") 關(guān)于KUKAC4機(jī)器人測量工具坐標(biāo)的作用淺析
關(guān)于KUKAC4機(jī)器人測量工具坐標(biāo)的作用淺析
在我們執(zhí)行機(jī)器人軌跡是經(jīng)常用到工具坐標(biāo)和BASE基坐標(biāo)。
每一條機(jī)器人軌跡都是需要機(jī)器人的TCP和BASE一起配合實(shí)現(xiàn)的。
BASE坐標(biāo)用來確定機(jī)器人空間上的坐標(biāo)點(diǎn),而TOOL則用來確定機(jī)器人以什么樣的姿態(tài)去這個軌跡點(diǎn)。
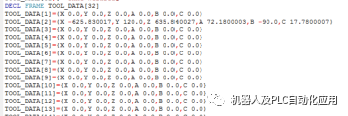
$TOOL=TOOL_DATA[TOOL_NO]
工具坐標(biāo)的特點(diǎn)及用途
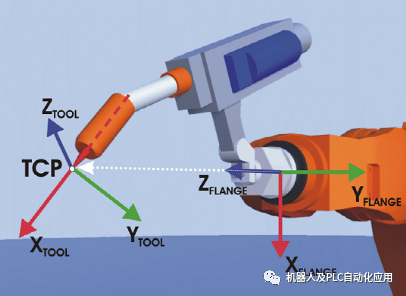
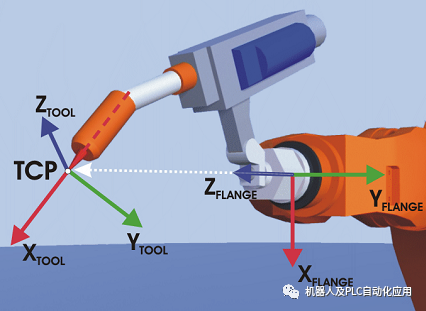
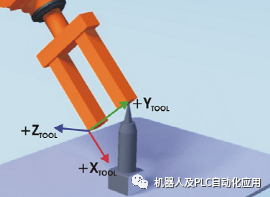
機(jī)器人控制系統(tǒng)通過測量工具 (工具坐標(biāo)系)識別工具頂尖 ( TCP - Tool Center Point,即工具中心點(diǎn) )相對于法蘭中心點(diǎn)位于何處以及其方向如何。


因此,工具測定包括
TCP (坐標(biāo)系原點(diǎn))的測量
找正坐標(biāo)系
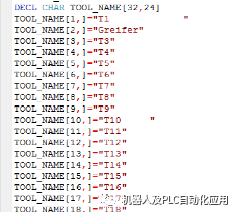
找正最多可儲存 32 個工具坐標(biāo)系。(變量:TOOL_DATA[1…32])。
測量時,工具坐標(biāo)系到法蘭坐標(biāo)系的距離(用 X、Y 和 Z)以及坐標(biāo)系的轉(zhuǎn)角(角度 A、B 和 C)被保存。
如果一個工具已精確測定,則在實(shí)踐中對操作和編程人員有以下優(yōu)點(diǎn):
改善手動運(yùn)行
可圍繞 TCP (例如:工具頂尖)改變方向。
沿工具作業(yè)方向移動
在軌跡運(yùn)動編程 (直線或圓形運(yùn)動)時使用
沿著 TCP 上的軌道保持已編程的運(yùn)行速度。

此外,可沿著軌跡進(jìn)行定義的方向?qū)б?/p>
測量工具
進(jìn)行工具測量時,用戶給安裝在連接法蘭處的工具分配一套笛卡爾坐標(biāo)系。
該工具坐標(biāo)系以用戶設(shè)定的一個點(diǎn)作為其原點(diǎn)。此點(diǎn)稱做 TCP (Tool Center Point,工具中心點(diǎn))。通常,TCP 落在工具的工作點(diǎn)上。

TOOL
是一個可自由定義、用戶定制的坐標(biāo)系。
TOOL 坐標(biāo)系的原點(diǎn)被稱為 TCP - Tool Center Point,即工具中心點(diǎn)。
用于測量工具。
位置在congfig.dat
工具測量的優(yōu)點(diǎn):
工具可以在碰撞方向上直線移動。
工具可以圍繞 TCP 轉(zhuǎn)動,而 TCP 位置不會發(fā)生變化。
在程序運(yùn)行中: 沿著 TCP 上的軌道保持已編程的運(yùn)行速度。
最多可儲存 32 個工具坐標(biāo)系。變量:TOOL_DATA[1…32]。
下列數(shù)據(jù)被儲存:
X、Y、Z:
工具坐標(biāo)系統(tǒng)的原點(diǎn),針對法蘭坐標(biāo)系統(tǒng),工具的TCP點(diǎn)正對法蘭TCP的坐標(biāo)值。
A、B、C:
工具坐標(biāo)系的取向,相對于法蘭坐標(biāo)系, 工具的TCP點(diǎn)正對法蘭TCP的旋轉(zhuǎn)角度,及機(jī)器人所帶工具的姿態(tài)。
正確測量機(jī)器人所帶工具需要進(jìn)行XYZ的測量也要進(jìn)行ABC的測量。下面?zhèn)兘榻B一下。
測量 TCP:XYZ 4 點(diǎn)法
將待測量工具的 TCP 從 4 個不同方向移向一個參照點(diǎn)。參照點(diǎn)可以任意選擇。機(jī)器人控制系統(tǒng)從不同的法蘭位置值中計算出 TCP。
1. 在主菜單中選擇投入運(yùn)行 》 測量 》 工具 》 XYZ 4 點(diǎn)。
2. 為待測量的工具給定一個號碼和一個名稱。用 繼續(xù)鍵確認(rèn)。
3. 用 TCP 移至任意一個參照點(diǎn)。點(diǎn)擊測量。 用繼續(xù)鍵確認(rèn)。

4. 用 TCP 從一個其他方向朝參照點(diǎn)移動。點(diǎn)擊測量。 用繼續(xù)鍵確認(rèn)。
5. 將步驟 4 重復(fù)兩次。

6. 按 保存。數(shù)據(jù)被保存,窗口關(guān)閉。
或按負(fù)載數(shù)據(jù)。數(shù)據(jù)被保存,一個窗口將自動打開,可以在此窗口中輸入負(fù)載數(shù)據(jù)。
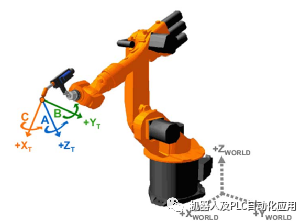
確定取向:ABC 世界坐標(biāo)法
用戶將工具坐標(biāo)系的軸調(diào)整為與世界坐標(biāo)系的軸平行。機(jī)器人控制器從而得知
TOOL 坐標(biāo)系的取向。
此方法有兩種方式:
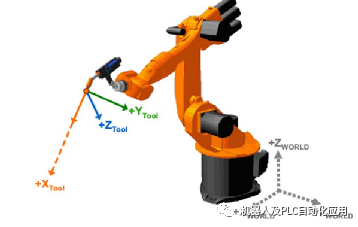
l? 5D: 用戶將工具的碰撞方向告知機(jī)器人控制系統(tǒng)。 碰撞方向默認(rèn)為 X 軸。 其他軸的取向?qū)⒂上到y(tǒng)確定,用戶對此沒有影響力。系統(tǒng)總是為其它軸確定相同的取向。如果之后必須對工具重新進(jìn)行測量,比如在發(fā)生碰撞后,僅需要重新確定碰撞方向。而無需考慮碰撞方向的轉(zhuǎn)度。
l? 6D: 用戶將所有三個軸的取向告知機(jī)器人控制系統(tǒng)。
操作步驟
1. 在主菜單中選擇投入運(yùn)行 》 測量 》 工具 》 ABC 世界。
2. 輸入工具編號。用 繼續(xù)鍵確認(rèn)。
3. 在 5D/6D 欄中選擇一種規(guī)格。用繼續(xù)鍵確認(rèn)。
4. 如果選擇 5D:將 +X工具坐標(biāo)調(diào)整至平行于 -Z世界坐標(biāo)的方向。(+X工具坐標(biāo)= 碰撞方向 )
如果選擇6D:
按如下方法對準(zhǔn)工具坐標(biāo)系的軸。使 +XTOOL與 -ZWORLD平行。(+X工具坐標(biāo) = 碰撞方向 ) +YTOOL與 +YWORLD 平行,+ZTOOL與 +XWORLD平行
5. 點(diǎn)擊 測量。 用繼續(xù)鍵確認(rèn)。
6. 按 保存。數(shù)據(jù)被保存,窗口關(guān)閉。
或按負(fù)載數(shù)據(jù)。數(shù)據(jù)被保存,一個窗口將自動打開,可以在此窗口中輸入負(fù)載數(shù)據(jù)。
確定取向:ABC 2 點(diǎn)法
說明 通過移至 X 軸上一個點(diǎn)和 XY 平面上一個點(diǎn)的方法,機(jī)器人控制器可得知 TOOL 坐標(biāo)系的軸數(shù)據(jù)。
當(dāng)軸方向必須特別精確地確定時,將使用此方法。
操作步驟 1. 在主菜單中選擇投入運(yùn)行 》 測量 》 工具 》 ABC 2 點(diǎn)。
2. 輸入已安裝工具的編號。用 繼續(xù)鍵確認(rèn)。
3. 用 TCP 移至任意一個參照點(diǎn)。點(diǎn)擊測量。 用繼續(xù)鍵確認(rèn)。
4. 移動工具,使參照點(diǎn)在 X 軸上與一個在 X 負(fù)向上的點(diǎn)重合 (即沿著碰撞方向)。點(diǎn)擊測量。 用繼續(xù)鍵確認(rèn)。

5. 移動工具,使參照點(diǎn)在 X、Y 平面上與一個在 Y 正向上的點(diǎn)重合。點(diǎn)擊 測
量。 用繼續(xù)鍵確認(rèn)。
6. 按 保存。數(shù)據(jù)被保存,窗口關(guān)閉。
或按負(fù)載數(shù)據(jù)。數(shù)據(jù)被保存,一個窗口將自動打開,可以在此窗口中輸入
負(fù)載數(shù)據(jù)。
數(shù)字輸入法:
數(shù)據(jù)源:
? CAD
? 外部測量的工具
? 工具生產(chǎn)廠商的說明
操作步驟
1. 在主菜單中選擇投入運(yùn)行 》 測量 》 工具 》 數(shù)字輸入。
2. 為待測量的工具給定一個號碼和一個名稱。用 繼續(xù)鍵確認(rèn)。
3. 輸入數(shù)據(jù)。用 繼續(xù)鍵確認(rèn)。
4. 按 保存。數(shù)據(jù)被保存,窗口關(guān)閉。
下面我們說一下通過WorkVisual 進(jìn)行坐標(biāo)設(shè)定
編輯工具和基坐標(biāo)系
打開工具/基坐標(biāo)管理可對工具和基坐標(biāo)系統(tǒng)進(jìn)行創(chuàng)建、編輯和刪除。另外可用拖放功能將坐標(biāo)系分配給另一個編號。
選擇菜單矊列編輯器-》 工具/基坐標(biāo)管理。

機(jī)器人使用坐標(biāo)總覽:

雙擊可以進(jìn)入單個坐標(biāo)設(shè)置:可以進(jìn)行坐標(biāo)編輯。

導(dǎo)入工具和基坐標(biāo)系;

直接在文件 $config.DAT 中對工具和基坐標(biāo)系作出的更改可以導(dǎo)入項(xiàng)目中。
工具坐標(biāo)的名稱變量:
工具坐標(biāo)的參數(shù)變量:
編輯:lyn
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
208005 -
TCP
+關(guān)注
關(guān)注
8文章
1378瀏覽量
79204 -
Tool
+關(guān)注
關(guān)注
0文章
133瀏覽量
12126
原文標(biāo)題:KUKAC4測量工具坐標(biāo)的作用
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機(jī)器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
三坐標(biāo)測量機(jī)的工作原理 三坐標(biāo)測量機(jī)在質(zhì)量控制中的應(yīng)用
從市場角度對機(jī)器人的基本解讀

鴻蒙機(jī)器人與鴻蒙開發(fā)板聯(lián)動演示
編碼器在機(jī)器人技術(shù)中的應(yīng)用 編碼器在傳感器系統(tǒng)中的作用
焊接機(jī)器人六個軸分別是什么作用

abb機(jī)器人工具坐標(biāo)系問題
ROS讓機(jī)器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
Al大模型機(jī)器人
機(jī)器人視覺的作用是什么
abb機(jī)器人常用指令大全
基于FPGA EtherCAT的六自由度機(jī)器人視覺伺服控制設(shè)計
巡檢機(jī)器人有哪些功能和作用
巡檢機(jī)器人有哪些功能和作用?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論