 基于DSP技術和USB通信技術相結合實現數據采集系統的設計
基于DSP技術和USB通信技術相結合實現數據采集系統的設計
(文章來源:單片機與嵌入式系統應用,作者:詹慶才;吳命利;曹篤峰;許楊)
如今,數據采集系統很多,有基于數字信號處理器DSP設計的,也有基于現場可編程門陣列FPGA設計的,這些采集系統盡管采集處理數據能力不差,但大多都采用傳統授時模式。
而異地同步測量是工程中經常用到的方法,如果用傳統的授時模式,其時鐘頻率的產生是用晶體,而晶體會老化,易受外界環境變化及長期的精度漂移影響,造成授時精度下降,這樣異地同步測量的數據其實在理論上已經不再同步、同時了。本系統采用GPS新型授時方法,結合DSP技術和USB通信技術設計的數據采集系統能較好地解決這個問題。
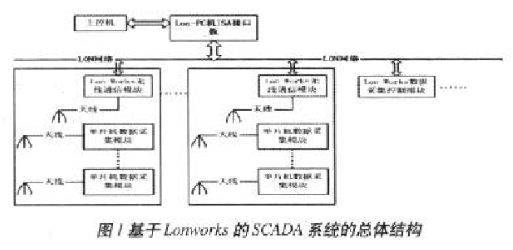
1 數據采集系統的總體硬件構成與工作原理
數據采集系統模擬量輸人、同步采樣控制、A/D轉換以及微處理器和接口組成,如圖1所示。

模擬量輸入部分設有多個通道(如16路),可用來對若干路電壓和若干路電流同時測量。來自PT或CT副邊的電壓或電流,經隔離變換、模擬低通濾波后,被建立在GPS時間基準上的同步采樣系統所采樣,經依次A/D轉換后按順序放入固定RAM區。DSP根據遞歸DFT算法,每來一個新的采樣點計算一次所有被測量的各相基波分量,然后利用GPS接收器串口提供的時間信息和數據窗第一個采樣點的順序編號,給計算結果置以便于識別的“時間標簽”。計算得出的各相量連同其時間標簽按照一定的數據格式,經過DSP總線和USB2.0數據線送往PC上位機進行處理和分析。
2 基于GPS授時的同步采樣控制單元
同步采樣是實現異地同步測量的關鍵技術,只有各測量點的采樣是同步進行的,同一時刻計算出的相量具有統一的參考時問基準,其相位關系才可直接進行比較。本文討論了無線電廣播、LORANC、OMEGS、GOES、GLO-NASS、GPS這六種不同的授時方法。這些授時方法的誤差比較如表1所列。
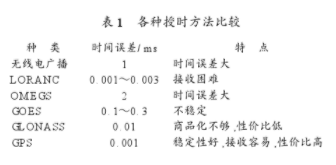
通過比較不難看出,傳統的時鐘同步方法由于受技術和經濟等因素的影響,在精度和實用性上很難滿足異地同步測量的要求;只有GPS精密授時方法的優越性能滿足要求。為此,本文所介紹的是一種基于GPS時間信號的最新時鐘同步方法。
2.1 GPS系統簡介
GPS(Global Positioing System,全球定位系統)是美國研制的第二代衛星導航系統。GPS系統由空間部分、地面控制部分和用戶設備組成。空間部分主要由21顆工作衛星和3顆備用衛星組成。在地球的任意處(有360°的視野)至少可以看到3顆衛星(根據筆者實際用的情況看)。地面控制部分包括監測站、主控站和注入站。用戶設備就是GPS接收機,本系統所選擇的接收機是GPS-OEM板(型號是GPS15L,在2.3小節會詳細討論),它根據自己時鐘和接收到的導航電文計算出接收機(天線)所在的位置和GPS時間。
2.2 GPS授時原理
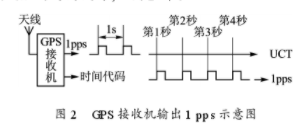
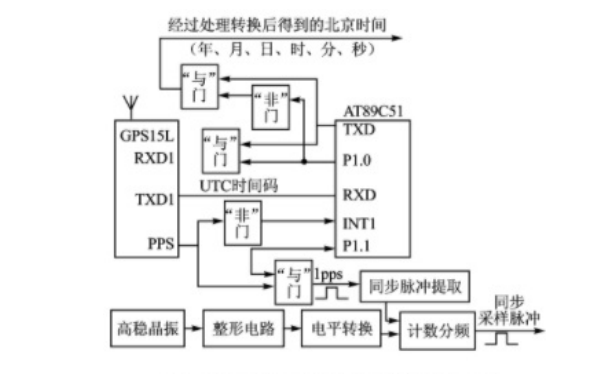
目前的定時型GPS接收機,在其內部時鐘與GPS時間同步后,將給出與UCT時間同步的1 pps(秒脈沖)信號及其對應的時間代碼,如圖2所示。
2.3 同步采樣控制單元硬件
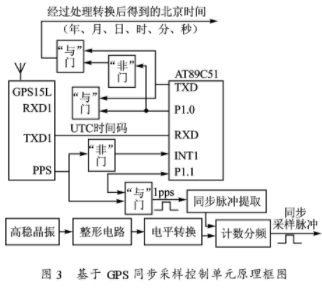
在設計該模塊時,選擇Garmin 公司研制開發的GPS15L OEM板和單片機AT89C51分別作為GPS接收機和控制器。該模塊體現了整個系統要用到的GPS授時技術,工作原理如下:系統上電復位后,單片機通過串口TXD實現對GPS15L板初始化,設置GPS接收機傳送的數據格式。初始化完畢后,GPS15L板會給出相應信息,單片機識別到這些信息后,開始接收GPS15L板傳送來的時間數據,并對它進行處理,將其轉換成北京時間輸出。如圖3所示,單片機AT89C51的串行口RXD、TXD分別和 GPS15L板的TXD1、RXD1連接起通信作用。由于TXD既要在上電時給GPS15L板發出初始化命令,又要在初始化完畢后傳送北京時間,因此為了不使兩階段的工作相互影響,用P1.0口線和若干邏輯門來控制通信的先后順序。GPS15L板初始化后,還會輸出秒脈沖信號。1pps信號有一路作為單片機的外部中斷源,以實現時間信息的同步處理,另外也用來監測信號是否正常。還有一路信號可由單片機P1.1口進行控制,根據監測的結果決定是否需要將其傳送給下一級控制器。
另外,本電路選用的高穩晶振是OCXO型號的穩補晶體振蕩器,其工作頻率為1 MHz,頻差不大于10-7。它輸出的振蕩信號經過整形、電平轉換變為適合TTL電路的電平,經計數器分頻后得到滿足采樣率要求的時鐘信號(采樣率可調)。該時鐘信號每隔1 s被1 pps信號的上升沿同步1次,使之運行在GPS時間基準上。由于1 MHz晶振的穩定度很高,1 s內漂移不超過1μs,因此得到的同步采樣脈沖精度很高。
3 ADC與DSP的接口部分
DSP芯片采用美國德州儀器(Texas Instruments)公司研制的數字信號處理器TMS320F2812。它是一個32位定點運算、集成度高、性價比高的DSP芯片。
數據采集系統選用ADS8361作為片外ADC模塊,雖然TMS320F2812有16通道的12位ADC,但是為了進一步提高系統的A/D轉換精度,增加了片外外設ADS8361。ADS8361是2+2通道,16位的A/D轉換器;它同ADS7861(12位)完全兼容,可以與F2812數字信號處理器直接接口使用。它是由四通道差分輸入分成兩組分別連接到獨立的轉換器上的,可以完成雙信號的同時采集,最高轉換速率可以達到500 kHz。它工作在50 kHz頻率時具有極強的抗干擾能力,特別適合數據采集的高采樣率要求的場合。此外,ADS8361還提供高速雙串行接口,可以有效地減少軟件開銷,并且功耗非常低,只有150 mW。
3.1 ADS8361與TMS320F2812接口電路設計
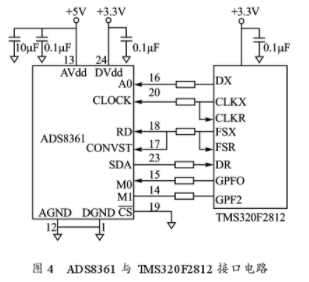
TMS320F2812處理器提供多通道緩沖串口(McBSP)和串行外設接口(SPI),兩種串口都可以與ADS8361接口。根據設計的需要,本系統采用的是McBSP的接口擴展方式。在ADS8361與TMS320F2812的接口硬件設計時,為避免數據信號產生振鈴,特意考慮在DSP與 ADS8361之間增加吸收電阻。由于TMS320F2812只有一個McBSP接口,因此必須將ADS8361設置在模式2和模式4。 TMS320F2812與ADS8361的硬件接口電路如圖4所示,ADS8361的CLOCK、(RD+CONVST)和SDA引腳分別連接到 McBSP的CLKX、(FSX+FSR)和DR引腳。由于McBSP上只連接一個A/D轉換芯片,片選信號(CS)直接接地,如果需要擴展多個A/D轉換芯片,則可以采用GPIO控制片選信號;同時使用通用I/O控制ADS8361的工作模式,使M0=0,M1=1;DX控制ADS8361的通道選擇。
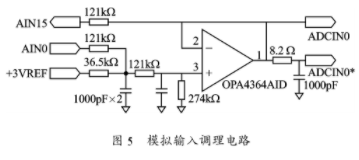
3.2 模擬輸入信號調理電路的設計
電力系統的相電流和相電壓分別經過CT和PT變換后,輸出為標準±10 V的模擬電壓信號。此模擬電壓信號需要經過前端的低通濾波器,濾除不必要的高頻噪聲信號,以及將模擬輸入信號范圍由±10 V變換成后端A/D所能接受的信號范圍。每一路的模擬調理電路如圖5所示。
4 USB接口通信電路部分
通信電路采用USB接口,USB接口芯片選用Cypress公司的CY7C68001。CY7C68001與TMS320F2812的連接電路如圖6所示。
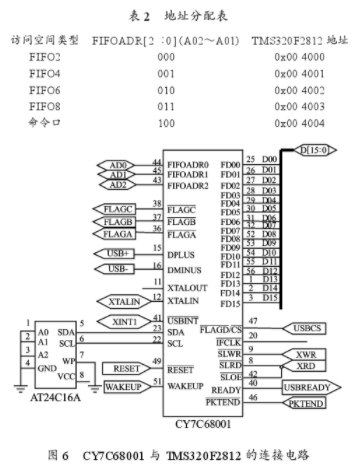
CY7C68001作為TMS320F2812的外設,采用異步存儲器接口與TMS320F2812相連接,上位PC機可以喚醒CY7C68001,也可以配置USB芯片。USBCS是CY7C68001的片選信號線,在USBCS為低電平時,CY7C68001采用異步讀寫方式完成二者之間的數據和命令的交換。
CY7C68001有兩種對外接口,分別是FIFO數據接口和命令口。數據采集系統將這兩種對外接口配置在地址范圍是0x004000~0x004004 的空間,分配如表2所列。TMS320F2812通過CY7C68001的FIFO數據接口可以訪問4個1 KB的FIFO中的數據,而FIFO數據接口的選擇是通過控制地址線A[2:0]來實現的。當TMS320F2812的地址線A[2:0]為100B時,選中CY7C68001的命令口,然后通過命令口可以訪問37個寄存器、Endpoint0緩沖器(64字節FIFO)和描述表(500字節FIFO)等。如果將Endpoint0緩沖器和描述表也看成寄存器,那么單個命令口內含了眾多的寄存器,對這些寄存器進行讀/寫訪問采用二次尋址方式,即首先通過命令口將要尋址的寄存器子地址和操作類型(讀操作或寫操作)寫入,然后再通過命令口將數據讀出或寫入相應的寄存器。
CY7C68001還有一個中斷信號USBINT和4個狀態信號(USBREADY、FLAGA、FLAGB、和FLAGC)。中斷信號USBINT占用 TMS320F2812的外部中斷XINT1,狀態信號USBREADY、FLAGA、FLAGB和FLAGC配置在另一個擴展的寄存器中, TMS320F2812可對其進行查詢,從而得到USB的狀態。USB芯片的WAKEUP也配置在另一個擴展的寄存器中,TMS320F2812通過對這個寄存器的寫操作達到喚醒USB的目的。
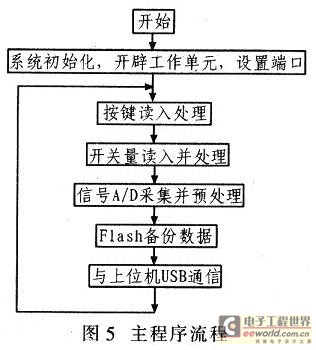
5 系統的軟件部分
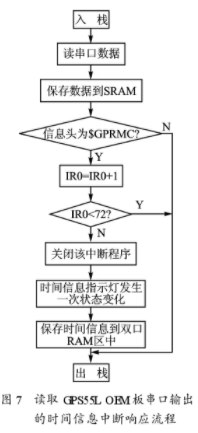
系統的軟件部分包括主程序和各中斷程序以及系統與上位PC機的USB通信程序。主程序完成各變量及串行口的初始化,并利用傅里葉變換算法計算出各采樣點的實部和虛部。中斷程序包括A/D轉換程序、GPS時間信息的讀取程序等。本文重點介紹用于讀取GPS接收器串口輸出的中斷響應程序的設計思路,程序流程如圖7所示。
6 電源設計
電源電路采用降額設計,并采用高精度電源電路,可保證供電系統的可靠性。
① ADS8361的內部參考電源為+2.5 V。
② GPS15L OEM板的供電電壓為3.3~5.4 V,GPS接收天線的供電電壓為3.0 V。
③ TMS320F2812要求雙電源(1.9 V和3.3 V)為CPU、Flash、ROM、ADC和I/O接口供電。
當上電時,為了保證芯片內各個模塊的正確復位,TMS320F2812供電需要滿足一定的時序。該系統先給所有+3.3 V的電源引腳(VDDIO、VDD3VFL、VDDA1、VDDA2、VDDREF)上電,再接通1.9 V(VDD、VDD1)的芯片內核電源;當VDDIO的電壓上升到2.5 V時,VDD才上升到0.3 V,這樣才能保證片內各個模塊上電時能正確復位。掉電時,在VDD下降到1.5 V之前,系統復位。這樣才能保證在VDD、VDDIO掉電之前片內Flash模塊正確復位。該系統設計中,選用TI公司提供的雙電源輸出、Low- Dropout型電源TPS76801QDR來給TMS320F2812供電,實現上述的供電時序。
結 語
本數據采集系統為四通道,A/D轉換精度為16位,轉換精度高并且抗干擾能力極強,通過USB能夠實時海量傳輸所采集到的數據。另外最重要的是,用GPS 授時模式代替傳統授時模式,特別適合需要異地同步采集的場合。例如:在高速電氣化鐵道電氣參數參量中,為了能夠同步獲得列車電流、位置以及鋼軌電位、鋼軌電流、吸上線電流,只需要在列車上和鋼軌地面兩個測量點同時使用同樣的數據采集系統,這樣測得的相量數據就有統一的時間基準,便于科學地分析這些參數。
責任編輯:gt
-
dsp
+關注
關注
554文章
8059瀏覽量
349857 -
usb
+關注
關注
60文章
7979瀏覽量
265568 -
數據采集
+關注
關注
39文章
6245瀏覽量
113914
發布評論請先 登錄
相關推薦
基于USB數據采集系統的研究與設計--ResearchandDesignofDataAequisitio
基于DSP和現場總線的數據采集系統設計
【數據采集分享】基于LABVIEW的USB接口高速數據采集的設計
LabVIEW軟件技術應用
基于USB3.0技術和FPGA器件實現多串口數據采集與傳輸系統的設計
基于Lonworks技術和無線通信技術實現數據采集與監控系統的設計
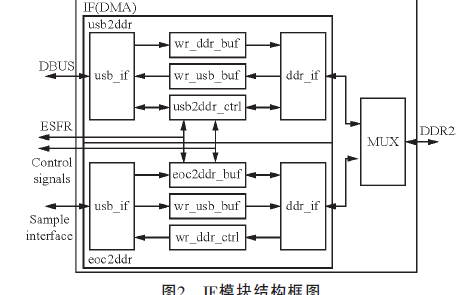
如何使用USB2.0和DDR2進行數據采集系統設計與FPGA實現資料概述
如何使用DSP和USB通信技術實現數據采集系統的設計
基于FPGA的高速數據采集系統該怎么設計?






 工商網監
工商網監
評論