 基于用于檢測障礙物的傳感器的3D打印清潔機器人
基于用于檢測障礙物的傳感器的3D打印清潔機器人
基于fpga的3D打印清潔機器人。該機器人具有多個用于檢測障礙物的傳感器和一個用于清潔地板的吸塵器。此外,該機器人還包含一種導航算法,使其能夠盡可能高效地駛離房間并相應地對障礙物做出反應。
結構: 轉速計數器單元基本上由2個組件組成。 1.磁鐵板由3D打印的PLA組成,每個磁鐵板包含4個釹磁鐵。它們彼此成90度角排列。請注意,磁體的南極朝向傳感器安裝,因為我使用的霍爾傳感器僅檢測到正磁場。 2.霍爾傳感器是指其輸出信號取決于周圍磁場的傳感器。因此,它們檢測磁場,然后更改其輸出的電氣狀態。為了使用FPGA評估輸出信號,必須正確連接霍爾傳感器。
對于機器人,我使用H501型單極霍爾傳感器。在這種情況下,單極意味著傳感器僅檢測磁體的正極。當施加正磁場時,輸出變為高電平狀態;當該磁場不再存在時,輸出降至GND。 另一個重要功能是施密特觸發器。這是一個比較器電路,它將線性輸出信號轉換為方波信號,以便FPGA可以讀取。傳感器具有此電路很重要;否則必須在外部構建。
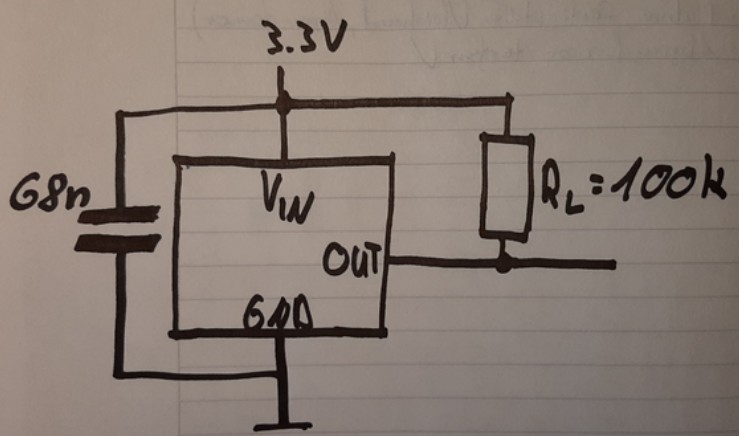
傳感器由機器人的3.3V車載電源供電。小鋁箔塑料電容器用于抑制干擾。輸出信號需要一個值為100k的上拉電阻。
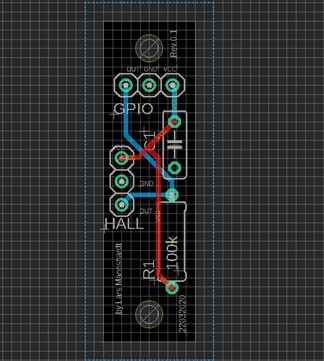
然后,我將此電路轉移到Eagle,并訂購了電路板。PCB可以很好地裝入機器人中為其提供的支架中。
傳感器的行為: 輸出狀態:條件: 0 =》無磁場 1 =》正磁場 注釋顯示傳感器可以檢測到兩種狀態。如果傳感器未檢測到磁場,則輸出端存在低電平。僅當傳感器檢測到磁體的南極時,才發生高電平。當不再存在磁場時,輸出會回落到較低的水平。 在下面的示波器圖中可以很容易地看出這種現象。方波信號顯示了機器人移動時霍爾傳感器的輸出:
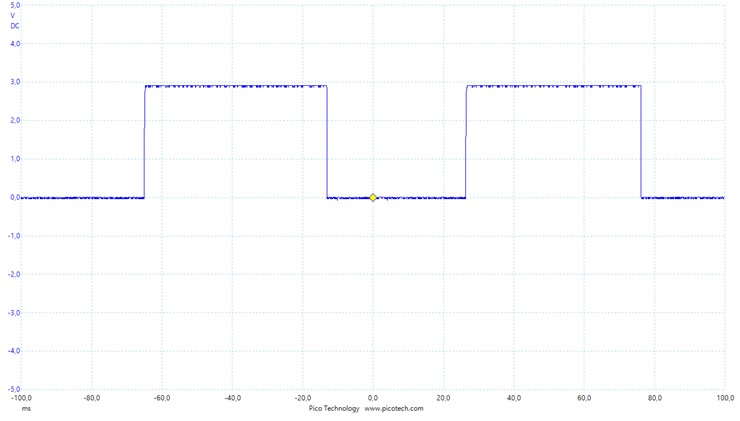
該圖顯示了霍爾傳感器的輸出電壓隨時間(ms)的變化。您會看到由輪的勻速運動產生的周期性方波信號。
責任編輯:pj
-
傳感器
+關注
關注
2557文章
51758瀏覽量
758945 -
機器人
+關注
關注
212文章
28938瀏覽量
209722 -
3D打印
+關注
關注
27文章
3573瀏覽量
110178
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論