 永磁同步電機控制系列的數學模型(8):如何實現弱磁擴速
永磁同步電機控制系列的數學模型(8):如何實現弱磁擴速
1 弱磁擴速理論
PMSM弱磁的思想來源于他勵直流電動機的調磁控制。我們熟知,當他勵直流電動機的端電壓達到最大值之后,無法再用調壓調速來提高轉速,只有通過降低電動機的勵磁電流,從而降低勵磁磁通,實現在保證電壓平衡的條件下,電機速度提升到額定轉速以上。
永磁同步電機的勵磁磁通是由永磁體提供的,這個磁通是恒定不變的。這個時候如果我們想降低磁通強度,就只能通過增大定子電流的去磁分量來削弱氣隙磁通,這樣才能達到跟他勵直流電動機的弱磁等效。
1.1 從公式層面來說明弱磁原理
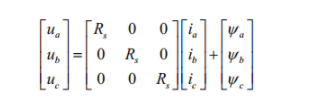
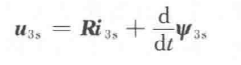
永磁同步電機弱磁控制的本質和規律可以電壓平衡方程來說明
由公式可以看出,在電壓達到最大時,要想再升高轉速,就只能靠調節 id 和 iq 來實現了,這就是電機的弱磁運行方式。同時電機的電流也是由相應的限制的,增大 iq 的同時必須要減小 id,才能保持電流矢量的大小不變。一般是通過增大 id 來實現弱磁擴速的。
1.2 電壓極限環的概念
從公式的推導可以得出電壓極限的軌跡是一個橢圓環,電機的電壓方程為:
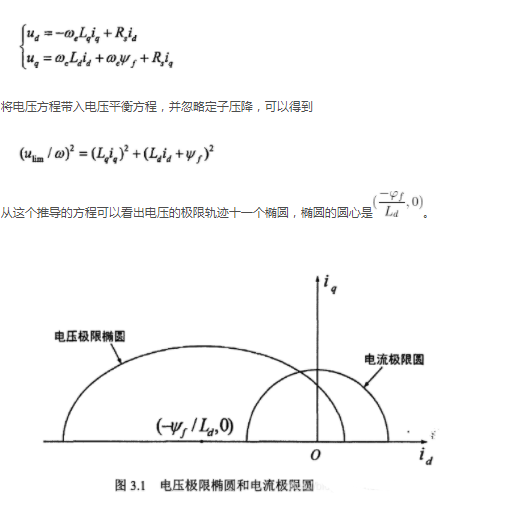
這里面有什么物理含義呢? 其實從圖中可以看出,要使電機穩定的運行,電壓必須處于這個電壓極限圓的曲線內,一旦超過電機將不穩定。
1.2 電壓流限環的概念
我們再來了解電流極限環的概念,永磁同步電機的電流極限可以用方程描述: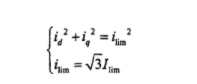
式中的 Ilim是電動機允許的最大相電流值。
有了這電流極限環的概念,我們再結合電壓極限環,我們可以知道,如果要使電機穩定運行,電流矢量的終點必須落在電流極限環和電壓極限環的圓之內,也就是電流矢量的終點必須落在電壓極限環和電流極限環的公共區域,否則電機將無法穩定運行。
2 如何實現弱磁擴速
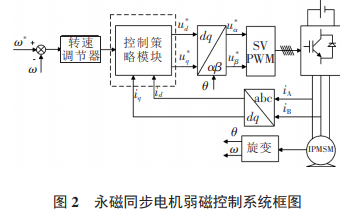
有了以上的概念,我們該如何在仿真中實現弱磁呢?采用雙電流調節器的超前角弱磁控制。
2.1 超前角是什么?
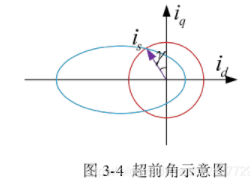
定義:超前角 為兩相旋轉坐標系dq坐標系下,定子電流矢量超前q軸的電角度。 如下圖所示
2.2 超前角弱磁的原理是什么?
當轉速達到轉折速度時,電流調節器仍然處于飽和狀態,定子電壓已經達到極限狀態。如果我們此時通過電壓反饋來調節超前角 在到達額定轉速后增大,直軸的去磁電流反向增大,交軸電流也隨之減小,隨著直軸去磁電流的增大,磁通減小。以此實現在不增加逆變器容量的情況下弱磁。
2.3 超前角控制框圖
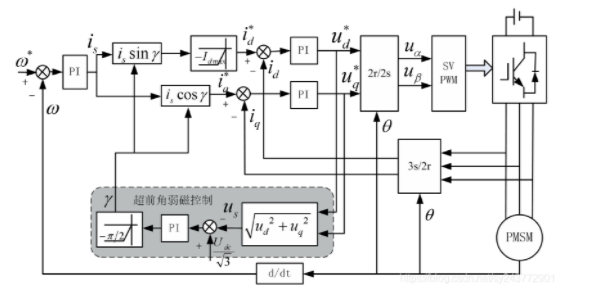
具體如何是現在simulink里面判斷是否達到額定轉速呢?
電流調節器的輸出 ud 和 uq 作為弱磁調節器的輸入量,并于逆變器所能輸出的最大電壓 Umax比較,二者的偏差作為弱磁環節的PI調節器的輸入,PI調節器輸出超前角來調節 iq 和 id 的給定。
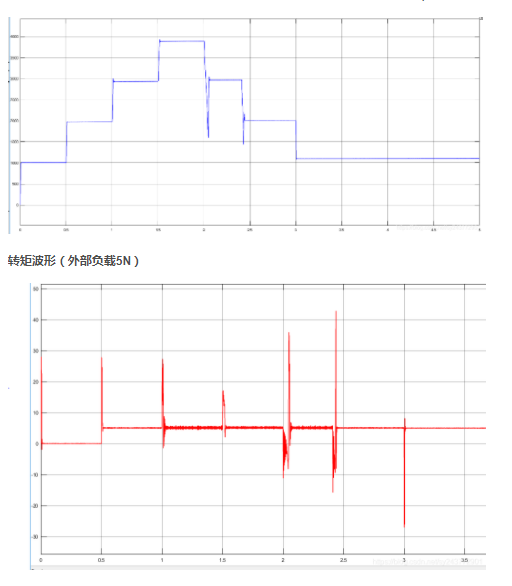
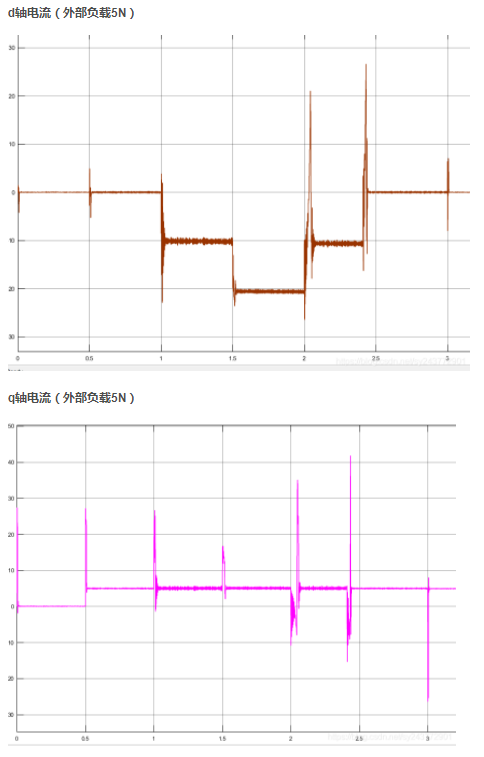
3,實驗結果分析
轉速波形 電機的額定轉速為2300,不加弱磁,超過2300之后電機直接跑飛了(0.5s 為1000,1s為2000,1.5s為3000以此類推)
小結:
超前角弱磁方式的特點在于結構簡單,易于實現,也較易于在實驗中實現,但是超前角弱磁,仍然存在弱磁電流過強導致去磁的風險,圖中波形雖然毛刺較小,但明顯有較大的超調,導致波形不夠好看,但基本實現了弱磁擴速,并且能夠帶載運行。模型還需要修改的地方很多。
編輯:hfy
-
電機控制
+關注
關注
3540文章
1896瀏覽量
269233 -
永磁同步電機
+關注
關注
28文章
874瀏覽量
49661
發布評論請先 登錄
相關推薦
永磁同步電機控制系列的數學模型(7):怎么解耦







 工商網監
工商網監
評論