 手套控制的機器人手的制作
手套控制的機器人手的制作
步驟1:購買零件
以下是我用于該項目的確切零件和鏈接的列表:
1 x Arduino Uno-$ 24.95
1 x Plastic Toy Hand-$ 10.99
5臺小型伺服電機-$ 15.70
5臺Flex傳感器-$ 64.75
1 x手套-$ 4.00,戴上不會變形的任何手套/起飛會起作用。
1 x PCB Board-$ 4.95,任何有孔的小PCB在這里都可以使用。
同樣,在本地的業余愛好商店取貨可能會更便宜。
1 x面包板-$ 5.95,同上。
5 x 22k歐姆電阻-$ 1.49,與上同
1 x魚線-$ 3.36,與上述相同。
本教程假定您已經可以使用一些基本的工具來構建項目,包括:
烙鐵和焊料
連接線
熱縮
膠帶
拉鏈
Superglue
電鉆
步驟2:制作手套和電路
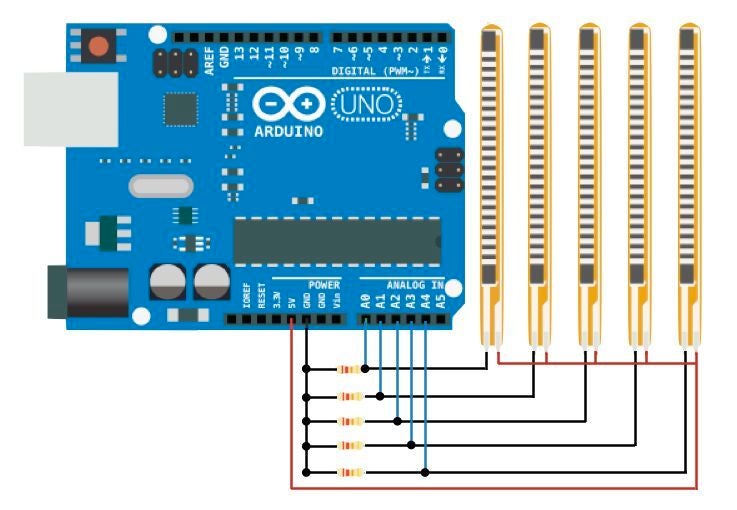
我將把大部分關于創建電路的教程重定向到此處的其他說明。這是一個非常簡單的電路,傳感器使用Arduino的5V電壓運行,并且22k電阻接地。只需確保將地線,模擬線和電阻器線都焊接在電路板下方即可。我用電線將顏色進行協調并用電線將所有電線包裹起來,因為您會繞過很多電線。
您將需要學習如何縫制以將電路連接到手套上。我在木板的四個角縫到手腕頂部。您還需要在每個柔性傳感器的頂部鉆一個小孔,以便將其縫在指尖中。我還用手指縫制了另外三個位置的傳感器。您越固定傳感器,通過Arduino獲得的值就越干凈,但是縫制手套非常繁瑣且耗時。我的建議是沿手指的三個指關節縫制,并稱其為好。
步驟3:組裝手
《到目前為止,這是該項目中最繁瑣且耗時的步驟。在繼續操作之前,請確保您有足夠的釣魚線,強力膠和松緊帶。首先將灰色指尖粘合到每個黑色手指上。然后以上圖所示的確切方式將每個電機上膠和拉緊。右上方和中間的馬達都逆時針旋轉,其余的則順時針旋轉。可以隨意測試自己的安排,但是如果按照我的布局進行操作,就不會遇到任何問題。
一旦所有強力膠變硬,您就可以繼續穿線釣魚線了。首先,您需要將線連接到電機附件的最后一個孔。您需要確保打結后,再將其穿過手指時,才能承受很大的拉力。如果在穿過手指后結變得松散,則必須重新開始。一旦結得很重并且有大量多余的松弛線,則將其穿過電動機的相應指狀部。在我的圖片中,電機的連接方式是,左上通過第二個手指,左下通過第一個手指,中下通過第四個手指,右下通過第三個手指,右上通過第五個手指。穿線后,我無法創建一個結,該結可能會沿線滑入指尖。如果您知道該怎么做,那就去吧。但是,另一種解決方案是將線放下并在綁緊前將其多次纏繞在頂部指節上。當您系上手指時,您將要確保手指和馬達之間存在一定的張力,因此可能需要嘗試幾次才能使其正確。一旦將所有五條線穿線并綁好,就恭喜!完成了項目中最困難的部分。
最后,您需要將一些電線插入伺服電機電線的母接頭中。紅色應連接到5V,棕色應接地,橙色應連接到數字輸出引腳。我將所有5V導線和接地導線焊接在一起并進行熱收縮,以便僅將一根用于電源和接地的導線連接到面包板上。
步驟4:完成電路
用5V線連接并在Arduino上接地到面包板。將伺服和傳感器電路的電源和地線連接到面包板上相應的位置。現在,您需要將來自傳感器的五條模擬線連接到Arduino上的模擬引腳A0至A4。我這樣做是為了確保它們順序正確(A0-拇指,A1-索引。..等等)。最后,將伺服信號線連接到Arduino上的數字引腳8至12。再次,我要確保它們順序正確(8-拇指,9-索引。..等等)。這應該完成電路的布線。
最后,為Arduino寫代碼。代碼非常簡單,在附加文件中遵循我的邏輯,您應該不會有什么麻煩。我的代碼是使電路運行的最低限度,請隨意使用它來優化電路。
-
傳感器
+關注
關注
2552文章
51364瀏覽量
755709 -
伺服電機
+關注
關注
85文章
2057瀏覽量
58076 -
Arduino
+關注
關注
188文章
6477瀏覽量
187567
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
PID控制在機器人中的應用案例
PID控制在機器人技術中的應用
伺服控制機器人的控制方式有哪些
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
助力風電行業!深視智能SR7400線激光以機器人手眼標定實現風力葉片切割引導

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
AMD Kria? KR 260套件+ROS 2快速開發機器人解決方案






 工商網監
工商網監
評論