 夜視應用的CMOS圖像傳感器的特性和說明
夜視應用的CMOS圖像傳感器的特性和說明
夜視技術市場涵蓋了廣泛的應用,主要目的在于給操作員提供視覺輔助分析。通常要求系統具有良好的便攜性以及低功耗。現代的夜視系統已數字化并帶有高端圖像處理功能,可以實現模糊場景分析。
1. 簡述
夜視技術市場涵蓋了廣泛的應用,主要目的在于給操作員提供視覺輔助分析。通常要求系統具有良好的便攜性以及低功耗。現代的夜視系統已數字化并帶有高端圖像處理功能,可以實現模糊場景分析。在這樣的要求下,圖像傳感器本身的性能就變得極其重要。理想狀況,極度低光照狀態下每一個光子都必須轉化為有效信號,從而最終圖像可以清晰分辨所有細節。本文章對主要用于評估低照度性能的傳感器關鍵參數、建模和度量法作出探討。
2. 傳感器特征
本文工作是基于Teledyne e2v一款用于低照度科研CMOS圖像傳感器(CIS),560萬像素分辨率(2440x2304)。其像素為6.5微米,支持全局快門跟卷簾快門模式,最大速度為88幀每秒。這一單芯片架構屬全數字并為非常低噪聲應用作出優化。這一CIS能夠在全速卷閘快門下實現亞電子時間噪聲,并在全局快門下實現5電子時間噪聲。
這一傳感器最初是基于標準CMOS工藝設計,然后轉移到特定的厚和高阻抗硅物料(HiRes)以實現從可見光到近紅外(NIR)更高靈敏度和良好的空間分辨率和更大的量子效率(QE)。像素的微透鏡以零縫隙(zero-gap)方法優化,實現最大80%的量子效率。專有的像素彩色馬賽克陣列或單色陣列,使得傳感器適用于日間和夜視應用。
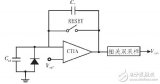
其它測試器件(DUT)的低亮度性能在表1中做了比較。
3. 低照度相機和傳感器設計
3.1. 噪聲水平
噪聲是由以下各因素構成:
- 讀出噪聲
- 暗散粒噪聲
- 光子散粒噪聲
- 量化噪聲
- 固定模式噪聲(FPN)
- 像素響應非一致性(PRNU)
而最后的兩個因素FPN 和 PRNU 在系統校準后不再出現,因而可以忽略。
在低輻照下,讀出和暗噪聲主導了信噪比(SNR),而光子散粒噪聲則在動態較高的位置有較大影響。要實現非常低光照水平下探測,噪聲的大小是關鍵因素。光子計數成像要求噪聲小于0.15 e-,這對于標準CMOS傳感器來說是很大的挑戰。特別對于一些像素內信號放大電晶管會產生隨機電報噪聲源(RTS),導致一些像素出現非典型的高讀出噪聲,使得它們不適用于低照度感測。對超低噪CMOS傳感器設計而言,像素噪聲是主導因素。換言之,模數轉換器(ADC)和混合信號讀出通道對于影像和視覺傳感器性能來說是至關重要的。能夠降低模擬讀出噪聲的設計方式之一,是去除取樣存放步驟(sample-and-hold),直接轉換輸出像素信號。我們之前的工作提出了一個基于兩級ADC的新型架構,能夠實現接近0.5電子噪聲 。它同時展示了像素設計的重要性,以及電晶管工作和ADC分辨率的影響。
量化噪聲最一種隨機模擬噪聲。模數轉換器(ADC)將來自CMOS傳感器的光電信號轉換成數字信號。這便關乎到具體信號估算的不確定性。量化步長或數字量化值的選擇必須能夠讓量化噪聲跟其它噪聲源相較可以忽略。量化數值以及它的不確定性取決于:1) 模擬信號的滿量程范圍(FSR)以及2)數字信號的位數(Nb)。算式1給出了量化噪聲的算法。
算式1
其中Nb越大,則量化噪聲越小。但相應地,也要求更大的存儲空間,在傳輸速率一定的情況下,也會帶來幀率的降低。因此,設計時,需兼顧幾方面。
3.2. 像素尺寸
像素的尺寸是圖像傳感器設計考慮的重要指標。小像素能夠顯著提高空間分辨率。另一方面,在相同光學孔徑和視場范圍條件下,大像素能夠帶來更高的靈敏度。鑒于圖像質量的概念是這兩個參數的結合,像素面積的折衷就成為必需事項。例如大像素有較高的響應并能夠改進夜視能力,但它的空間分辨率卻不足以辨別遠處離物體的細節。約翰遜準則(Johnson‘s criteria)被廣泛應用在距離性能預測。
3.3. 靈敏度改進趨勢
本工作設計方法在已有圖像傳感器設計基礎上加入新技術改進光電特性,且不影響其它性能。這一方法已經應用芯片設計且得到了驗證,成功實現產品系列擴充。最近在新的工作中,通過負偏置基極并增加芯片厚度(HiRho),提升量子效率和靈敏度,同時保持出色的空間分辨率。HiRho是短期被看好的改進靈敏度的方法,現在正技術驗證階段。根據傳感器特性建模仿真數據,可以預期應用HiRho技術芯片在低照度環境下表現性能優于其他芯片。
4. 低照度性能測量
信噪比和空間分辨率是評估圖像質量的兩個主要指標。相機制造技術能力也體現在對這兩個指標的良好把控。界定它們的參數包括量子效率、噪聲源、色彩還原度以及調制傳遞函數(MTF)。
噪聲等效輻照度(Noise Equivalent Irradiance,NEI),它反映了暗噪聲以及光響應的影響,如算式2所示:
算式2
圖像傳感器的響應度Rims取決于多個參數,如算式3所示:
算式3
從圖像傳感器角度, NEI主要取決于兩個主要參數,量子效率和噪聲。它們決定了生成基本影像所需的最低光照度的閾值。這一理論模型并沒有考慮到與光粒子性本質相關的散粒噪聲。散粒噪聲遵從泊松分布,它的標準偏差為產生的信號的平方根,以電子為單位。因此,需結合考慮NEI和信噪比(SNR)。ISO 12232 標準定義了基于SNR的圖像質量條件。標準給出了SNR值與輻照度水平的對應關系指標。指標的值愈小,傳感器的性能愈佳。在實際使用中,SNR10公認為可接受的圖像,SNR40為完美影像。對于低照度成像而言,一般認為SNR = 10 dB 的圖像是可用水平。
獲得SNR=X所需場景的輻照度Escene可通過算式4得出。
算式4
空間分辨能力的分析與時域信號噪聲分析同等重要。基于約翰遜準則的最小可分辨對比度(Minimum Resolvable Contrast,MRC)是常用的空間分辨能力衡量方法。相較于NEI,它更復雜一些。因為它是基于具代表性的工作條件下的測試結果,且受到觀察者主觀感受隨機性影響。
基于上述方法,比較不同傳感器的性能是可能的。
5. 傳感器性能對比實驗
5.1. TTP 計量
在1950年后期提出的約翰遜準則(Johnson criteria)經常被引用界定夜視系統性能。根據理論,我們可以得到不同輻照水平下傳感器的最高空間分辨率fj。最小可分辨對比度(MRC)相當于分辨某個頻率所需的對比度閾值。因此我們也能得到給定距離范圍內,對于某一對像的偵測、辨識和識別(DRI)的機率計算。現場測試結果常常顯示出與準則有差異的結果,特別是數字傳感器和顯示器。因而衍生出多個其它方法。其中任務性能目標(Targeting Task Performance,TTP) 方法結合了約翰遜方法和取樣圖像(或視頻)與諸如銳利化或對比修正等數字圖像處理等因素。另外,為了反映操作者主觀因素,TTP模型也加入了視覺的對比限制。這就是本工作中選用的方法。
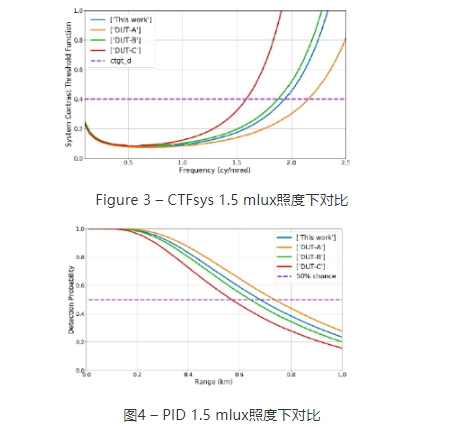
對比閾值函數(Contrast Threshold Function,CTF) 是考慮人類視覺特征的函數。CTFsyst也采用了同一概念,通過圖像來顯示傳感器在不同光照度水平下的空間分辨率、光學模糊度(MTF)和噪聲。CTFsyst的曲線呈浴缸形,人眼對低頻變化對比度敏感,但對小圖案的空間分辨率則靈敏度受限。
TTP 的計算是在頻域,對比目標背景對比度(Ctgt)和CTFsyst。截止頻率為Ctgt開始超過CTFsyst的頻率,即fj。低頻接近于零。算式 5 定義了TTP 的計量。
算式5
對一個給定范圍,且已知目標范圍ATGT,可分辨周期數Nresolved可通過算式6定義。
算式6
在算式7中,系數E由一個相當于0.5完成任務機率的經驗實現參數V50而得出:
算式7
其中V50 = 18.8。
由算式 5 到算式7,我們得到每個范圍TTP的準確概率函數(Pid)機率函數:
算式8
我們把TTP 計量設置到Python 環境,以演示出CMOS圖像傳感器的性能對比。
5.2. 光學工作臺設定
TTP方法一般都是基于反射型目標,而在實驗室環境不容易實現。我們特別依照測試目的,設計了一個緊湊型光學工作臺。這個工作臺配備一個用于配接任何相機和卡的機械接口。機箱內置有標準透射型分辨率測試卡(USAF 1951),帶通濾波片或中性濾波片。積分球內配置有校準過的輻照度監測儀。工作平臺封閉不透光,可以抵抗外界環境光 (》 100 lx)干擾,并能夠保持腔內輻照度小于10 μlx。腔內部使用了特殊涂料,內壁350nm-1100 nm的光譜范圍內殘留反射率小于5%。所有量度均使用Kowa telephoto高分辨率50 mm焦距c-mount鏡頭。
圖1 – TTP光學工作臺
6. 結果與討論
圖2到圖4為基于TTP技術在1.5 mlx 輻照度下(night level 4)的對比結果。可以看到像素尺寸,噪聲和信噪比帶來的影響。這一組圖片與USAF 1951在低亮度工作臺拍攝的目標圖片呈現了一致的結果。
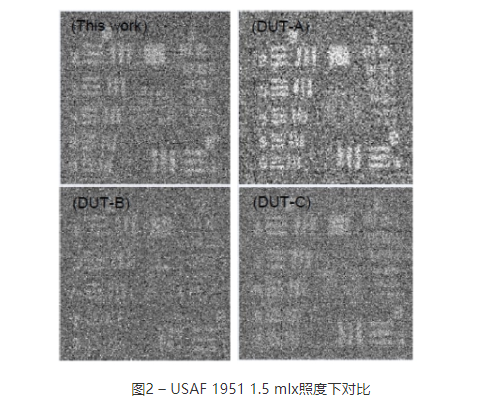
圖2 – USAF 1951 1.5 mlx照度下對比
我們簡化了計算模型,Ctgt 的計算剔除了大氣吸收,采用了簡化的噪聲模型。Ctgt 取固定值0.4。由于對比是以Pid曲線為基礎,我們簡化CTFsyst,假定顯示器是完美的,不帶有任何對比度增強且其空間頻率噪聲考慮為白噪聲。雖然計算的范圍數值相較于現場數據更理想化,但是它已足夠用于比較不同傳感器的表現。表1 給出了新型器件的參數比較。由于使用了高靈敏度的像素和低噪聲讀出,本文工作顯示了比其他像素尺寸相近產品更好的性能。而像素尺寸越大的芯片,表現出更好的SNR和NEI,在遠距離探測保證更好的探測可靠性。本研究器件的性能與其它當前高水平芯片對比,表現出相近的性能水平。
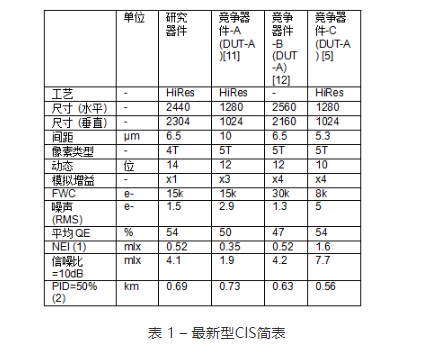
表 1 – 最新型CIS簡表
7. 結論與未來工作
本文為前期提出的傳感器優化方法論的延伸工作,應用于夜視芯片優化。提出了實驗室測量對比夜視芯技術方法,并以此方法對比驗證了本工作夜視傳感器與現有其他芯片性能進行比較。在1.5 mlx照度下得出的結果與NEI和SNR的計算一致。由于近紅外產生電子擴散更明顯,所有測試傳感器均出現對比度下降和空間分辨率的損失。要實現長距離目標探測識別(DRI)需要新一代的傳感器具有更好的光電性能。值得一提的是HiRho工藝開啟了新的技術領域。深耗盡區(full deep depletion)工藝將實現更接近理論值的對比度分辨率以及顯著改進的QE。例如具有6.5 μm 像素的Teledyne e2v 科學CMOS圖像傳感器,在夜視等級4 (night level 4)環境下,探測范圍增加至1.2倍, 甚至超越了對比測試中表現最好的競爭器件A。
責任編輯 LK
-
傳感器
+關注
關注
2552文章
51366瀏覽量
755730 -
CMOS
+關注
關注
58文章
5734瀏覽量
235887 -
adc
+關注
關注
99文章
6532瀏覽量
545420
發布評論請先 登錄
相關推薦
CCD和CMOS圖像傳感器的比較
CMOS圖像傳感器簡議
新型CMOS圖像傳感器設計
IBM進軍CMOS圖像傳感器
CMOS圖像傳感器的原理參數和CCD圖像傳感器有什么區別等資料概述
cmos圖像傳感器結構_cmos圖像傳感器市場





 工商網監
工商網監
評論