 Domino建筑機器的分步制作
Domino建筑機器的分步制作
步驟1:機箱,支撐構件和導向方式
計算所需零件的所有尺寸,并如圖所示繪制在日光板上。
第1部分:A長底盤的設計可支持所有其他零件,電機和機械裝置。
第2部分:是機械的頂部支撐,最終粘在背面支撐上。
第3部分:背面支撐在單一方向上引導機械。
第4部分:第2部分是機械桿的導軌,因為該機械由兩個組成,并且在給定的路徑中往復運動。
第5部分:此支撐構件的一端連接到第2部分,另一端連接到第6部分。提示:安裝第5部分時,請注意多米諾骨牌向外移動的距離。
第6部分:
步驟2:帶電動機的主推動機構。
主要機構由適當尺寸的太陽板和一個槽組成,通過槽將電動機的旋轉運動轉換為平移運動。
A紅色軸是3D打印的,并附有電動機軸。一根吸管的一端固定在紅色軸上,另一端固定在機構的插槽中,如圖所示。
步驟3:降低機器人速度
為了平穩地應用將多米諾骨牌從機器人中推出的主要機構,主要現象是通過增加電機軸的負載來降低機器人速度。橡皮筋附著在電機軸上,這最終會增加電機軸上的負載并降低速度。附件如上圖所示。
步驟4:WITBLOX套件
WITBLOX套件包括電機每個電機的驅動器和一個電源驅動器和電池。每個組件的連接非常簡單。電池連接到電源塊,電源塊連接到電機驅動器。每個電機驅動器均連接到相應的電機。您可以在WITBLOX或WITBLOX應用程序上購買這些東西。兩個電機,一端帶輪,另一側帶腳輪。從視頻到視頻,從第1部分到第6部分的所有其他部分均已安裝機械裝置,并對機器人進行了出色的測試。
責任編輯:wv
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
驅動器
+關注
關注
53文章
8271瀏覽量
146893 -
電動機
+關注
關注
75文章
4128瀏覽量
96887
發布評論請先 登錄
相關推薦
建筑能耗監測對既有建筑節能的研究
摘 要:在建筑能耗監測技術的基礎上,融合建筑能源審計技術性和工程建筑能耗等級評價技術,研究現有建筑的能耗,明確提出節能改造計劃方案。在未來,該研究思路還可以運用于我國既有
建筑能耗監測對建筑節能的研究
摘要:基于建筑能耗監測技術,融合建筑能源審計技術與工程建筑能耗等級評價技術,研究既有建筑能耗,提出節能改造方案。該研究思路可應用于我國既有建筑
建筑能耗監測系統方案
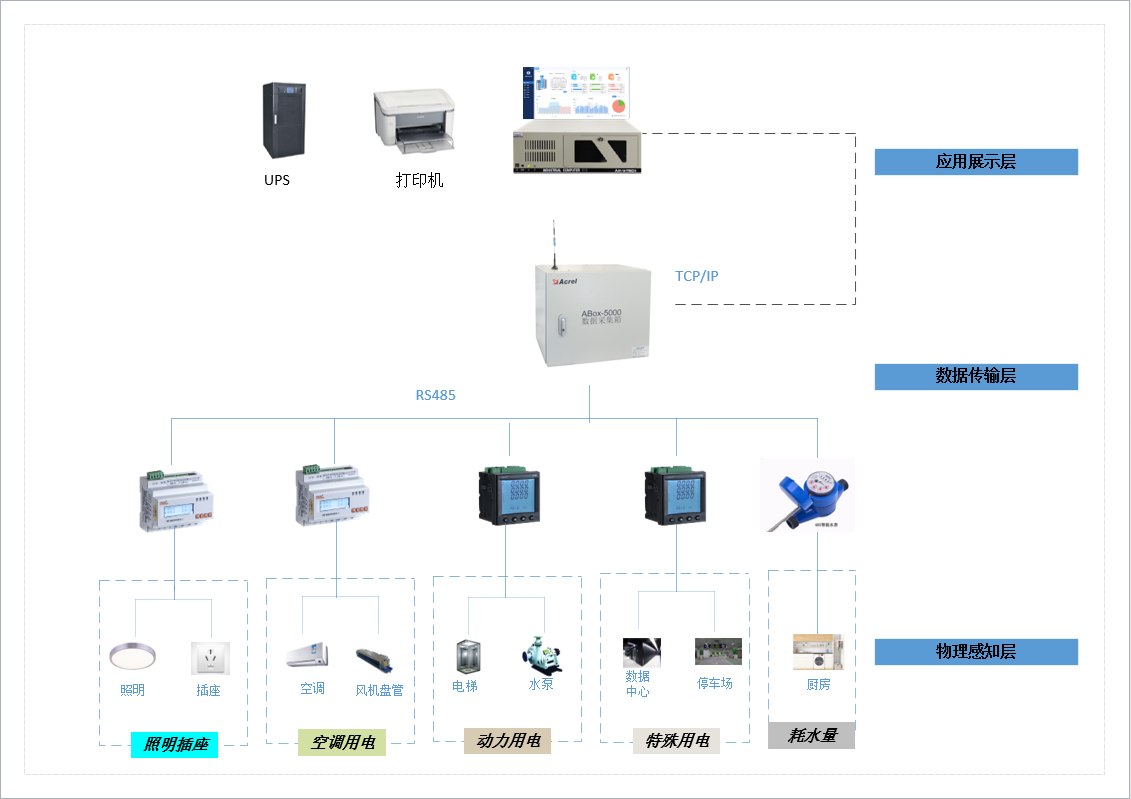
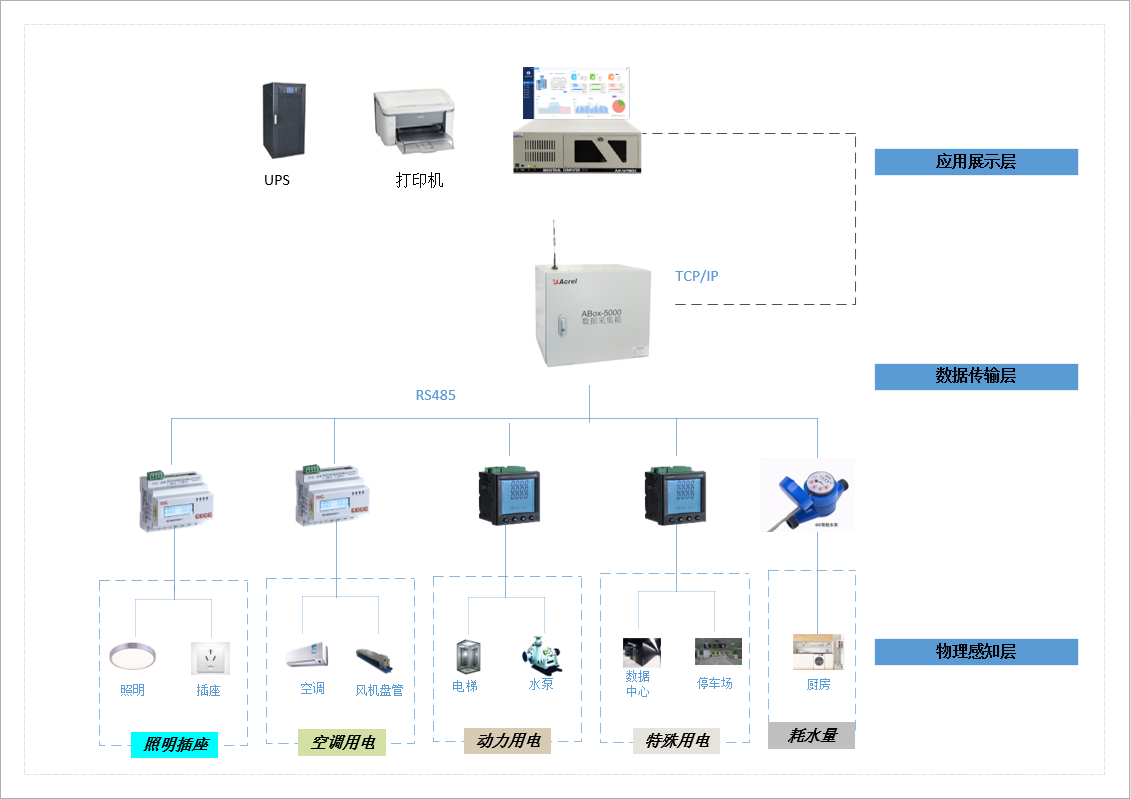
隨著全球能源危機日益嚴峻,與環境保護意識的不斷增強,建筑能耗監測系統方案成為實現節能減排、推動綠色建筑發展的重要手段,是現代建筑管理的重要工具。 建筑能耗監測系統方案是集現代信息技術、
建筑能耗監測對既有建筑節能的研究分析
摘 要: 在建筑能耗監測技術的基礎上,融合建筑能源審計技術性和工程建筑能耗等級評價技術,研究現有建筑的能耗,明確提出節能改造計劃方案。在未來,該研究思路還可以運用于我國既有
Han Domino RJ45模塊
Han-Modular? Domino 產品組合的新亮點即將推出 - Domino RJ45 模塊! Domino 系列主要滿足行業對節省安裝空間和重量的要求。例如,Domino 模塊
發表于 10-09 18:32
?266次閱讀

開源項目!用ESP32做一個可愛的無用機器人
簡介
作者在完成碩士論文答辯后,利用空閑時間制作了一個他一直想做的機器人——可愛無用機器人。
無用機器人原理是一個連接到開關的電機,通過邏輯門控制。當開關被推到“開”時,
發表于 09-03 09:34
開源項目!用ESP32做一個可愛的無用機器人
簡介
作者在完成碩士論文答辯后,利用空閑時間制作了一個他一直想做的機器人——可愛無用機器人。
無用機器人原理是一個連接到開關的電機,通過邏輯門控制。當開關被推到“開”時,
發表于 08-30 14:50

智能建筑虛擬仿真技術:未來智能建筑的關鍵
智能建筑虛擬仿真技術作為智能建筑和建筑領域的重要創新,正在推動未來智能建筑改革的趨勢。它不僅將傳統的建筑監控系統圖帶入了一個新的時代,也為智
建筑智能控制系統的特點
建筑智能控制系統 (Building Automation System,簡稱BAS)是利用先進的信息技術、通信技術和控制技術,對建筑內的設備、系統進行集成管理和控制的系統。它的出現極大地提高了
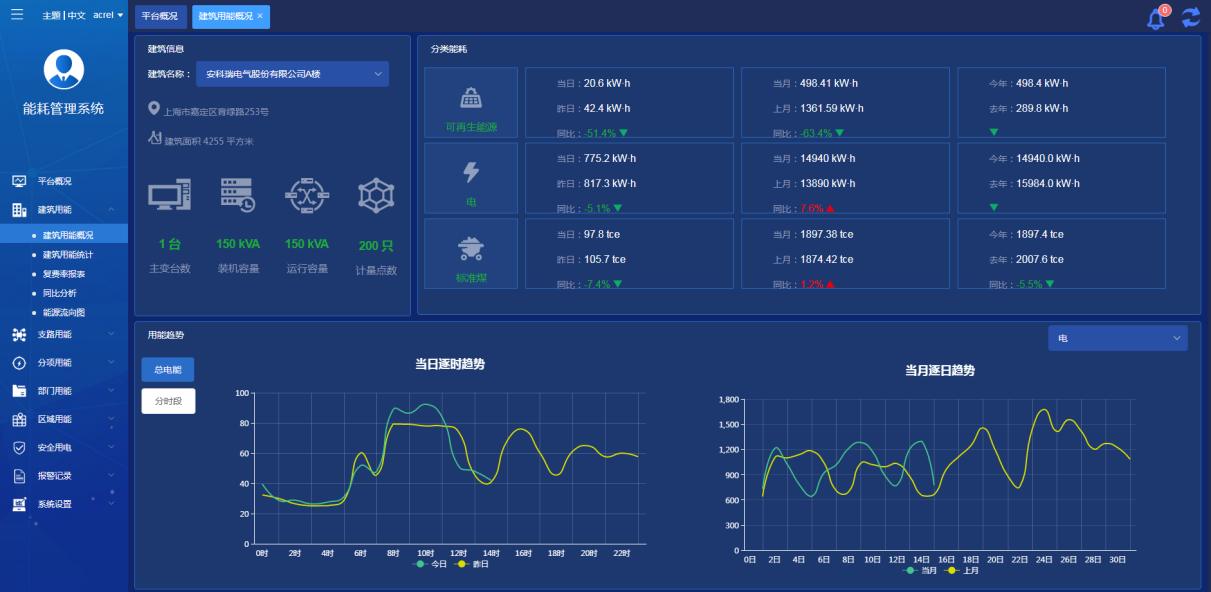
淺談某辦公建筑的建筑能耗管理系統設計及分析
程瑜 江蘇安科瑞電器制造有限公司 江蘇江陰 214405 摘要 :本文針對某大型辦公建筑項目,將建筑群內部的所有能耗數據和參數,傳輸至建筑能耗管理平臺,由能耗管理平臺進行數據統計、分析和處理后,反饋

建筑自動控制系統-實現舒適、節能的雙重目標
建筑自動控制作為建筑設備的智能管理系統,在當今智能建筑領域發揮著越來越重要的作用。實現舒適節能的雙重目標,為人們創造更宜居、更環保的建筑環境
智慧建筑——智能、高效、舒適的生活環境
建筑自動控制作為建筑設備的智能管理系統,在當今智能建筑領域發揮著越來越重要的作用。實現舒適節能的雙重目標,為人們創造更宜居、更環保的建筑環境
中國建筑學會建筑電氣分會2024年學術年會
人間四月天,鳥語花香柳如煙。安科瑞與來自全國的業界同仁邂逅美麗春日,共聚武漢,赴中國建筑學會建筑電氣分會2024年年度盛會,碰撞思想火花,掀起頭腦風暴,歡慶建筑電氣分會成立40周年。會議由中國

ICON發布一套新型建筑3D打印硬件、軟件和材料
2024年3月,先進建筑公司ICON 發布了一套可實現建筑自動化的新產品和技術,包括能夠實現多層建筑的全新機器人打印機、新型低碳建筑材料、包





 工商網監
工商網監
評論