 Vitis初探—1.將設計從SDSoC/Vivado HLS遷移到Vitis上的教程
Vitis初探—1.將設計從SDSoC/Vivado HLS遷移到Vitis上的教程
〇、前言
2020.11.25日,Xilinx更新了Vitis2020.2版本。正好之前報名里Xilinx的自適應計算挑戰賽,比賽要求使用Vitis平臺進行開發,所以今天趁著新版本發布把我之前參加DAC-SDC的項目SkrSkr遷移到Vitis平臺上。之前聽過一些介紹說Vitis將SDAccel和SDSoC合并到了一起,并使用OpenCL語言,所以在項目遷移之前我還是有點打怵的,但是經過一天的嘗試基本搞定了。整個流程走下來感覺Vitis跟SDSoC換湯不換藥,只是調用加速器的方式稍有變化,整體的設計思想還是一致的。下面就進入正題,如何一步一步將設計從SDSoC/Vivado HLS遷移到Vitis平臺。
一、環境準備
1.安裝Vitis,此處省略
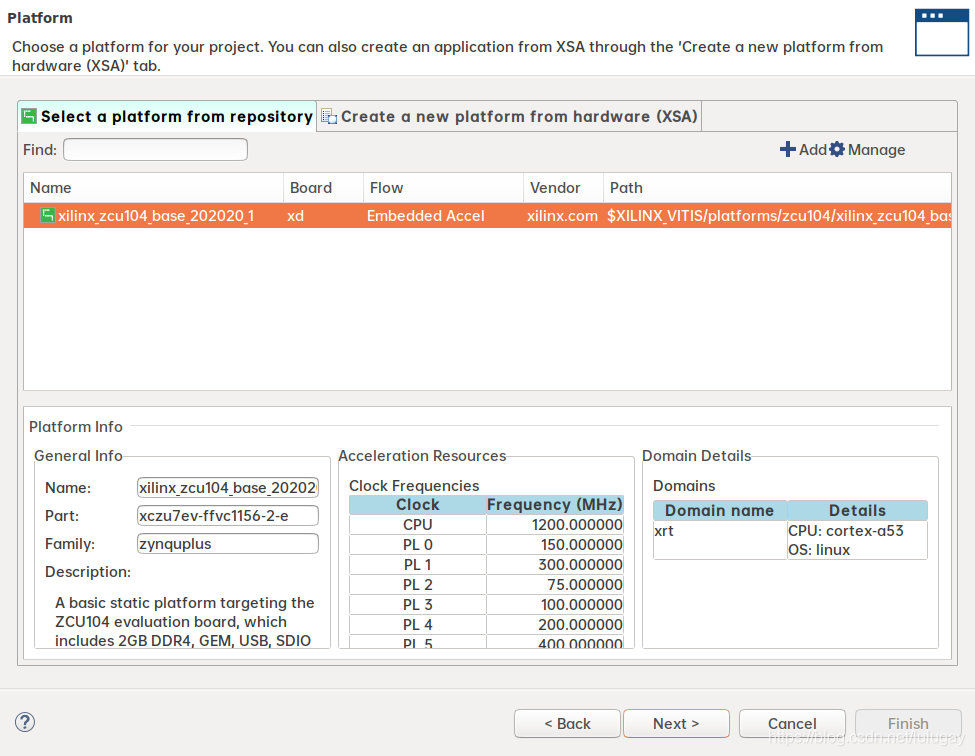
2. 安裝zcu104的platform
下載zcu104的base platform
從https://www.xilinx.com/support/download/index.html/content/xilinx/en/dow...下載ZCU104 Base 2020.2以及ZYNQMP common image
將ZCU104 Base 2020.2解壓到/tools/Xilinx/Vitis/2020.2/platforms/(Vitis的默認安裝目錄)
3. 準備sysroot
將ZYNQMP common image解壓到任意位置,并將rootfs.tar.gz進一步解壓
mkdir sysroot tar -xvf rootfs.tar.gz -C sysroot
文件內容如下所示
├── bl31.elf ├── boot.scr ├── Image ├── README.txt ├── rootfs.ext4 ├── rootfs.manifest ├── rootfs.tar.gz ├── sdk.sh ├── sysroot └── u-boot.elf
二、創建工程
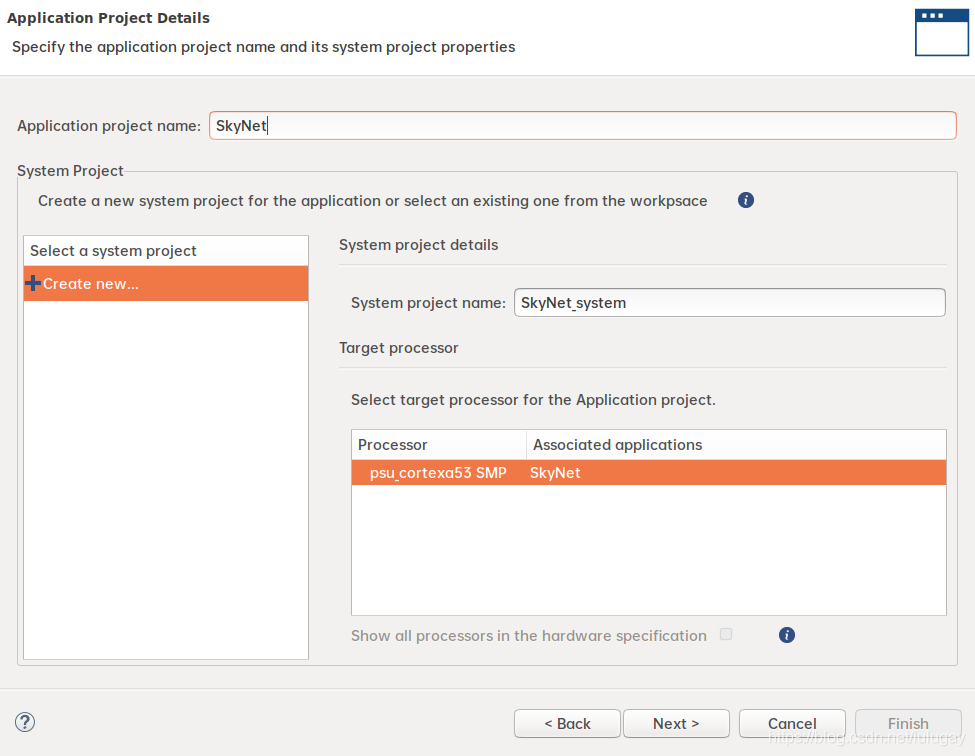
sysroot,rootfs,kernel image指向剛才解壓出來的那些文件
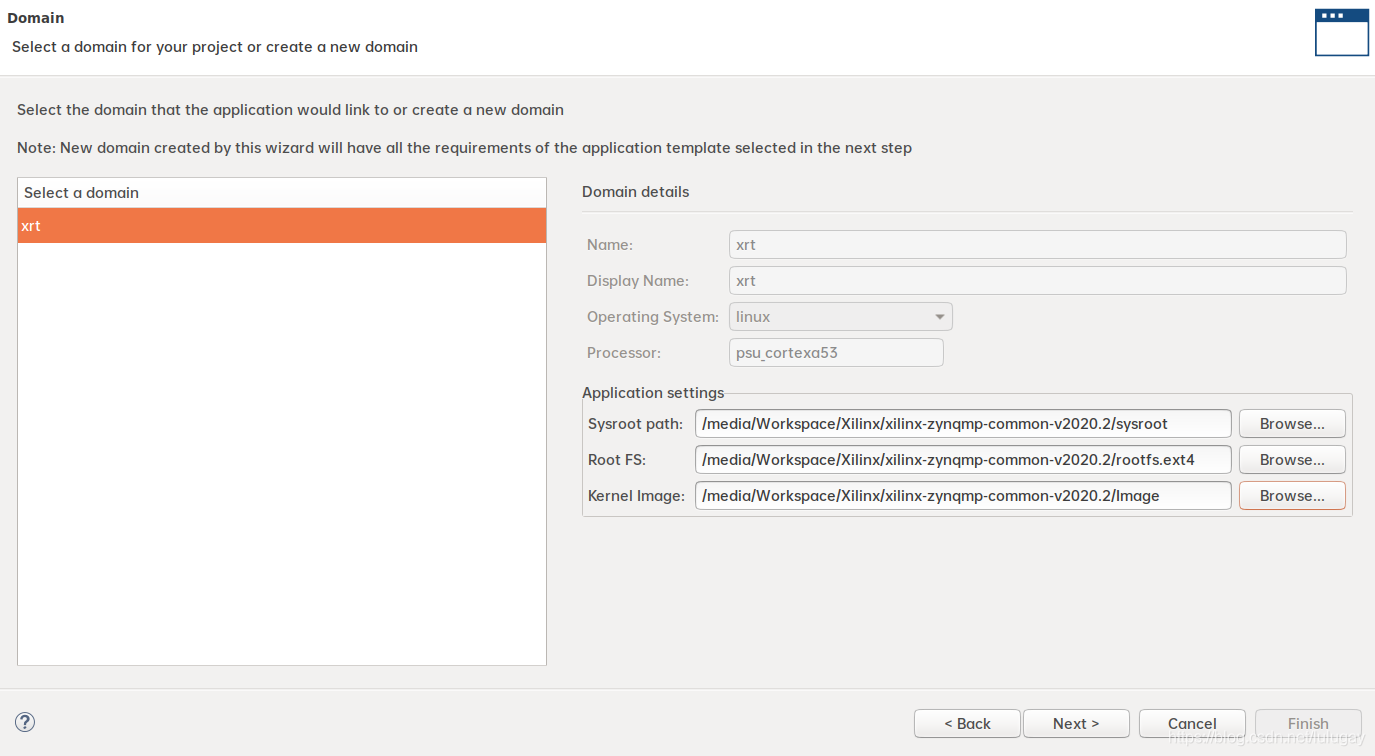
然后選擇空工程,至此新工程創建完畢
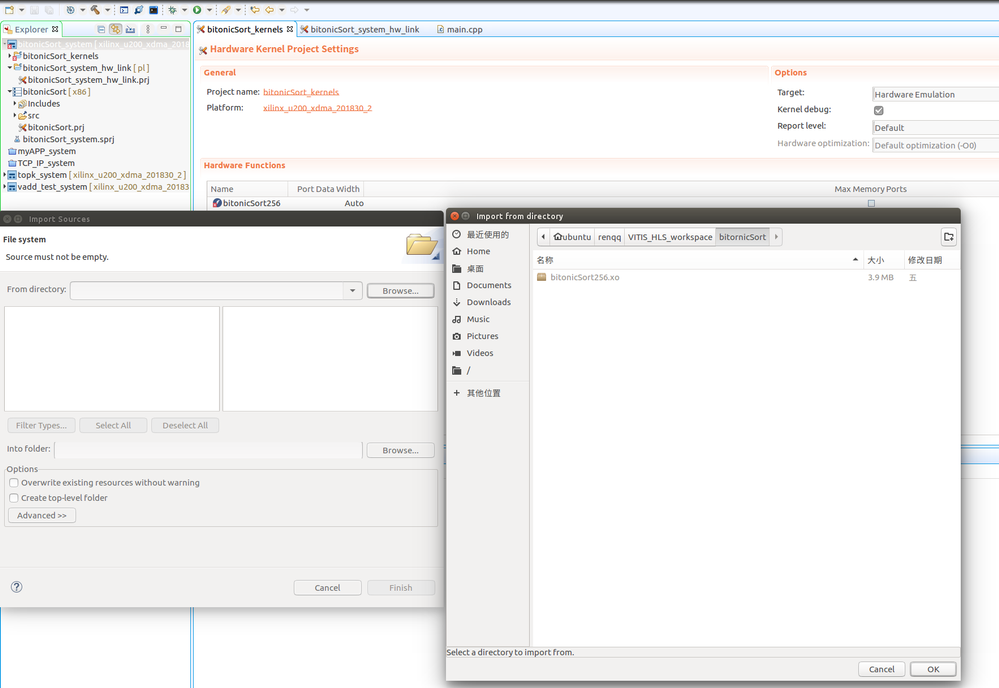
SkrSkr/Develop/C下邊的5個文件導入
. ├── main.cpp ├── SkyNet.cpp ├── SkyNet.h ├── transform.cpp └── utils.cpp
將SkyNet.cpp和SkyNet.h復制到SkyNet_kernels/src下,將main.cpp, SkyNet.h, transform.cpp, utils.cpp復制到SkyNet/src下,如圖所示
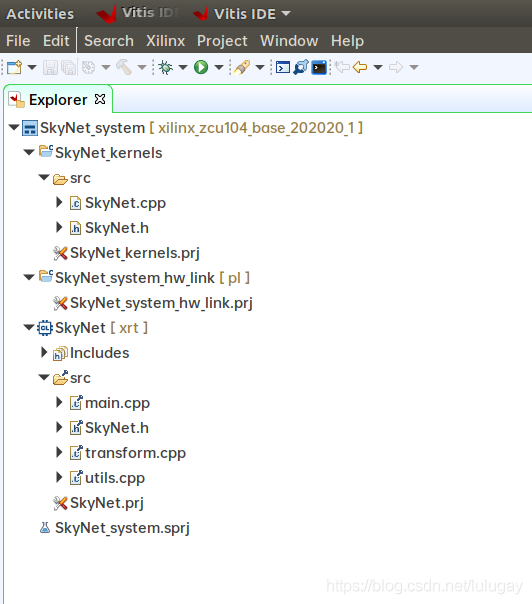
SkyNet/src下存放的是Host端代碼,而SkyNet_kernels/src下存放的是FPGA端代碼,二者在編譯的時候是獨立的。對比之前Vivado HLS的開發流程,SkyNet_kernels/src下放的就是Vivado HLS工程里的文件,但是沒有testbench,而SkyNet/src放的就是綜合出來比特流之后在SDK里開發應用程序的文件。(SDSoC好用就好用在將SDK的應用程序代碼跟Vivado HLS里的testbench合并,邏輯上很直觀。Vitis這么搞純粹是為了上層使用OpenCL,個人認為是倒退。但是好處是不會像SDSoC稍微修改一點代碼就可能導致整個工程重新編譯一遍)
三、修改源代碼
1. 修改SkyNet.cpp
SkyNet.cpp的設計基本不用動,唯一需要修改的就是接口定義
void SkyNet(ADT4* img, ADT32* fm, WDT32* weight, BDT16* biasm)
{
#pragma HLS INTERFACE m_axi depth=204800 port=img offset=slave bundle=fm
#pragma HLS INTERFACE m_axi depth=628115 port=fm offset=slave bundle=fm
#pragma HLS INTERFACE m_axi depth=13792 port=weight offset=slave bundle=wt
#pragma HLS INTERFACE m_axi depth=432 port=biasm offset=slave bundle=bm
#pragma HLS INTERFACE s_axilite register port=return
#pragma HLS ALLOCATION instances=PWCONV1x1 limit=1 function
#pragma HLS ALLOCATION instances=DWCONV3x3 limit=1 function
將接口定義刪掉即可
void SkyNet(ADT4* img, ADT32* fm, WDT32* weight, BDT16* biasm)
{
#pragma HLS ALLOCATION instances=PWCONV1x1 limit=1 function
#pragma HLS ALLOCATION instances=DWCONV3x3 limit=1 function
2. 修改SkyNet/src/SkyNet.h
kernel端的SkyNet.h無需修改,但是Host端因為要用OpenCL來調用加速器,因此需要在頭文件中加入相關代碼(就是從案例vadd中復制過來的)
#ifndef SKYNET_H #define SKYNET_H #pragma once #define CL_HPP_CL_1_2_DEFAULT_BUILD #define CL_HPP_TARGET_OPENCL_VERSION 120 #define CL_HPP_MINIMUM_OPENCL_VERSION 120 #define CL_HPP_ENABLE_PROGRAM_CONSTRUCTION_FROM_ARRAY_COMPATIBILITY 1 #include #include #include #include #include #include #include #include #include #include #include #include "ap_int.h"
3.修改SkyNet/src/SkyNet.cpp
這部分改動比較大,主要就是要用OpenCL的方式加載Kernel,分配內存,還是以vadd的案例作為參照。
1. 首先把加載kernel部分代碼全盤復制過來
int main(int argc, char* argv[]) {
if(argc != 2) {
std::cout << "Usage: " << argv[0] <<" "<< std::endl;
return EXIT_FAILURE;
}
char* xclbinFilename = argv[1];
std::vector devices;
cl::Device device;
std::vector platforms;
bool found_device = false;
cl::Platform::get(&platforms);
for(size_t i = 0; (i < platforms.size() ) & (found_device == false) ;i++){
cl::Platform platform = platforms[i];
std::string platformName = platform.getInfo();
if ( platformName == "Xilinx"){
devices.clear();
platform.getDevices(CL_DEVICE_TYPE_ACCELERATOR, &devices);
if (devices.size()){
device = devices[0];
found_device = true;
break;
}
}
}
if (found_device == false){
std::cout << "Error: Unable to find Target Device "
<< device.getInfo() << std::endl;
return EXIT_FAILURE;
}
// Creating Context and Command Queue for selected device
cl::Context context(device);
cl::CommandQueue q(context, device, CL_QUEUE_PROFILING_ENABLE);
// Load xclbin
std::cout << "Loading: '" << xclbinFilename << "'/n";
std::ifstream bin_file(xclbinFilename, std::ifstream::binary);
bin_file.seekg (0, bin_file.end);
unsigned n_b = bin_file.tellg();
bin_file.seekg (0, bin_file.beg);
char *buf = new char [n_b];
bin_file.read(buf, n_b);
// Creating Program from Binary File
cl::Program::Binaries bins;
bins.push_back({buf,n_b});
devices.resize(1);
cl::Program program(context, devices, bins);
2. 聲明kernel
cl::Kernel krnl_SkyNet(program,"SkyNet");
3. 分配kernel端內存cl::buffer
在SDSoC中我們要給權重、特征圖等buffer分配連續內存地址,
img = (ADT4*)sds_alloc(4*160*320*sizeof(ADT4)); weight = (WDT32*)sds_alloc(441344*sizeof(WDT)); biasm = (BDT16*)sds_alloc(432*sizeof(BDT16)); fm = (ADT32*)sds_alloc(32*fm_all*sizeof(ADT));
在PYNQ框架中我們用xlnk分配連續內存地址
img = xlnk.cma_array(shape=[4,160,320,4], dtype=np.uint8) fm = xlnk.cma_array(shape=(628115*32), dtype=np.uint8) weight = xlnk.cma_array(shape=(220672), dtype=np.int16) biasm = xlnk.cma_array(shape=(432*16), dtype=np.int16)
其中img和weight對于加速器來說是只讀不寫,但是biasm和fm既讀又寫,這一點在SDSoC和PYNQ中都無需刻意區分,但是在OpenCL需要額外注意。
cl::Buffer(按照我的理解)是在DDR中給kernel(FPGA)端分配一段內存,
cl::Buffer buffer_img(context, CL_MEM_READ_ONLY, 160*320*sizeof(ADT16));
cl::Buffer buffer_fm(context, CL_MEM_READ_WRITE, 32*fm_all*sizeof(ADT));
cl::Buffer buffer_wt(context, CL_MEM_READ_ONLY, 441344*sizeof(WDT));
cl::Buffer buffer_bm(context, CL_MEM_READ_WRITE, 432*sizeof(BDT16));
所以其讀寫是從kernel端看的,加速器中對img只是讀沒有寫,所以在聲明cl::Buffer時用CL_MEM_READ_ONLY,而fm和biasm既有讀又有寫,所以用CL_MEM_READ_WRITE。
4. 配置加速器
在PYNQ框架里我們要把加速器各個端口對應對物理地址傳給加速器
SkyNet = overlay.SkyNet SkyNet.write(0x10, img.physical_address) SkyNet.write(0x1c, fm.physical_address) SkyNet.write(0x28, weight.physical_address) SkyNet.write(0x34, biasm.physical_address)
在SDSoC中這個步驟工具會自動生成相應的代碼,但是在OpenCL中需要手動指定,需要注意參數的順序要跟function的順序一致。
//set the kernel Arguments
int narg=0;
krnl_SkyNet.setArg(narg++,buffer_img);
krnl_SkyNet.setArg(narg++,buffer_fm);
krnl_SkyNet.setArg(narg++,buffer_wt);
krnl_SkyNet.setArg(narg++,buffer_bm);
5.分 配Host端內存
在PYNQ框架中我們并不能直接訪問屬于加速器的內存片段,因此在Host端都是操作numpy數組,然后將numpy數組的數據復制到屬于加速器的內存片段
parameter = np.fromfile("SkyNet.bin", dtype=np.int16)
np.copyto(weight, parameter[0:220672])# 從numpy數組復制到加速器內存
np.copyto(biasm[0:428*16], parameter[220672:])
print("Parameters loading done")
bbox_origin = np.empty(64, dtype=np.int16)
bbox = np.zeros((4,4),dtype=np.float32)
result= open('predict.txt','w+')
batch_buff = None
image = np.zeros((4,160,320,4),np.uint8)
image_buff = np.zeros((4,160,320,4),np.uint8)
...
np.copyto(bbox_origin, biasm[428*16:])# 從加速器內存復制到numpy數組
...
再次強調一下在SDSoC中不區分Host端內存和Kernel端內存
img = (ADT4*)sds_alloc(4*160*320*sizeof(ADT4)); weight = (WDT32*)sds_alloc(441344*sizeof(WDT)); biasm = (BDT16*)sds_alloc(432*sizeof(BDT16)); fm = (ADT32*)sds_alloc(32*fm_all*sizeof(ADT));
在OpenCL中要將Kernel端內存映射到Host端內存
ADT32* img = (ADT32*) q.enqueueMapBuffer (buffer_img , CL_TRUE , CL_MAP_WRITE , 0, 160*320*sizeof(ADT32));
ADT32* ofm_blob32 = (ADT32*) q.enqueueMapBuffer (buffer_fm , CL_TRUE , CL_MAP_READ | CL_MAP_WRITE , 0, fm_all*sizeof(ADT32));
WDT32* weight = (WDT32*) q.enqueueMapBuffer (buffer_wt , CL_TRUE , CL_MAP_WRITE , 0, 441344*sizeof(WDT));
BDT16* biasm = (BDT16*) q.enqueueMapBuffer (buffer_bm , CL_TRUE , CL_MAP_READ | CL_MAP_WRITE , 0, 432*sizeof(BDT16));
需要說明的是此時對讀寫是從Host端開過來的,所以與Kernel端配置反過來。
6. 啟動加速器
在PYNQ里我們用如下代碼控制加速器啟動與停止
SkyNet.write(0x00, 1)
isready = SkyNet.read(0x00)
while( isready == 1 ):
isready = SkyNet.read(0x00)
在OpenCL中對應的代碼稍微復雜一點點,如下所示
q.enqueueMigrateMemObjects({buffer_img,buffer_wt},0/* 0 means from Host*/);
q.enqueueTask(krnl_SkyNet);
q.enqueueMigrateMemObjects({buffer_fm,buffer_bm},CL_MIGRATE_MEM_OBJECT_HOST);
q.finish();
在這里又一次出現了對內存的配置,q.enqueueMigrateMemObjects的用法我不是非常清楚,但是大概意思就是CL_MIGRATE_MEM_OBJECT_HOST選項表示Host在啟動加速器之后還得回去接收數據,而0就不用。加速器運行完后邊的數據處理跟SDSoC里是完全一致的。
7. 回收內存
q.enqueueUnmapMemObject(buffer_img, img);
q.enqueueUnmapMemObject(buffer_fm, ofm_blob32);
q.enqueueUnmapMemObject(buffer_wt, weight);
q.enqueueUnmapMemObject(buffer_bm, biasm);
q.finish();
四、編譯工程
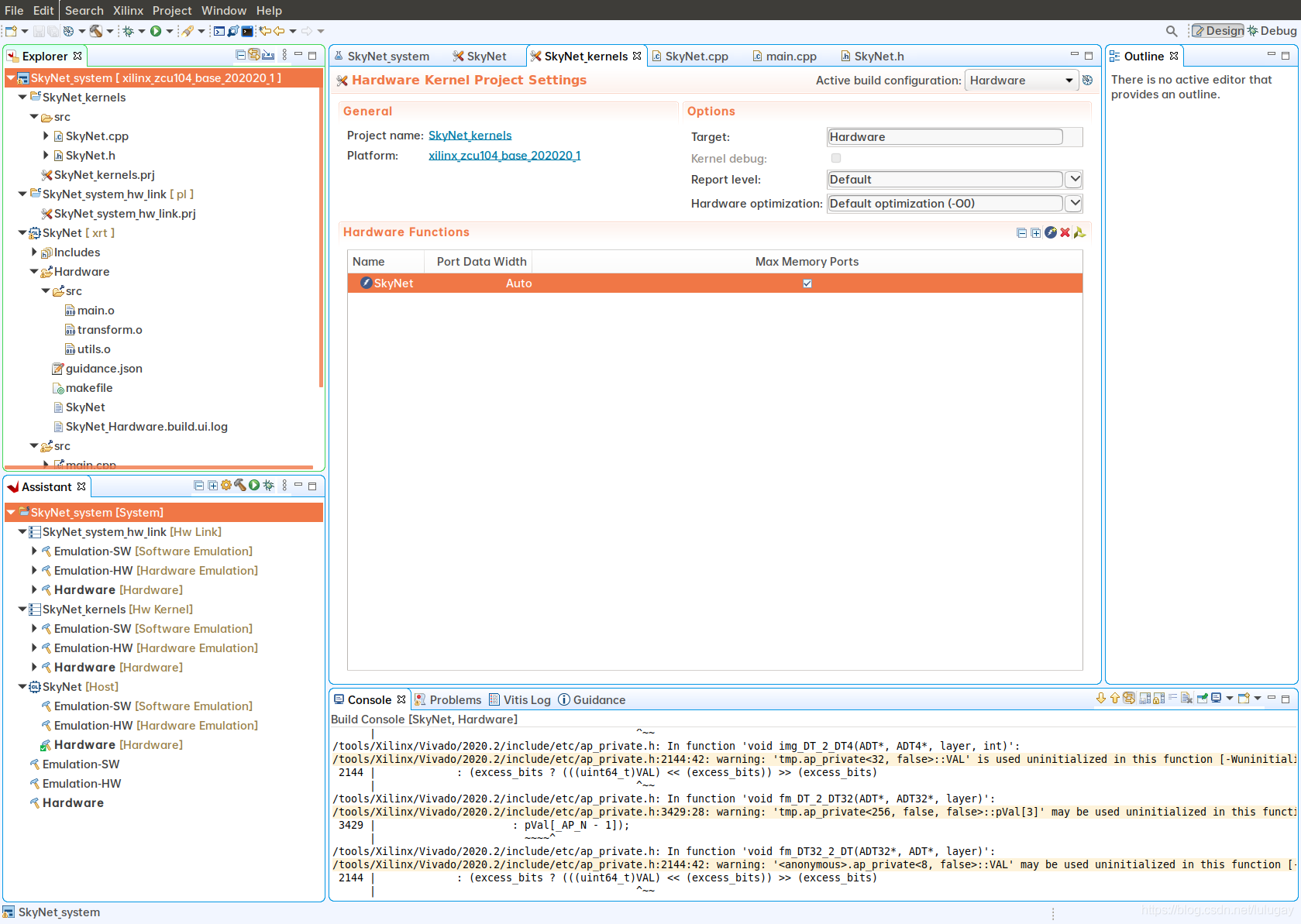
1. 選擇硬件函數
現在的工程并沒有選擇硬件函數加速
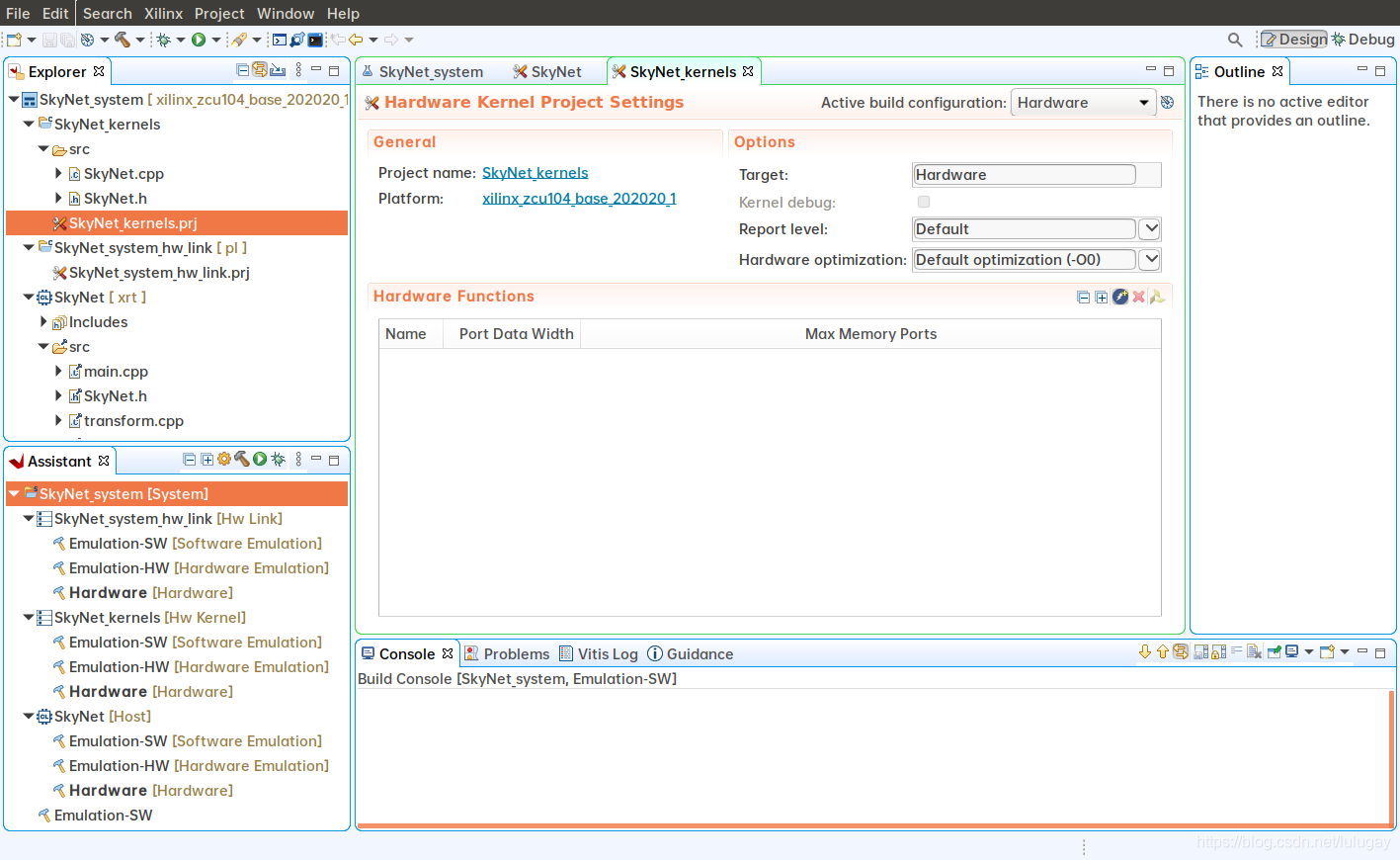
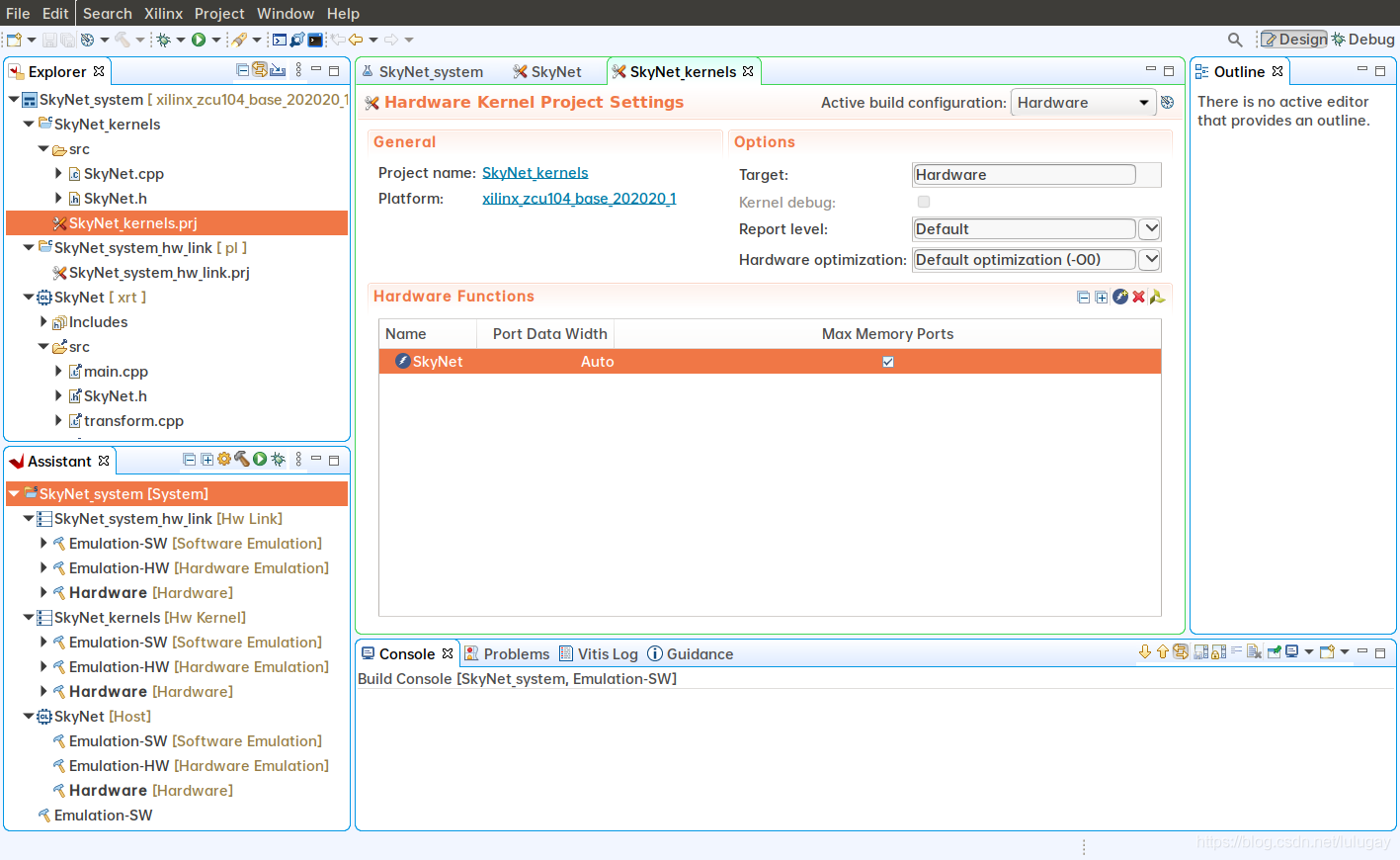
點擊Hardware Functions里的藍色按鈕將SkyNet添加為硬件函數,并勾選Max Memory Ports。
2. 編譯工程
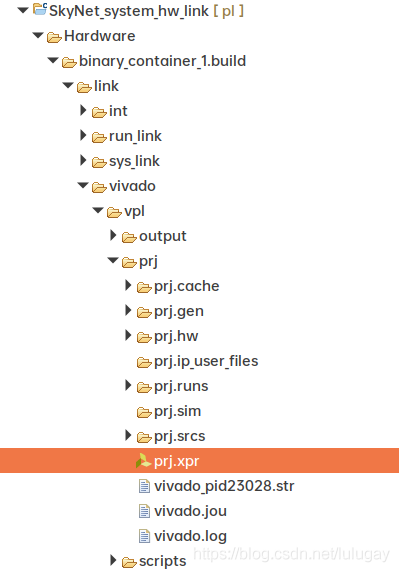
將Activation build configuration改為Hardware,點擊左側的菜單欄SkyNet_system,然后點擊小錘子,整個工程就開始編譯了。在R7 3700X上大概20分鐘就能編譯完成。
SkyNet文件夾存放Host端調用加速器的代碼,SkyNet_kernels文件夾存放FPGA端的加速器代碼,但是加速器端代碼還只是代碼,并不是一個比特流,SkyNet_system_hw_link文件夾用來存放Vivado工程,生成的比特流就在這個文件夾下。編譯完畢我們可以在SkyNet_system_hw_link找到Vivado工程
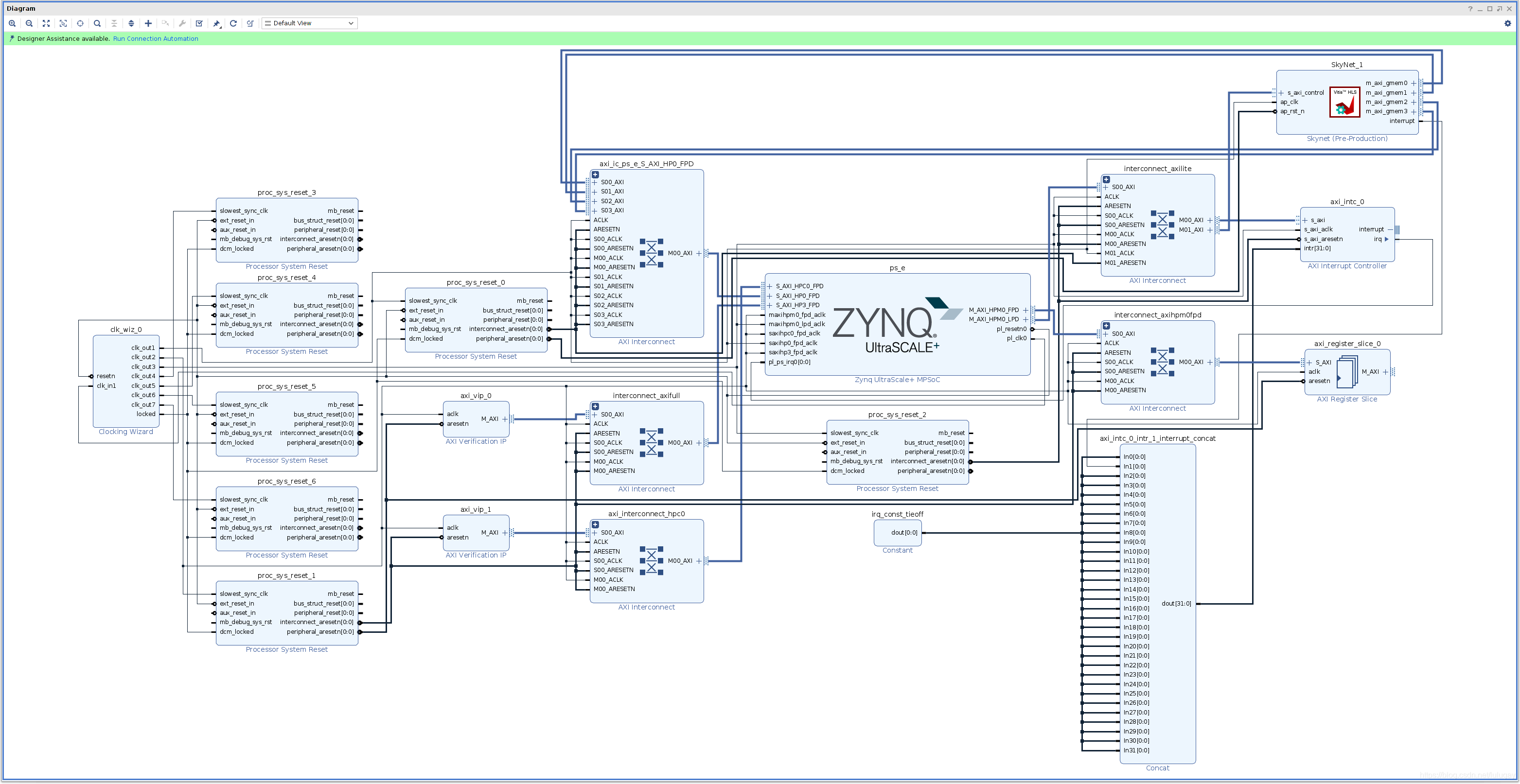
打開看一下block diagram,可以發現勾選Max Memory Ports生效了,加速器總共生成了4個M_AXI接口,如果不勾選Max Memory Ports那么四個接口就會bundle到一起,影響加速器的傳輸性能。
五、上板測試
1. 燒寫SD卡
在編譯好的工程下我們可以看到如下文件
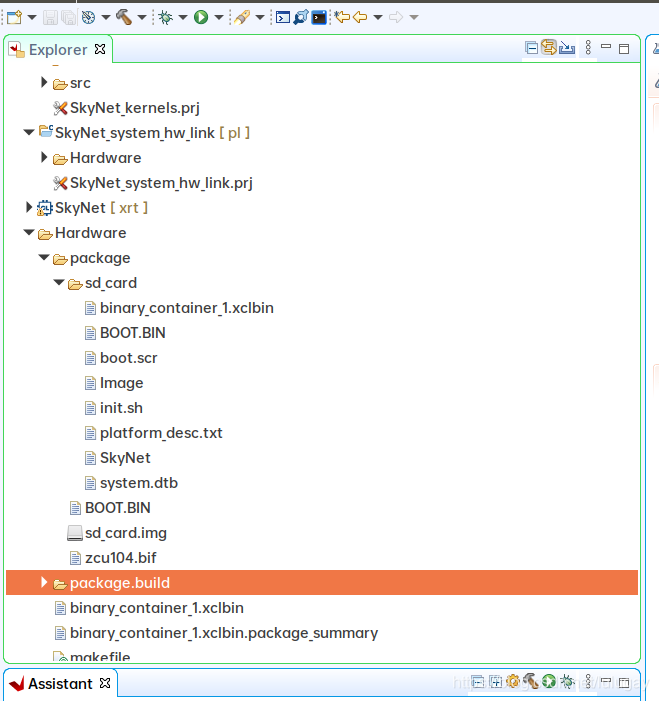
我們把sd_card.img文件復制到windows電腦上燒寫進SD卡,具體怎么燒寫之前的博文中有提到,在此不再重復
2. 準備文件
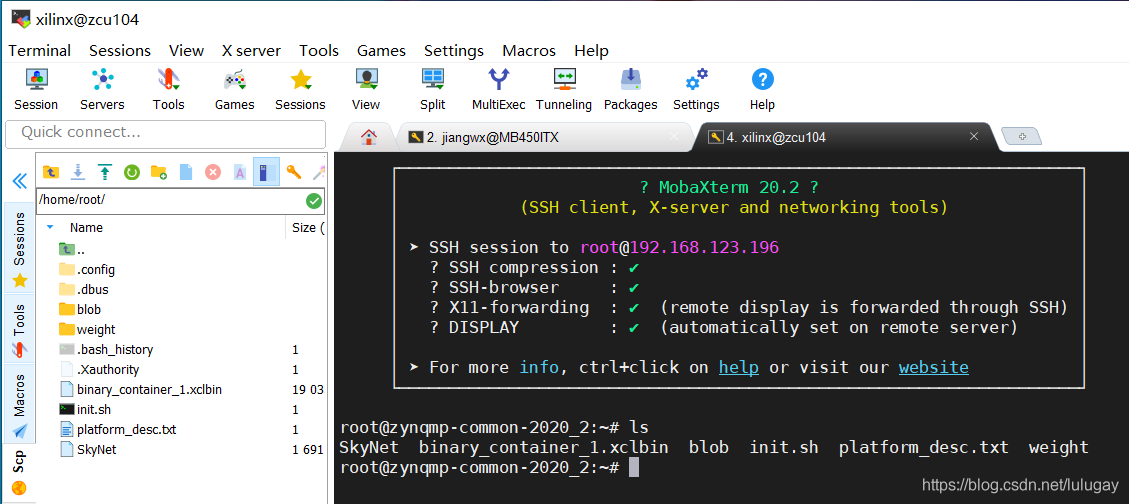
用Mobaxterm登錄板子,默認用戶名和密碼都是root。將SkyNet,init.sh,binary_container_1.xclbin以及SkrSkr/Develop/C/blob和SkrSkr/Develop/C/weight復制到/home/root下,如圖所示
配置一下xrt環境
./init.sh
然后就可以開始測試啦
至此移植工作全部結束。目前的linux系統是Vitis自動生成的(其實應該是Petalinux構建出來的),可用性很差,后邊會嘗試把Vitis跟PYNQ結合,將Vitis生成的可執行文件放在PYNQ提供的運行環境下執行。
審核編輯 黃昊宇
-
SDSoC
+關注
關注
0文章
24瀏覽量
12220 -
Vitis
+關注
關注
0文章
146瀏覽量
7439
發布評論請先 登錄
相關推薦
Vitis2023.2使用之—— updata to Vitis Unified IDE
使用Vitis HLS創建屬于自己的IP相關資料分享
將SDAccel項目遷移到Vitis 2019.2的技巧
Vivado HLS和Vitis HLS 兩者之間有什么區別
基于Vitis HLS的加速圖像處理
Vitis HLS工具簡介及設計流程
Vitis HLS如何添加HLS導出的.xo文件
Vitis HLS前端現已全面開源
Vitis HLS知識庫總結
理解Vitis HLS默認行為
AMD全新Vitis HLS資源現已推出
如何在Vitis HLS GUI中使用庫函數?







 工商網監
工商網監
評論