 基于MSP430F149單片機和短距離無線接入技術實現車輛傳感器的設計
基于MSP430F149單片機和短距離無線接入技術實現車輛傳感器的設計
作者:丁茹;林凌;韓曉斌;李剛
一。 引言
目前,高速公路和城市交通問題是世界各國的普遍性問題,它直接影響經濟的發展和人們的生活。智能交通系統(ITS)是解決日益嚴重的高速公路和城市交通問題的有效途徑,車輛檢測器則是ITS中最重要的交通數據采集設備之一。感應線圈式車輛檢測傳感器因其具有穩定性好,性價比高等優點,故在工程上應用最廣 。但現有的感應線圈式車輛傳感器還存在一些缺點,如感應線圈的體積太大(1m×2m),需要安裝饋線,安裝工程量大,安裝時需要阻斷交通,感應線圈極易損壞,損壞后難于修復,使用壽命短等等。另外,為了避免漏檢車輛,需要在路口安裝多臺車輛檢測器,將檢測數據通過電纜向上位機傳輸,并實現網絡傳輸。為了解決這些問題,早在上世紀70年代末,J.F. Scarzello就提出了一種利用射頻方式通信的磁性檢測器,以便省掉饋線的安裝,降低安裝工程量。本文根據國內外車輛檢測器技術的發展,采用微型線圈,并將單片機控制技術和新型的短距離無線接入技術ZigBee引入車輛傳感器的設計中,不僅可以省去通信電纜的安裝,降低安裝工程量,還可以安全可靠地實現數據傳輸和網絡互聯,從而開發出適用性更強的車輛傳感器。
二。硬件設計
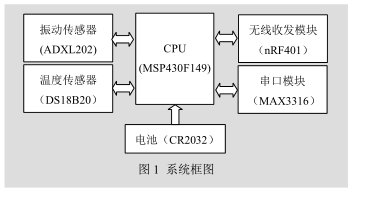
感應線圈式車輛檢測傳感器由探測模塊、電源模塊、控制模塊和通信模塊組成,其原理框圖如圖1所示。探測模塊是一個由探測線圈和反相器構成振蕩器的選頻模塊;控制模塊采用具有智能控制功能的低功耗單片機MSP430F149,用于測量振蕩器頻率的變化來判斷是否有車輛通過,并管理和協調系統各部分的工作;電源模塊采用可充電電池為車輛傳感器供電; 發射模塊用于與外界通信,發送檢測到的相關信息。下面僅對主要電路的設計進行說明。
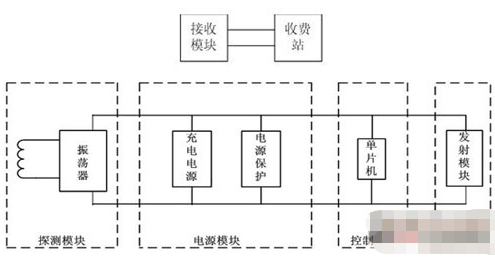
圖1 感應線圈式車輛檢測器原理框圖
1 探測模塊的設計
探測模塊是一個由探測線圈和反相器構成振蕩器的選頻模塊。由于傳感器的振蕩頻率包含了被測信息,保持短期頻率的穩定性十分關鍵;而且好的振蕩波形有利于單片機測頻,減少誤判和漏判的發生。因此,從工作頻段、頻率穩定性和振蕩波形三方面考慮,本文采用了電容三點式振蕩電路[5~6]。另外,為了便于單片機測量,設計中加入了整形電路,其功能是將振蕩電路產生的正弦信號整形成同頻率的方波信號。具體電路如圖2所示。
在設計中我們盡可能地減小了探測線圈的體積并且在線圈中加入了鐵氧體磁芯。線圈體積的減小,大大降低了安裝的工程量,同時使得線圈不容易受到損壞且容易維護;加入鐵氧體磁芯,能夠增加振蕩器頻率的穩定性和檢測的靈敏度。
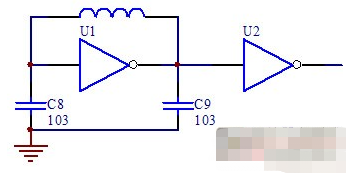
圖2 檢測電路
2 電源模塊設計
電源模塊采用可充電電池為車輛傳感器供電。電源模塊通過電源管理芯片和控制模塊進行管理。當電源管理芯片檢測到電源的電壓低落時,發射模塊發射需要充電的信號,通知工作人員對車輛傳感器的電池進行充電。當電池電量充滿時,發射模塊發射停止充電的信號,通知工作人員停止對車輛傳感器的電池充電。電源保護電路對電源進行過度充電保護、過電流/短路保護和過放電保護。充電方案設計如圖3所示。
圖3 充電方案
另外,充電控制模塊選用了TI公司的bq2000芯片核心。該芯片可用于鎘鎳、鎳氫、鋰離子電池的可編程快充電,具有檢測電池類型并進行相應優化充電和中止充電的功能,可避免欠充、過充對電池的損壞,從而實現安全可靠的快充控制。
3 射頻模塊設計
發射模塊用于與外界通信,發送檢測到的相關信息。接收模塊將接收到的信息上傳至收費站或控制中心。本設計中我們選用了Chipcon公司的基于ZigBee 協議的CC2420EM射頻模塊。ZigBee是一種新型的短距離無線接入技術,與藍牙相比,它具有低速率、低成本、低功耗、組網方便等優點。 CC2420是Chipcon公司推出的首款基于ZigBee技術的射頻收發器。它只需極少外部元器件,性能穩定且功耗極低,可確保短距離通信的有效性和可靠性。利用此芯片開發的無線通信設備支持數據傳輸率高達250kbps,可以實現多點對多點的快速組網。CC2420EM模塊集成了CC2420 及其所需的外圍電路。MSP430F149通過高速SPI總線配置和控制CC2420[10],其接口電路如圖4所示。
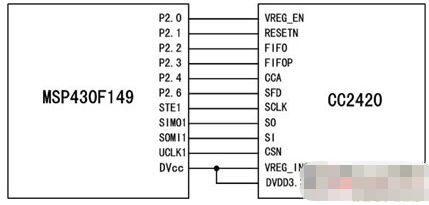
圖4 MSP430F149與CC2420的接口電路
MSP430F149 通過4線SPI總線(STE1、SIMO1、SOMI1、UCLK1)控制和設置芯片的工作模式,并實現讀/寫緩存數據,讀/寫狀態寄存器等。通過控制 FIFO和FIFOP引腳接口的狀態可設置發射/接收緩存器,FIFOP引腳必須連接到單片機的中斷引腳。通過CCA引腳狀態可以得到空閑信道估計。通過 SFD引腳狀態可以得到發射幀和接收幀的定時信息從而判斷系統的工作狀態,SFD引腳應該接到單片機的時鐘捕捉引腳。
三。軟件設計
根據車輛檢測傳感器的功能要求,結合硬件電路結構,系統的軟件主要實現以下功能:
(1)測量頻率的變化量,確定測量頻率變化量的方案以保證系統的靈敏度。由于系統頻率的本身的漂移,需對無車時的頻率值進行校正,以消除系統誤差;
(2)配置射頻模塊,設計數據幀以及車輛傳感器組網設計。
軟件總體設計流程圖如圖5所示。整個程序分為系統初始化程序、頻率測量程序、通訊程序。
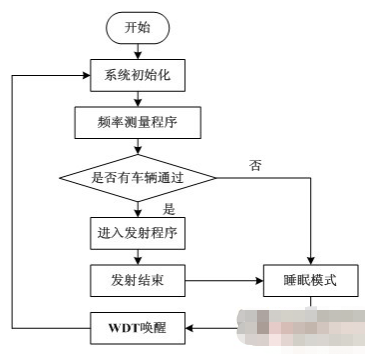
圖5 主程序流程
系統初始化程序主要包括MSP430F149時鐘的設置、各個通訊端口的設置,定時器的設置等。當系統設置好后,進入頻率測量程序。頻率測量程序主要包括頻率變化量的測量、閾值的校準、抗干擾的處理。若沒有檢測到車輛,則系統進入低功耗模式。如果所測得頻率值大于閾值,則進入發射程序,發射檢測到車輛的信號。發射結束后系統進入低功耗模式,此時啟動看門狗定時器(WDT),當看門狗定時器溢出時喚醒系統,進行下一次測量。
四。結束語
本文作者創新點:一是將新型短距離無線通信技術ZigBee運用于設計中,從而省掉了饋線,使傳感器的安裝快捷、方便,并運用新型單片機控制技術,提高傳感器的靈敏度和可靠性,降低誤檢率,同時使傳感器具有智能,可以顯著地降低功耗和實現自檢、功耗管理;二是采用新型的電源控制和充電控制芯片構成電源模塊,大幅度延長傳感器的使用壽命和簡化管理。該傳感器體積小,安裝方便,對路面破壞小,易于維護,不但可以用于道路交通車輛檢測,還可以用于智能停車場車位檢測,有著廣泛的應用前景。
責任編輯:gt
-
傳感器
+關注
關注
2552文章
51382瀏覽量
755765 -
單片機
+關注
關注
6042文章
44617瀏覽量
637520 -
ZigBee
+關注
關注
158文章
2271瀏覽量
243159
發布評論請先 登錄
相關推薦
怎么設計一種基于MSP430F149的無線傳感器網絡系統?
基于MSP430F149單片機的光電編碼器位置檢測系統設計

MSP430F149的無線傳感器網絡節點設計詳析

MSP430F149單片機-IAP升級

基于雙MSP430F149單片機的車輛監控系統車載移動終端設計





 工商網監
工商網監
評論