 研究人員使用事件驅動型圖像傳感器提升無人機的安全性
研究人員使用事件驅動型圖像傳感器提升無人機的安全性
蘇黎世大學(University of Zurich,簡稱“UZH”)和代爾夫特理工大學(Delft University of Technology)研究人員使用事件驅動型圖像傳感器,幫助一架多旋翼無人機在一個電機出現故障時繼續飛行。
據麥姆斯咨詢報道,瑞士和荷蘭的研究人員使用事件驅動型圖像傳感器提升了多旋翼無人機的安全性。
通常,多旋翼無人機的一個電機出現故障時,無人機將會不受控制地旋轉,穩定性變差,導航失靈。這種情況下,大型無人機可以使用全球衛星導航定位系統(GNSS)衛星接收器嘗試重新控制系統,但這對小型無人機來說是無法實現的。
“當其中一個旋翼失靈時,無人機會像芭蕾舞演員一樣旋轉,這種高速旋轉運動會導致標準控制器失效,除非無人機能夠進行非常精確的位置測量。”Davide Scaramuzza說。他是蘇黎世大學機器人及感知小組(Robotics and Perception Group)負責人,也是資助該項研究的瑞士國家機器人能力中心(NCCR Robotics)救援機器人大挑戰(Rescue Robotics Grand Challenge)負責人。
作為一種替代方案,研究人員開發的技術將標準相機數據與僅對圖像變化做出反應的事件驅動型圖像傳感器結合。法國Prophet和英國Opteran等公司正在將這些事件驅動型、神經形態或脈沖神經網絡(Spiking Neural Network,簡稱“SNN”)圖像傳感器商業化。研究團隊計劃將該技術開源發布。
隨著越來越多的無人機被用于運送貨物,這些無人機在發生故障時是否能安全著陸變得越來越重要。
該研究團隊開發了一種算法,結合兩個標準CMOS圖像傳感器信息,追蹤四旋翼無人機相對于參照物的位置。這使得無人機只要還有三個旋翼正常工作,無論是在飛行還是旋轉下,都可以通過機載計算機對其進行控制。
研究人員發現,這兩個標準CMOS圖像傳感器在正常光照條件下都表現良好。“然而,當光照減弱時,標準CMOS圖像傳感器開始出現運動模糊,導致無人機迷失方向,最終墜落,而基于事件驅動的圖像傳感器在非常弱的光照下也能很好地工作。”Scaramuzza實驗室研究人員Sihao Sun說。
“最先進的飛行控制器可以穩定和控制四旋翼無人機,即使在它失去一個完整旋翼的情況下。然而,這些措施依賴于外部傳感器,如全球定位系統(GPS)或運動捕捉系統等,以進行狀態預判。據我們所知,機載傳感器還沒有實現這一點。”他表示。
該問題的主要挑戰來自于不可避免的高速偏航旋轉(超過20弧度/秒),該高速偏航旋轉導致相機運動模糊,這是視覺慣性里程計(Visual Inertial Odometry,簡稱“VIO”)的難題。而基于事件驅動的圖像傳感器具備高動態范圍(High Dynamic Range,簡稱“HDR”)和高時間分辨率。
“實驗表明,我們的方法能夠在一個電機故障情況下準確控制四旋翼無人機位置。我們相信,該方法將提高四旋翼無人機在GPS失靈或信號較差情況下的安全性。”Sun表示。
該團隊計劃將控制器和視覺慣性里程計算法開源發布。
原文標題:事件驅動型圖像傳感器,提升極端情況下無人機的安全性
文章出處:【微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
傳感器
+關注
關注
2552文章
51382瀏覽量
755821 -
控制器
+關注
關注
112文章
16444瀏覽量
179074 -
無人機
+關注
關注
230文章
10515瀏覽量
181817
原文標題:事件驅動型圖像傳感器,提升極端情況下無人機的安全性
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
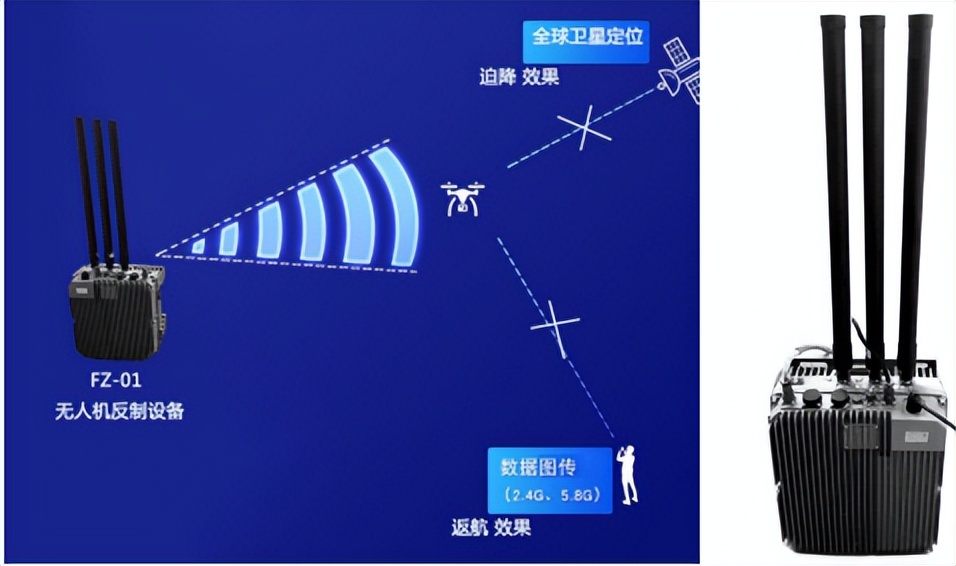
民用無人機反制設備:守護空域安全的重要利器
霍爾傳感器在無人機中的應用

無人機反制系統:構建空中安全的智能防線!特信無人機反制
特信無人機反制設備 手持無人機探測器:精準定位,快速反制





 工商網監
工商網監
評論