") 自動貓喂食器的制作教程
自動貓喂食器的制作教程
步驟1:材料
-Arduino 101
-超聲波傳感器HC-SR04
-電動機(jī)驅(qū)動器1A Dual TB6612FNG
-LM7806
-3D打印零件
-齒輪電動機(jī)DG01。
-通用6v直流電動機(jī)
-內(nèi)置金屬框架。
-塑料容器
-硅酮膠
-電線
步驟2:直流電動機(jī)驅(qū)動器組件
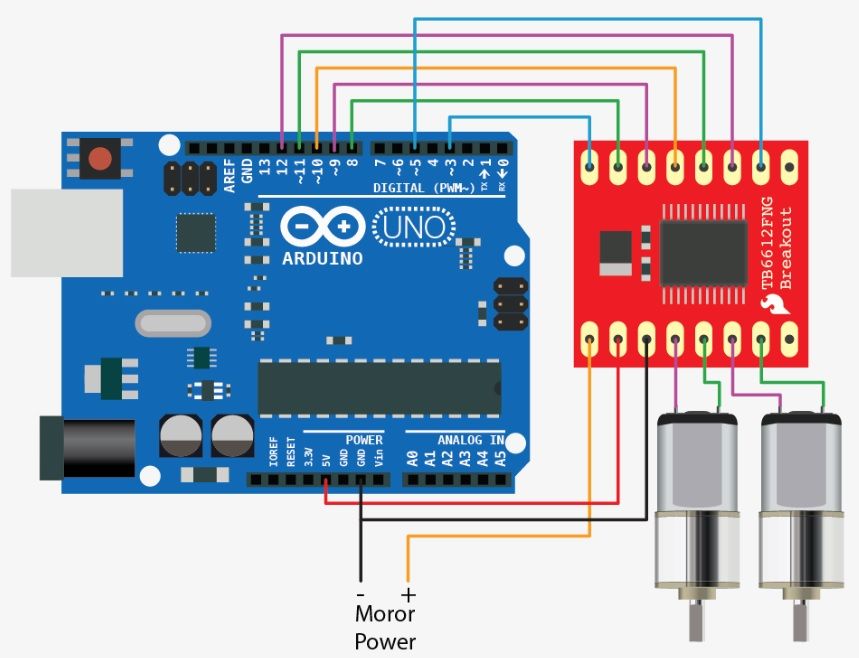
組裝板
用于整個LM7806穩(wěn)壓器的Arduino 101的9V電源輸出的DB6612FNG電壓。
步驟3:超聲波距離傳感器
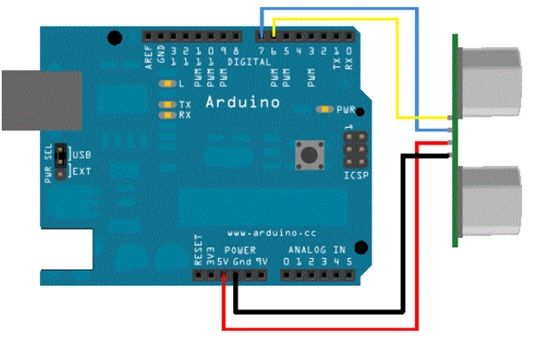
根據(jù)原理圖將HC-SR04超聲波傳感器連接到Arduino 101板
步驟4:3D打印
包括STL文件,它們被打印在沒有足夠高度的“金屬打印的Bot”機(jī)器上,需要將所有內(nèi)容調(diào)整為0.93%的大小才能能夠從www.tiguiverse.com打印STL文件
步驟5:容器切割
鉆頭用于切割容器的底部。 ,任何其他方法都可以正常工作
步驟6:膠印零件和容器
使用Duretan膠將3D打印的零件連接在一起,每次連接等待一晚上
步驟7:構(gòu)建框架
這是在金屬,弧焊中完成的,但木材也應(yīng)該很好,
步驟8:添加了振動電機(jī)
-由于存在將食物卡入腔室的問題,因此包含了此電機(jī)。
-目前重量是用膠帶固定的螺母,需要改進(jìn)它。但是可以正常工作約一個月。
-從舊的盒式錄音機(jī)中取出了6v電動機(jī)。
-從一個空的牛奶容器中切下了塑料。 》
第9步:加載草圖
共享貓的喂食草圖,可以進(jìn)行更改以增加部分或減少或增加鎖定時間(2小時)以不使貓過度喂食
真相是我們的貓習(xí)慣了噪音和振動,實際上喜歡在她到達(dá)時吃新食物,因此消除了10分鐘的延遲。
-
喂食器
+關(guān)注
關(guān)注
1文章
24瀏覽量
3126
發(fā)布評論請先 登錄
相關(guān)推薦
基于WT2000P4錄音IC的寵物喂食器應(yīng)用方案-支持手機(jī)APP功能拓展,遠(yuǎn)程下載更新

紫光閃存天貓旗艦店開業(yè)
光纖頭接光貓要用轉(zhuǎn)接盒嗎?
光纜怎么接光貓
寵物自動喂食器主控芯片DSH3186
AIGC在視頻內(nèi)容制作中的應(yīng)用前景
NVF04M錄音芯片在寵物喂食器的應(yīng)用:錄音播放功能,內(nèi)置SPI閃存

僅靠光貓上網(wǎng)多年后出現(xiàn)網(wǎng)絡(luò)故障后解決方法是需要加路由器嗎?
ESP32S2 UDP經(jīng)過電信WIFI光貓沒有任何數(shù)據(jù)返回是怎么回事?
光纖如何接入光貓接頭
如何用Arduino制作一個簡易自動喂魚器
基于WTR096-28SS芯片方案的寵物喂食器實現(xiàn)智能化喂食功能
求一種基于WTR096-28SS芯片方案的寵物喂食器設(shè)計方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論