") SIFT算法實(shí)現(xiàn)細(xì)節(jié)
SIFT算法實(shí)現(xiàn)細(xì)節(jié)
一. SIFT簡介
1.1 算法提出的背景:
成像匹配的核心問題是將同一目標(biāo)在不同時(shí)間、不同分辨率、不同光照、不同位姿情況下所成的像相對應(yīng)。傳統(tǒng)的匹配算法往往是直接提取角點(diǎn)或邊緣,對環(huán)境的適應(yīng)能力較差,急需提出一種魯棒性強(qiáng)、能夠適應(yīng)不同光照、不同位姿等情況下能夠有效識別目標(biāo)的方法。1999年British Columbia大學(xué)大衛(wèi).勞伊( David G.Lowe)教授總結(jié)了現(xiàn)有的基于不變量技術(shù)的特征檢測方法,并正式提出了一種基于尺度空間的、對圖像縮放、旋轉(zhuǎn)甚至仿射變換保持不變性的圖像局部特征描述算子-SIFT(尺度不變特征變換),這種算法在2004年被加以完善。
1.2 算法思想:
將一幅圖像映射(變換)為一個(gè)局部特征向量集;特征向量具有平移、縮放、旋轉(zhuǎn)不變性,同時(shí)對光照變化、仿射及投影變換也有一定不變性。
算法實(shí)現(xiàn)步驟簡述:
SIFT算法的實(shí)質(zhì)可以歸為在不同尺度空間上查找特征點(diǎn)(關(guān)鍵點(diǎn))的問題。
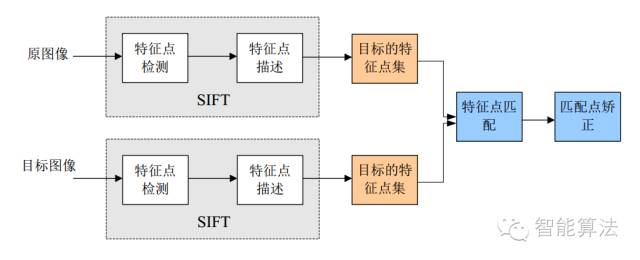
1.3 SIFT算法實(shí)現(xiàn)物體識別主要有三大工序:
1、提取關(guān)鍵點(diǎn);
2、對關(guān)鍵點(diǎn)附加詳細(xì)的信息(局部特征)也就是所謂的描述器;
3、通過兩方特征點(diǎn)(附帶上特征向量的關(guān)鍵點(diǎn))的兩兩比較找出相互匹配的若干對特征點(diǎn),也就建立了景物間的對應(yīng)關(guān)系。
二. SIFT算法實(shí)現(xiàn)細(xì)節(jié)
2.1. 構(gòu)建尺度空間
尺度空間理論基礎(chǔ):
這是一個(gè)初始化操作,尺度空間理論目的是模擬圖像數(shù)據(jù)的多尺度特征。高斯核是唯一可以產(chǎn)生多尺度空間的核,一個(gè)圖像的尺度空間, L( x,y,σ) ,定義為原始圖像I(x,y)與一個(gè)可變尺度的2維高斯函數(shù)G(x,y,σ) 卷積運(yùn)算。尺度是自然存在的,不是人為創(chuàng)造的!高斯卷積只是表現(xiàn)尺度空間的一種形式…


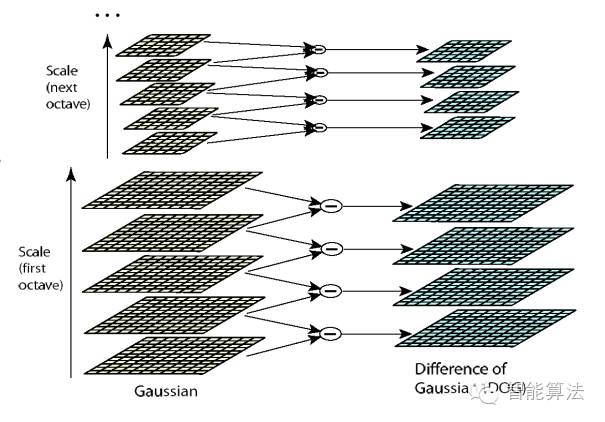
其中 G(x,y,σ) 是尺度可變高斯函數(shù)(x,y)是空間坐標(biāo),是尺度坐標(biāo)。σ大小決定圖像的平滑程度,大尺度對應(yīng)圖像的概貌特征,小尺度對應(yīng)圖像的細(xì)節(jié)特征。大的σ值對應(yīng)粗糙尺度(低分辨率),反之,對應(yīng)精細(xì)尺度(高分辨率)。為了有效的在尺度空間檢測到穩(wěn)定的關(guān)鍵點(diǎn),提出了高斯差分尺度空間(DOG scale-space)。利用不同尺度的高斯差分核與圖像卷積生成。

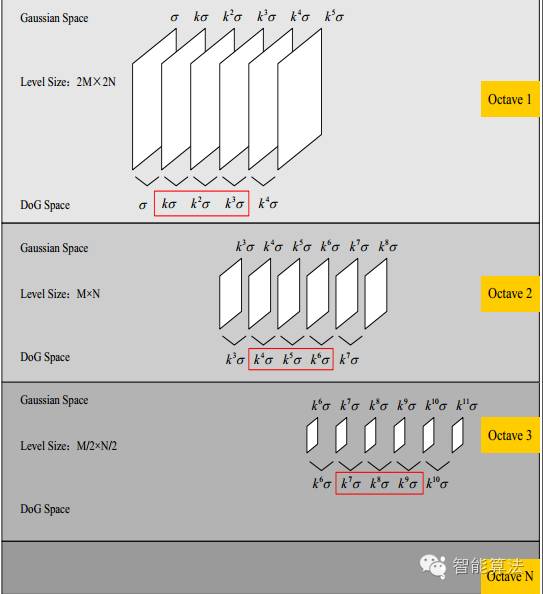
下圖所示不同σ下圖像尺度空間:
關(guān)于尺度空間的理解說明:
2kσ中的2是必須的,尺度空間是連續(xù)的。在 Lowe的論文中 ,將第0層的初始尺度定為1.6(最模糊),圖片的初始尺度定為0.5(最清晰). 在檢測極值點(diǎn)前對原始圖像的高斯平滑以致圖像丟失高頻信息,所以 Lowe 建議在建立尺度空間前首先對原始圖像長寬擴(kuò)展一倍,以保留原始圖像信息,增加特征點(diǎn)數(shù)量。尺度越大圖像越模糊。
圖像金字塔的建立:
對于一幅圖像I,建立其在不同尺度(scale)的圖像,也成為子八度(octave),這是為了scale-invariant,也就是在任何尺度都能夠有對應(yīng)的特征點(diǎn),第一個(gè)子八度的scale為原圖大小,后面每個(gè)octave為上一個(gè)octave降采樣的結(jié)果,即原圖的1/4(長寬分別減半),構(gòu)成下一個(gè)子八度(高一層金字塔)。
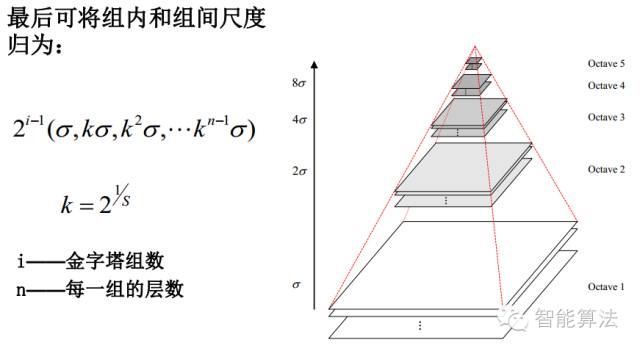
由圖片size決定建幾個(gè)塔,每塔幾層圖像(S一般為3-5層)。0塔的第0層是原始圖像(或你double后的圖像),往上每一層是對其下一層進(jìn)行Laplacian變換(高斯卷積,其中σ值漸大,例如可以是σ, k*σ, k*k*σ…),直觀上看來越往上圖片越模糊。塔間的圖片是降采樣關(guān)系,例如1塔的第0層可以由0塔的第3層down sample得到,然后進(jìn)行與0塔類似的高斯卷積操作。
2.2.關(guān)鍵點(diǎn)檢測
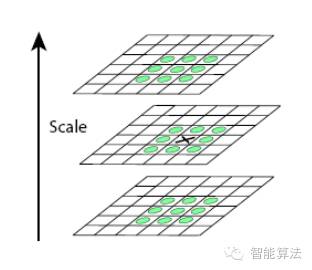
為了尋找尺度空間的極值點(diǎn),每一個(gè)采樣點(diǎn)要和它所有的相鄰點(diǎn)比較,看其是否比它的圖像域和尺度域的相鄰點(diǎn)大或者小。如圖所示,中間的檢測點(diǎn)和它同尺度的8個(gè)相鄰點(diǎn)和上下相鄰尺度對應(yīng)的9×2個(gè)點(diǎn)共26個(gè)點(diǎn)比較,以確保在尺度空間和二維圖像空間都檢測到極值點(diǎn)。一個(gè)點(diǎn)如果在DOG尺度空間本層以及上下兩層的26個(gè)領(lǐng)域中是最大或最小值時(shí),就認(rèn)為該點(diǎn)是圖像在該尺度下的一個(gè)特征點(diǎn),如圖所示。
同一組中的相鄰尺度(由于k的取值關(guān)系,肯定是上下層)之間進(jìn)行尋找,在極值比較的過程中,每一組圖像的首末兩層是無法進(jìn)行極值比較的,為了滿足尺度變化的連續(xù)性,我們在每一組圖像的頂層繼續(xù)用高斯模糊生成了3幅圖像,高斯金字塔有每組S+3層圖像。DOG金字塔每組有S+2層圖像。下圖中s=3
這里解釋下尺度變化的連續(xù)性:
假設(shè)s=3,也就是每個(gè)塔里有3層,則k=21/s=21/3,那么按照上圖可得Gauss Space和DoG space 分別有3個(gè)(s個(gè))和2個(gè)(s-1個(gè))分量,在DoG space中,1st-octave兩項(xiàng)分別是σ,kσ; 2nd-octave兩項(xiàng)分別是2σ,2kσ;由于無法比較極值,我們必須在高斯空間繼續(xù)添加高斯模糊項(xiàng),使得形成σ,kσ,k2σ,k3σ,k4σ這樣就可以選擇DoG space中的中間三項(xiàng)kσ,k2σ,k3σ(只有左右都有才能有極值),那么下一octave中(由上一層降采樣獲得)所得三項(xiàng)即為2kσ,2k2σ,2k3σ,其首項(xiàng)2kσ=24/3。剛好與上一octave末項(xiàng)k3σ=23/3尺度變化連續(xù)起來,所以每次要在Gaussian space添加3項(xiàng),每組(塔)共S+3層圖像,相應(yīng)的DoG金字塔有S+2層圖像。
2.3.消除錯(cuò)配點(diǎn)
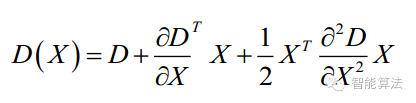
由于DoG值對噪聲和邊緣較敏感,因此,在上面DoG尺度空間中檢測到局部極值點(diǎn)還要經(jīng)過進(jìn)一步的檢驗(yàn)才能精確定位為特征點(diǎn)。為了提高關(guān)鍵點(diǎn)的穩(wěn)定性,需要對尺度空間DoG函數(shù)進(jìn)行曲線擬合。利用DoG函數(shù)在尺度空間的Taylor展開式:
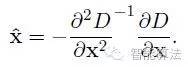
對上式求導(dǎo),并令其為0,得到精確的位置, 得
在已經(jīng)檢測到的特征點(diǎn)中,要去掉低對比度的特征點(diǎn)和不穩(wěn)定的邊緣響應(yīng)點(diǎn)。去除低對比度的點(diǎn):把上式代入其中,即在DoG Space的極值點(diǎn)處D(x)取值,只取前兩項(xiàng)可得:
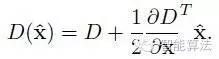
若  ,該特征點(diǎn)就保留下來,否則丟棄。
,該特征點(diǎn)就保留下來,否則丟棄。
邊緣響應(yīng)的去除
一個(gè)定義不好的高斯差分算子的極值在橫跨邊緣的地方有較大的主曲率,而在垂直邊緣的方向有較小的主曲率。主曲率通過一個(gè)2×2 的Hessian矩陣H求出:
導(dǎo)數(shù)由采樣點(diǎn)相鄰差估計(jì)得到。D的主曲率和H的特征值成正比,令α為較大特征值,β為較小的特征值,則
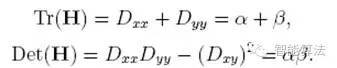
令α=γβ,則

(r + 1)2/r的值在兩個(gè)特征值相等的時(shí)候最小,隨著r的增大而增大,因此,為了檢測主曲率是否在某域值r下,只需檢測
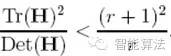
if (α+β)/ αβ> (r+1)2/r, throw it out. 在Lowe的文章中,取r=10。
2.4.關(guān)鍵點(diǎn)描述
上一步中確定了每幅圖中的特征點(diǎn),為每個(gè)特征點(diǎn)計(jì)算一個(gè)方向,依照這個(gè)方向做進(jìn)一步的計(jì)算,利用關(guān)鍵點(diǎn)鄰域像素的梯度方向分布特性為每個(gè)關(guān)鍵點(diǎn)指定方向參數(shù),使算子具備旋轉(zhuǎn)不變性。

為(x,y)處梯度的模值和方向公式。其中L所用的尺度為每個(gè)關(guān)鍵點(diǎn)各自所在的尺度。至此,圖像的關(guān)鍵點(diǎn)已經(jīng)檢測完畢,每個(gè)關(guān)鍵點(diǎn)有三個(gè)信息:位置,所處尺度、方向,由此可以確定一個(gè)SIFT特征區(qū)域。
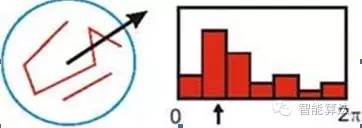
梯度直方圖的范圍是0~360度,其中每10度一個(gè)柱,總共36個(gè)柱。隨著距中心點(diǎn)越遠(yuǎn)的領(lǐng)域其對直方圖的貢獻(xiàn)也響應(yīng)減小.Lowe論文中還提到要使用高斯函數(shù)對直方圖進(jìn)行平滑,減少突變的影響。
在實(shí)際計(jì)算時(shí),我們在以關(guān)鍵點(diǎn)為中心的鄰域窗口內(nèi)采樣,并用直方圖統(tǒng)計(jì)鄰域像素的梯度方向。梯度直方圖的范圍是0~360度,其中每45度一個(gè)柱,總共8個(gè)柱, 或者每10度一個(gè)柱,總共36個(gè)柱。Lowe論文中還提到要使用高斯函數(shù)對直方圖進(jìn)行平滑,減少突變的影響。直方圖的峰值則代表了該關(guān)鍵點(diǎn)處鄰域梯度的主方向,即作為該關(guān)鍵點(diǎn)的方向。
直方圖中的峰值就是主方向,其他的達(dá)到最大值80%的方向可作為輔助方向,通過對關(guān)鍵點(diǎn)周圍圖像區(qū)域分塊,計(jì)算塊內(nèi)梯度直方圖,生成具有獨(dú)特性的向量,這個(gè)向量是該區(qū)域圖像信息的一種抽象,具有唯一性。首先將坐標(biāo)軸旋轉(zhuǎn)為關(guān)鍵點(diǎn)的方向,以確保旋轉(zhuǎn)不變性。以關(guān)鍵點(diǎn)為中心取8×8的窗口。
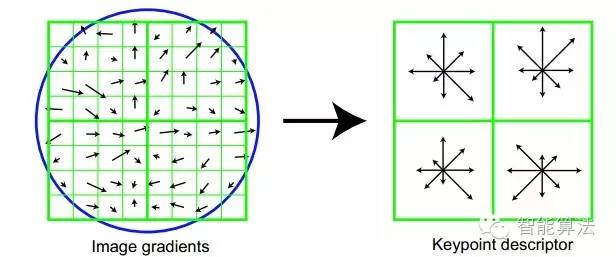
16*16的圖中其中1/4的特征點(diǎn)梯度方向及scale,右圖為其加權(quán)到8個(gè)主方向后的效果。圖左部分的中央為當(dāng)前關(guān)鍵點(diǎn)的位置,每個(gè)小格代表關(guān)鍵點(diǎn)鄰域所在尺度空間的一個(gè)像素,利用公式求得每個(gè)像素的梯度幅值與梯度方向,箭頭方向代表該像素的梯度方向,箭頭長度代表梯度模值,然后用高斯窗口對其進(jìn)行加權(quán)運(yùn)算。
圖中藍(lán)色的圈代表高斯加權(quán)的范圍(越靠近關(guān)鍵點(diǎn)的像素梯度方向信息貢獻(xiàn)越大)。然后在每4×4的小塊上計(jì)算8個(gè)方向的梯度方向直方圖,繪制每個(gè)梯度方向的累加值,即可形成一個(gè)種子點(diǎn),如圖右部分示。此圖中一個(gè)關(guān)鍵點(diǎn)由2×2共4個(gè)種子點(diǎn)組成,每個(gè)種子點(diǎn)有8個(gè)方向向量信息。這種鄰域方向性信息聯(lián)合的思想增強(qiáng)了算法抗噪聲的能力,同時(shí)對于含有定位誤差的特征匹配也提供了較好的容錯(cuò)性。
計(jì)算keypoint周圍的16*16的window中每一個(gè)像素的梯度,而且使用高斯下降函數(shù)降低遠(yuǎn)離中心的權(quán)重。
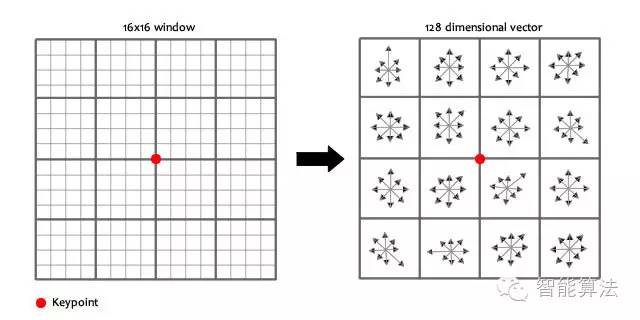
在每個(gè)4*4的1/16象限中,通過加權(quán)梯度值加到直方圖8個(gè)方向區(qū)間中的一個(gè),計(jì)算出一個(gè)梯度方向直方圖。這樣就可以對每個(gè)feature形成一個(gè)4*4*8=128維的描述子,每一維都可以表示4*4個(gè)格子中一個(gè)的scale/orientation. 將這個(gè)向量歸一化之后,就進(jìn)一步去除了光照的影響。
2.5.關(guān)鍵點(diǎn)匹配
生成了A、B兩幅圖的描述子,(分別是k1*128維和k2*128維),就將兩圖中各個(gè)scale(所有scale)的描述子進(jìn)行匹配,匹配上128維即可表示兩個(gè)特征點(diǎn)match上了。
實(shí)際計(jì)算過程中,為了增強(qiáng)匹配的穩(wěn)健性,Lowe建議對每個(gè)關(guān)鍵點(diǎn)使用4×4共16個(gè)種子點(diǎn)來描述,這樣對于一個(gè)關(guān)鍵點(diǎn)就可以產(chǎn)生128個(gè)數(shù)據(jù),即最終形成128維的SIFT特征向量。此時(shí)SIFT特征向量已經(jīng)去除了尺度變化、旋轉(zhuǎn)等幾何變形因素的影響,再繼續(xù)將特征向量的長度歸一化,則可以進(jìn)一步去除光照變化的影響。當(dāng)兩幅圖像的SIFT特征向量生成后,下一步我們采用關(guān)鍵點(diǎn)特征向量的歐式距離來作為兩幅圖像中關(guān)鍵點(diǎn)的相似性判定度量。取圖像1中的某個(gè)關(guān)鍵點(diǎn),并找出其與圖像2中歐式距離最近的前兩個(gè)關(guān)鍵點(diǎn),在這兩個(gè)關(guān)鍵點(diǎn)中,如果最近的距離除以次近的距離少于某個(gè)比例閾值,則接受這一對匹配點(diǎn)。降低這個(gè)比例閾值,SIFT匹配點(diǎn)數(shù)目會減少,但更加穩(wěn)定。
為了排除因?yàn)閳D像遮擋和背景混亂而產(chǎn)生的無匹配關(guān)系的關(guān)鍵點(diǎn),Lowe提出了比較最近鄰距離與次近鄰距離的方法,距離比率ratio小于某個(gè)閾值的認(rèn)為是正確匹配。因?yàn)閷τ阱e(cuò)誤匹配,由于特征空間的高維性,相似的距離可能有大量其他的錯(cuò)誤匹配,從而它的ratio值比較高。Lowe推薦ratio的閾值為0.8。但作者對大量任意存在尺度、旋轉(zhuǎn)和亮度變化的兩幅圖片進(jìn)行匹配,結(jié)果表明ratio取值在0. 4~0. 6之間最佳,小于0. 4的很少有匹配點(diǎn),大于0. 6的則存在大量錯(cuò)誤匹配點(diǎn)。(如果這個(gè)地方你要改進(jìn),最好給出一個(gè)匹配率和ration之間的關(guān)系圖,這樣才有說服力)作者建議ratio的取值原則如下:
ratio=0. 4對于準(zhǔn)確度要求高的匹配;
ratio=0. 6對于匹配點(diǎn)數(shù)目要求比較多的匹配;
ratio=0. 5一般情況下。
也可按如下原則:當(dāng)最近鄰距離<200時(shí)ratio=0. 6,反之ratio=0. 4。ratio的取值策略能排分錯(cuò)誤匹配點(diǎn)。
當(dāng)兩幅圖像的SIFT特征向量生成后,下一步我們采用關(guān)鍵點(diǎn)特征向量的歐式距離來作為兩幅圖像中關(guān)鍵點(diǎn)的相似性判定度量。取圖像1中的某個(gè)關(guān)鍵點(diǎn),并找出其與圖像2中歐式距離最近的前兩個(gè)關(guān)鍵點(diǎn),在這兩個(gè)關(guān)鍵點(diǎn)中,如果最近的距離除以次近的距離少于某個(gè)比例閾值,則接受這一對匹配點(diǎn)。降低這個(gè)比例閾值,SIFT匹配點(diǎn)數(shù)目會減少,但更加穩(wěn)定。
責(zé)任編輯:lq
-
算法
+關(guān)注
關(guān)注
23文章
4629瀏覽量
93303 -
圖像數(shù)據(jù)
+關(guān)注
關(guān)注
0文章
52瀏覽量
11312 -
SIFT算法
+關(guān)注
關(guān)注
0文章
8瀏覽量
7458
原文標(biāo)題:經(jīng)典的圖像匹配算法----SIFT
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
請問ads1292算法支持實(shí)現(xiàn)疲勞監(jiān)測嗎?
【「從算法到電路—數(shù)字芯片算法的電路實(shí)現(xiàn)」閱讀體驗(yàn)】+內(nèi)容簡介
【「從算法到電路—數(shù)字芯片算法的電路實(shí)現(xiàn)」閱讀體驗(yàn)】+介紹基礎(chǔ)硬件算法模塊
【「從算法到電路—數(shù)字芯片算法的電路實(shí)現(xiàn)」閱讀體驗(yàn)】+一本介紹基礎(chǔ)硬件算法模塊實(shí)現(xiàn)的好書
Pure path studio內(nèi)能否自己創(chuàng)建一個(gè)component,來實(shí)現(xiàn)特定的算法,例如LMS算法?
請問TLV320AIC3256 mini DSP是否能實(shí)現(xiàn)降噪算法?
名單公布!【書籍評測活動NO.46】從算法到電路 | 數(shù)字芯片算法的電路實(shí)現(xiàn)
C加密算法的實(shí)現(xiàn)

利用Matlab函數(shù)實(shí)現(xiàn)深度學(xué)習(xí)算法
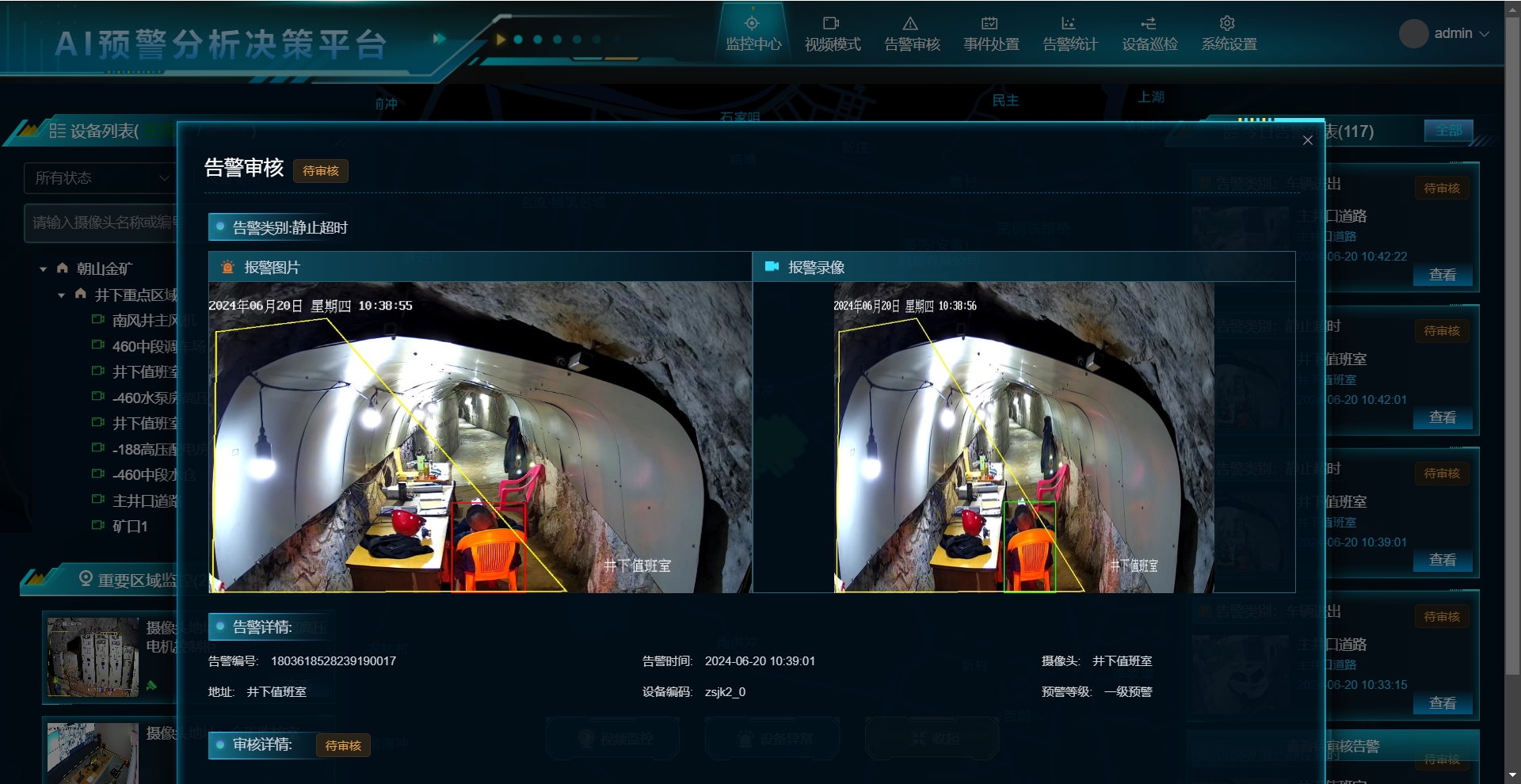
中偉視界:智能監(jiān)控和預(yù)警,靜止超時(shí)AI算法如何提升非煤礦山安全?
神經(jīng)網(wǎng)絡(luò)反向傳播算法的原理、數(shù)學(xué)推導(dǎo)及實(shí)現(xiàn)步驟
FPGA能實(shí)現(xiàn)什么樣的算法?
中國鐵路網(wǎng)的Dijkstra算法實(shí)現(xiàn)案例





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論