 dfrobot牛眼輪 萬向輪簡介
dfrobot牛眼輪 萬向輪簡介



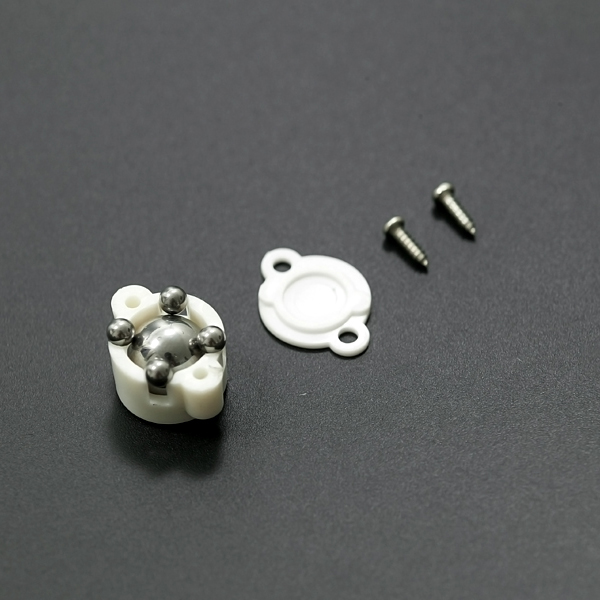
簡介
牛眼萬向輪,整體是由1mm厚的鋼板在機床上沖壓而成,載重可達15KG。
內置大鋼珠周圍有多達40顆小鋼珠環繞,使主滾動鋼珠轉動更為流暢。
合理的結構設計以及精湛的加工工藝使配有此牛眼萬向輪的機器人的運動更加靈活自如。
技術規格- 固定孔直徑:4mm
- 固定孔位中心距:40mm
- 輪體總高度:20mm
- 牛眼鋼珠凸出高度:4mm
- 牛眼鋼珠直徑:15mm
- 滑動小鋼珠個數:40顆
- 最大載重:15KG
- 重量: 37g
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
嵌入式主板
+關注
關注
7文章
6086瀏覽量
35529 -
DFRobot
+關注
關注
4文章
1159瀏覽量
9628
發布評論請先 登錄
相關推薦
求給一個測量直流電機轉速的程序
求給一個測量直流電機轉速的程序,可以同時測量2個的,因為是三輪小車,前面萬向輪,如果誰有的話,又剛好看到帖子的話,希望你可以給我看看,謝謝!最后問一下如何讓小車保持直線行駛,直流電機的小車。謝謝!
發表于 08-23 18:37
最近做了一個51智能小車,有沒有做過一起進來的討論一下?
我的小車是三輪那種,唯一有些不同的是我把別人那個萬向輪做成了由舵機控制的了,所以感覺IO口有些不夠用啊,現在只能同時進行避障+調速,或者是舵機控制萬向輪+避障、不知道怎么處理這種事情?上圖!
發表于 11-30 12:00
三輪循跡小車
用51控制一個三輪循跡小車,采用五路光電檢測,還有一個輪子是萬向輪,現在調節占空比是小車能夠實現循跡,可是在走直線的時候,車子總是繞著黑線左右擺,請問有什么好的程序控制方法?
發表于 11-01 20:48
兩輪+一個萬向輪的避障小車,如何調整平穩性
最近在弄避障小車,兩輪+一個萬向輪的那種小車底盤,現在小車運行不能走直線,走著走著就偏了,還有左右轉也轉得不太好,如何調整呢,各位指點指點?下面是實物圖
發表于 01-12 14:06
智能車的疑問
我們知道循跡小車可以沿著設置的跑到走,如果將跑到設置成直線就可以直走,我想問的是,如果做一個兩輪驅動后邊加有一個萬向輪的有避障功能無尋跡功能的小車如果保證小車能走直線?
發表于 05-09 04:04
【KittenBot機器人試用體驗】KittenBot小車組裝
。kittenbot套件完整不用另外購買零件,還很貼心的配備了一把螺絲刀,是初學者的佳選。小車機身由金屬打造,不怕摔,給小學生學習是再合適不過了。第一步——安裝電機,輪子以及萬向輪左電機右電機左輪右輪后萬向輪前
發表于 07-15 19:20
arduino光電循跡搬運小車該用四輪車嗎?
第一次做小車,想做一個可以循跡,可以分辨顏色把貨物搬到對應顏色區域的小車 該用四輪車還是三輪其中一個是萬向輪的車 循跡模塊用TCRT5000紅外反射傳感器可以嗎如果不行的話,有什么更好的推薦嗎 最重要的是用什么讓小車分辨顏色還沒
發表于 09-25 22:47
移動機器人底盤主要包含哪些設備
。也有底盤不用底盤控制器,電腦直接控制電機驅動器,構成最簡單的機器人底盤。一、差動底盤差動底盤主要由兩個直流電機、前后兩個萬向輪構成。萬向輪采用減震設計,保證四個輪子同時接地,避免出現打滑現象。V=(Vr+Vl)/2 左右輪的速
發表于 09-07 06:15
智能小車PCB底板的相關資料推薦
說起亞克力板智能小車,大家肯定都見過,用過三輪式兩個前驅動輪,加一個后萬向輪,通過兩前驅動輪差速進行轉向,比如左輪前進,右輪停止或者后退,則進行右轉彎,萬向輪的存在,使得轉向平滑。優點
發表于 01-19 07:58
基于RT-Thread+RA6M4的麥輪結構的底盤運動控制系統設計案例
,使其驅動4個麥輪的電機。其地盤可實現全向移動,即平面的縱向,橫向移動和原地的旋轉移動。應用背景在目前移動機器人開發中,除了仿生結構的機器人之外,麥輪結構的移動機器人和萬向輪結構的移動機器人使用頻率也
發表于 08-17 14:50
dfrobot3PI miniQ 小車萬向輪簡介
這款MiniQ機器人專用鋼珠輪采用白色ABS塑料外殼、直接0.375英寸(0.9525cm)鋼珠、兩片墊片(0.158cm和0.125cm厚)和兩個2號螺紋孔。在不加入墊片的情況下,鋼珠輪的高度為1.016cm。用戶也可以加上墊片來增加高度。這款鋼珠





 工商網監
工商網監
評論