成

汽車擺臂行業數字化轉型方案及MES系統具體功能介紹
一些常見的動態電路
分享一些常見的電路

咨詢一些關于LED燈具的問題
如何用STM8S001J3設計一個手擺控制LED燈的程序?
細談SolidWorks教育版的一些基礎知識
Tekvpi探頭接口的一些好處是什么?






 工商網監
工商網監
評論