") 華為首次公開發(fā)布高分辨成像雷達(dá)產(chǎn)品和解決方案
華為首次公開發(fā)布高分辨成像雷達(dá)產(chǎn)品和解決方案
在2021年上海國(guó)際車展前夕,華為首次公開發(fā)布高分辨成像雷達(dá)產(chǎn)品和解決方案。華為融合感知產(chǎn)品部Radar & Camera總經(jīng)理苗立靖就成像雷達(dá)3大核心能力(大陣列高分辨、大視野無(wú)模糊、4D高密點(diǎn)云)和6大價(jià)值場(chǎng)景進(jìn)行了全面的闡述。
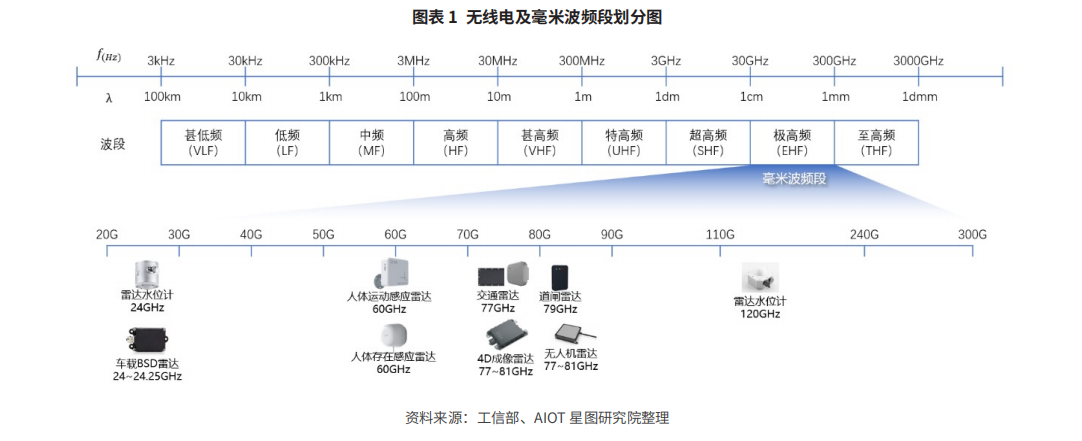
相比激光雷達(dá)和攝像頭,毫米波雷達(dá)具備極佳的測(cè)速能力、極佳的天氣和光線魯棒性(不受光線和雨雪天氣影響),以及非視距被遮擋目標(biāo)的獨(dú)特探測(cè)能力。高分辨4D成像雷達(dá)在繼承這些優(yōu)勢(shì)的同時(shí),大幅提升分辨率,目標(biāo)檢測(cè)的置信度和檢測(cè)范圍(如距離和FOV),同時(shí)進(jìn)化出像激光雷達(dá)一樣的高密度點(diǎn)云,可帶來(lái)豐富的感知增強(qiáng)應(yīng)用,比如環(huán)境刻畫,雷達(dá)構(gòu)圖,定位等,也可以通過多雷達(dá)的點(diǎn)云級(jí)融合,更好實(shí)現(xiàn)車周的360°檢測(cè)。4D成像雷達(dá)必然會(huì)帶來(lái)革命性的變化,成為高階自動(dòng)駕駛下一個(gè)必備武器。
華為毫米波雷達(dá)團(tuán)隊(duì)從2017年開始技術(shù)預(yù)研,用了2年時(shí)間,完成基礎(chǔ)技術(shù)與能力的驗(yàn)證,完成市場(chǎng)分析,確定第一代產(chǎn)品方向;2019年正式啟動(dòng)商用產(chǎn)品開發(fā),包括中距和短距兩個(gè)產(chǎn)品。去年完成第一次夏測(cè)和冬測(cè),預(yù)計(jì)今年實(shí)現(xiàn)首項(xiàng)目SOP交付,2022~2023年將有更多項(xiàng)目量產(chǎn),有希望快速實(shí)現(xiàn)年發(fā)貨超百萬(wàn)。
在第一代雷達(dá)研發(fā)的同時(shí),華為也看到自動(dòng)駕駛或者說(shuō)體驗(yàn)意義上的自動(dòng)駕駛逐步走向量產(chǎn)。它帶來(lái)了傳感器的全新要求,輔助駕駛更多關(guān)注人車檢測(cè),自動(dòng)駕駛要求全目標(biāo)檢測(cè),而且要求高置信度,比如準(zhǔn)確檢測(cè)100米外障礙物。自動(dòng)駕駛對(duì)感知覆蓋的要求也大幅提升,縱向300米車輛,橫向120°,同時(shí)為支持自動(dòng)變道功能,車周360°都需要連續(xù)跟蹤。
自動(dòng)駕駛訴求總結(jié)下來(lái)就是四”全”:全目標(biāo),全覆蓋,全工況和全天候,這就是理想傳感器目標(biāo)。
全目標(biāo):原來(lái)輔助駕駛的檢測(cè)目標(biāo)更多是車和人,自動(dòng)駕駛要求全面檢測(cè)路面或路邊靜止物。
全覆蓋:縱向檢測(cè)需要覆蓋200米以外的車輛,橫向的FOV檢測(cè)也從90°提升到120°。為了實(shí)現(xiàn)安全自動(dòng)變道等高級(jí)功能,車周身的360°目標(biāo)都需要連續(xù)檢測(cè)。
全工況:原來(lái)輔助駕駛更多考慮的是高速場(chǎng)景,當(dāng)前自動(dòng)駕駛由高速開始,逐步考慮城區(qū)擴(kuò)展,同時(shí)一些極限、特殊場(chǎng)景也需成為感知能力范圍,如擁塞、事故。
全天候:為了保證體驗(yàn)連續(xù)性,需要考慮不同天氣和不同光線條件等復(fù)雜環(huán)境下,傳感器仍具備可靠的感知能力。
面向這些訴求,攝像頭率先演進(jìn),2MP升級(jí)到8MP,搭載數(shù)量每車5個(gè)到10個(gè)以上,高線數(shù)激光雷達(dá)也陸續(xù)成為主流量產(chǎn)車型的必備選擇。剩下一個(gè)命題是毫米波將如何演進(jìn)?
華為認(rèn)為毫米波的下一步演進(jìn)就是高分辨4D成像雷達(dá),4D是指檢測(cè)目標(biāo)的4個(gè)維度,包括它的速度、距離、水平角度和垂直角度,傳統(tǒng)雷達(dá)水平分辨能力不足,不支持垂直分辨,導(dǎo)致看不清,看不準(zhǔn)。近年來(lái)自動(dòng)駕駛事故中,感知不足是重要原因之一,比如沒有有效識(shí)別靜止車輛或事故車輛,隔離樁或護(hù)欄判斷不準(zhǔn)導(dǎo)致嚴(yán)重事故。
4D成像雷達(dá)大幅提升水平和垂直的角度測(cè)量能力,滿足全目標(biāo),全覆蓋和多工況的感知要求,逐步接近理想傳感器目標(biāo),將和攝像頭、激光雷達(dá)形成有效融合和冗余,打造滿足自動(dòng)駕駛要求的感知鐵三角。
華為正式發(fā)布的下一代高分辨4D成像雷達(dá),在3個(gè)方面實(shí)現(xiàn)能力的斷代性提升:
第一個(gè)是大陣列高分辨。提高角度分辨,單純依靠軟件算法雖有部分優(yōu)化方案,但華為認(rèn)為更普適、更可靠的方式是增加天線陣列,加大天線口徑,實(shí)現(xiàn)能力的跨越式提升。華為高分辨4D成像雷達(dá)采用12個(gè)發(fā)射通道,24接收通道,比常規(guī)毫米波3發(fā)4收的天線配置,整整提升了24倍,比業(yè)界典型成像雷達(dá)多50%接收通道,這是短期可量產(chǎn)的最大天線配置成像雷達(dá)。通過這樣的超強(qiáng)硬件配置,水平角分辨率將從傳統(tǒng)的3~4°,提升到1°,垂直高度分辨也從無(wú)到有,達(dá)到2°,這是天線能力實(shí)口徑,軟件優(yōu)化還有進(jìn)步空間。更重要是角測(cè)量精度也將從0.2°度提升到0.1°,對(duì)城區(qū)擁堵等密集場(chǎng)景非常有意義。
第二是大視場(chǎng)無(wú)模糊。水平視場(chǎng)從90°提升到120°,垂直視場(chǎng)從18°提升到30°,縱向探測(cè)距離從200米提升到300米以上。覆蓋范圍(距離+FOV)的擴(kuò)展,一方面由自動(dòng)駕駛功能驅(qū)動(dòng),另一方面來(lái)自多傳感器融合冗余需求。例如,8MP攝像頭采用30°+120°兩個(gè)模組,實(shí)現(xiàn)遠(yuǎn)距30°內(nèi),大于500米車輛感知,近距支持120°內(nèi)的200米覆蓋。
通過大陣列設(shè)計(jì),一個(gè)4D成像雷達(dá)可支持遠(yuǎn)近兩種波形,兼顧遠(yuǎn)距和近距廣角覆蓋,長(zhǎng)波形支持18°內(nèi)超過300米覆蓋,短波形實(shí)現(xiàn)120°內(nèi)的150米覆蓋,完全滿足十字路口等城區(qū)場(chǎng)景要求,將對(duì)齊攝像頭和激光雷達(dá)目標(biāo);
還要特別強(qiáng)調(diào)的是無(wú)模糊能力,傳統(tǒng)雷達(dá)角度測(cè)量有多義性,就是一個(gè)目標(biāo)可能計(jì)算出多個(gè)角度方向,需要進(jìn)一步算法消除。華為4D成像雷達(dá)通過天線排布和信號(hào)處理優(yōu)化,實(shí)現(xiàn)角度無(wú)模糊,準(zhǔn)確識(shí)別目標(biāo),在人車混流、十字路口的多目標(biāo)場(chǎng)景非常有用,可以避免角度模糊結(jié)果和真實(shí)反射混到一起,減少虛警,形成高置信度點(diǎn)云,并簡(jiǎn)化后端點(diǎn)云跟蹤算法,避免多幀消除的處理時(shí)延。
第三是4D高密點(diǎn)云。作為綜合能力提升的結(jié)果,毫米波雷達(dá)也可以像激光雷達(dá)一樣支持高密度點(diǎn)云。成像雷達(dá)的4D點(diǎn)云,也就是速度,距離,水平角度和垂直高度,相比激光雷達(dá)點(diǎn)云,多一個(gè)速度維度,可以有更多的維度對(duì)目標(biāo)物體進(jìn)行詮釋;相比傳統(tǒng)雷達(dá),4D點(diǎn)云帶來(lái)豐富的感知增強(qiáng)應(yīng)用,比如環(huán)境刻畫,雷達(dá)構(gòu)圖,定位等,也可以通過多雷達(dá)的點(diǎn)云級(jí)融合,更好實(shí)現(xiàn)車周的360°檢測(cè),這將會(huì)帶來(lái)革命性的變化。比如利用MDC的大算力資源,引入AI方案增強(qiáng)目標(biāo)跟蹤;也可以基于點(diǎn)云,實(shí)現(xiàn)分米級(jí)精度的構(gòu)圖與定位。需要補(bǔ)充的是,因?yàn)楹撩撞ǖ奶鞖夂凸饩€魯棒性非常好,基于毫米波的構(gòu)圖與定位將有非常大的應(yīng)用空間。
另外,點(diǎn)云處理意味需要點(diǎn)云采集及域控軟件配套,華為在這方面會(huì)有非常強(qiáng)的合作開發(fā)能力。華為4D成像雷達(dá)的開發(fā)團(tuán)隊(duì)主體在中國(guó),數(shù)據(jù)分析和采集,中國(guó)場(chǎng)景會(huì)優(yōu)化的更充分,在與OEM域控軟件對(duì)接中,實(shí)現(xiàn)高效聯(lián)合開發(fā)。
對(duì)于4D成像雷達(dá)的組網(wǎng),華為靈活支持3種架構(gòu):對(duì)接小算力域控,雷達(dá)僅輸出目標(biāo);對(duì)接大算力域控,所有跟蹤處理在域控完成,僅輸出4D點(diǎn)云;或點(diǎn)云+目標(biāo)混合輸出模式。
在用戶價(jià)值上,華為提煉總結(jié)了4D成像雷達(dá)的6大場(chǎng)景價(jià)值
1.高速巡航場(chǎng)景:要保障高速巡航的行車體驗(yàn),主要指標(biāo)是看的更遠(yuǎn)更清,避免急剎。典型場(chǎng)景是前方擁塞時(shí),130kph下舒適性剎停,需要判斷220米外前車是處于本車道還是鄰車道。
4D成像雷達(dá)支持1°水平分辨,300米的車輛檢測(cè)跟蹤,這樣即便220米外兩輛車完全同速同距,位于相鄰車道,也可以通過角度分辨出來(lái)
2.安全避障:無(wú)論自動(dòng)駕駛還是輔助駕駛,安全仍是首要問題,對(duì)傳感器最迫切訴求是靜止障礙物檢測(cè),這是傳統(tǒng)毫米波的短板。4D成像雷達(dá)點(diǎn)云密度提升10倍,大幅提升靜止目標(biāo)檢測(cè)置信度,小障礙物檢測(cè)也有很好表現(xiàn)。例如錐桶探測(cè)距離達(dá)到110米,也可實(shí)現(xiàn)護(hù)欄靜止車分辨。
支持靜止物檢測(cè),就必須有效區(qū)別地面靜止物或懸空物,比如不能把龍門架上報(bào)為障礙物。成像雷達(dá)通過2°垂直分辨,極限場(chǎng)景可通過高度測(cè)量,分辨220米外龍門架和下方靜止車,保證不會(huì)被誤判障礙物。
3.城區(qū)巡航:高階自動(dòng)駕駛中,城區(qū)場(chǎng)景是最難的,主要挑戰(zhàn)是大量橫向運(yùn)動(dòng)檢測(cè),和多目標(biāo)的復(fù)雜工況,如人車混行場(chǎng)景(近端行人,車輛L型);人/自行車等VRU和公交的大小目標(biāo)并行場(chǎng)景;被遮擋場(chǎng)景,施工區(qū)護(hù)欄變窄場(chǎng)景等,成像雷達(dá)大視場(chǎng)無(wú)模糊能力可以很好地匹配城區(qū)要求。
此外測(cè)角精度和高動(dòng)態(tài)能力也非常重要。測(cè)角精度從0.2°提升到0.1°,50米橫向測(cè)量誤差將小于10cm,100米測(cè)量誤差小于20cm,這對(duì)城區(qū)場(chǎng)景,狹窄區(qū)域可通行判斷非常有用。同時(shí),成像雷達(dá)具備更高動(dòng)態(tài)范圍,對(duì)公交車和行人并排,大小目標(biāo)場(chǎng)景也可準(zhǔn)確檢測(cè)。
4.非視距前前車檢測(cè):被遮擋或部分被遮擋目標(biāo)感知是毫米波獨(dú)特能力,就是電磁波信號(hào)從車輛底盤下方傳播,實(shí)現(xiàn)非視距目標(biāo)探測(cè)。相對(duì)傳統(tǒng)雷達(dá),因?yàn)?D成像雷達(dá)的多徑處理能力更強(qiáng),典型場(chǎng)景前前車的探測(cè)能力將提升100%以上。
4D成像雷達(dá)可以看到前車,前前車,和前前前車,甚至可以看到前前車的大致底盤輪廓,通過對(duì)前前車的感知,比如有急減速,可提前預(yù)判前車動(dòng)作,減少連環(huán)追尾風(fēng)險(xiǎn)。
5.環(huán)境刻畫:4D點(diǎn)云有很多應(yīng)用,環(huán)境刻畫是最典型的一個(gè)。通過150米以上的護(hù)欄探測(cè),有效確定道路邊界;通過高精度測(cè)高,準(zhǔn)確判斷地面、地上、空中等不同高度目標(biāo),勾勒3D道路拓?fù)浣Y(jié)構(gòu);最后通過人車障礙物等點(diǎn)云處理,可以生成10cm精度的可通行區(qū)域,形成完全匹敵激光雷達(dá)和攝像頭的環(huán)境刻畫。
6.360°全方位檢測(cè):最后一點(diǎn)是也是4D點(diǎn)云應(yīng)用,就是全車多雷達(dá)的點(diǎn)云集中在域控上處理,實(shí)現(xiàn)從“目標(biāo)級(jí)融合”到“檢測(cè)級(jí)融合”,融合后點(diǎn)云對(duì)360°車輛連續(xù)跟蹤非常有用,比如后向超車場(chǎng)景,從迫近到超越,融合點(diǎn)云整個(gè)過程是連續(xù)的,確保跟蹤過程平穩(wěn),最大避免跟蹤ID跳變。這樣Cut-in檢測(cè)或意圖判斷也可以提前進(jìn)行,有助于解決近距Cut-in問題。
綜上所述,華為高分辨4D成像雷達(dá)總結(jié)為3大能力,6大價(jià)值:
3大能力:4倍分辨率提升,大視場(chǎng)無(wú)模糊,4D高密點(diǎn)云。
6大價(jià)值:高速巡航超遠(yuǎn)感知,高速巡航避障,城區(qū)多目標(biāo)復(fù)雜場(chǎng)景可用,非視距感知,環(huán)境刻畫,多雷達(dá)點(diǎn)云360°融合。
正是有著如此之多的獨(dú)特優(yōu)勢(shì)和需求驅(qū)動(dòng),華為相信,成像雷達(dá)必然會(huì)成為下一個(gè)高階自動(dòng)駕駛的必備武器,與高線數(shù)激光雷達(dá)、高清攝像頭一起,賦能高階自動(dòng)駕駛。
責(zé)任編輯:lq
-
華為
+關(guān)注
關(guān)注
216文章
34530瀏覽量
252603 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4024瀏覽量
190245 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13923瀏覽量
166820
原文標(biāo)題:華為高分辨成像雷達(dá)首發(fā)!賦能高階自動(dòng)駕駛
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
加特蘭集成Cadence DSP,升級(jí)汽車成像雷達(dá)解決方案
諾丁漢特倫特大學(xué)研發(fā)全紅外波段高分辨率成像技術(shù)
加特蘭與Cadence合作開發(fā)下一代汽車成像雷達(dá)解決方案
NE5532放大器用在倒車雷達(dá)產(chǎn)品上為什么在常溫下沒辦法正常放大,要高溫下才能正常工作?
物聯(lián)網(wǎng)中的高分辨率精確距離測(cè)量方案_毫米波雷達(dá)
鼎陽(yáng)科技|高分辨率產(chǎn)品增長(zhǎng)39.42%,引領(lǐng)高端市場(chǎng)新浪潮!

Teledyne DALSA發(fā)布AxCIS?系列彩色版高速高分辨率線陣掃描成像模塊
商用激光雷達(dá)產(chǎn)品InnovizOne有什么獨(dú)特之處
華域汽車電子分公司攜手Uhnder開發(fā)新一代4D數(shù)字成像雷達(dá)
森思泰克發(fā)布兩款全新激光雷達(dá)產(chǎn)品
廣達(dá)與Obsidian Sensors合作制造面向汽車應(yīng)用的高分辨率熱成像相機(jī)

數(shù)字成像雷達(dá)芯片技術(shù)頭部企業(yè)Uhnder宣布推出全新成像雷達(dá)解決方案S81
機(jī)載單光子激光雷達(dá)系統(tǒng)用于實(shí)現(xiàn)高分辨率3D成像

華為首次超越蘋果成為國(guó)內(nèi)平板電腦市場(chǎng)出貨量第一

詳解蔡司原位液體電化學(xué)顯微解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論