") 機(jī)器人電氣系統(tǒng)詳解
機(jī)器人電氣系統(tǒng)詳解
步驟1:術(shù)語(yǔ)
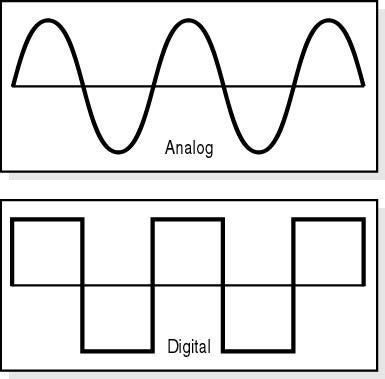
數(shù)字信號(hào):數(shù)字信號(hào)只有兩種狀態(tài):打開(kāi)或關(guān)閉。與數(shù)字信號(hào)通信的機(jī)器人組件通常通過(guò)改變它們?cè)陂_(kāi)和關(guān)之間交替的頻率來(lái)實(shí)現(xiàn)。
模擬信號(hào):與具有離散值的數(shù)字信號(hào)不同,模擬信號(hào)的輸出具有連續(xù)的值范圍。使用模擬信號(hào)的機(jī)器人組件通過(guò)改變信號(hào)電壓進(jìn)行通信。
PWM電纜:脈寬調(diào)制(PWM)電纜是一種通常用于允許機(jī)器人組件之間通過(guò)以下方式相互通信的電纜:數(shù)字或模擬信號(hào)。最常見(jiàn)的是,它們有3根電線,但是有些版本卻有1至5根電纜。
CAN:在FRC中,控制器局域網(wǎng)(CAN)用于控制電機(jī)控制器。幾個(gè)電機(jī)控制器串行連接到同一網(wǎng)絡(luò),然后由中央處理器控制。
編碼器:編碼器是用于測(cè)量旋轉(zhuǎn)的傳感器。它使用數(shù)字信號(hào)來(lái)傳達(dá)其所連接的軸已經(jīng)旋轉(zhuǎn)了一定程度的“ 1個(gè)計(jì)數(shù)”。編碼器之間每轉(zhuǎn)一圈的計(jì)數(shù)數(shù)量會(huì)有所不同,但每轉(zhuǎn)可以從一千到一千。 li》
照片來(lái)源:http://www.dallasmobilec.com/AnalogDigital.html
步驟2:CRIO
cRIO是FRC機(jī)器人的中央處理單元。使用在LabVIEW,C ++或Java中生成的代碼,它從驅(qū)動(dòng)器和傳感器獲取輸入,并將指令輸出到電動(dòng)機(jī),氣動(dòng)電磁閥和其他設(shè)備。盡管其操作就像將操縱桿值映射到電動(dòng)機(jī)速度一樣簡(jiǎn)單,但它也可以執(zhí)行復(fù)雜的控制循環(huán)和自動(dòng)命令。 cRIO是模塊化的,允許團(tuán)隊(duì)對(duì)其進(jìn)行自定義以滿足其機(jī)器人的需求。
團(tuán)隊(duì)可能會(huì)遇到兩種版本的cRIO。第一張圖片顯示了cRIO-FRC,第二張圖片顯示了cRIO-FRC II。這兩個(gè)版本之間唯一的實(shí)際區(qū)別是它們支持的模塊數(shù)量。 cRIO-FRC支持八個(gè)模塊,而cRIO-FRC II支持四個(gè)模塊。受支持的模塊數(shù)量減少,也可以使cRIO變得更輕便,占地面積也更小。 cRIO-FRC II從2012年開(kāi)始提供給新手團(tuán)隊(duì),老兵團(tuán)隊(duì)可以選擇購(gòu)買一個(gè)。
作為機(jī)器人的隱喻大腦,cRIO與控制系統(tǒng)的許多不同部分相連。它的可交換模塊可用于將其連接到Digital Sidecar,Analog Breakout和螺線管Breakout。 cRIO由配電板的24V連接供電。它通過(guò)以太網(wǎng)電纜連接到D-Link路由器,從而使其能夠與連接到路由器的其他組件以及與Drive Station無(wú)線通信。最后,cRIO有一個(gè)串行端口,可用于通過(guò)CAN總線與Jaguars連接,這是控制Jaguars的一種選擇。
圖片來(lái)源:
http://www.chiefdelphi.com/media/photos/31871
https://decibel.ni.com/content/docs/DOC-19103
步驟3:控制板
Digital Sidecar是一個(gè)模塊,充當(dāng)發(fā)送到cRIO和從cRIO發(fā)送的數(shù)字信號(hào)的集線器。它接收的信號(hào)從輸出數(shù)字信號(hào)的傳感器(例如編碼器或氣壓開(kāi)關(guān))發(fā)送。它發(fā)送的信號(hào)用于控制電機(jī)控制器或伺服電機(jī)等設(shè)備。
Digital Sidecar通過(guò)DB37帶狀電纜連接到cRIO模塊。它通過(guò)PWM電纜連接到傳感器,Jaguar和Victor電動(dòng)機(jī)控制器以及Spike繼電器。它由與配電板的12V連接供電,并通過(guò)2針PWM電纜為Signal LED供電。
Analog Breakout是允許cRIO將模擬信號(hào)作為輸入的模塊。模擬輸入與電位計(jì)和紅外測(cè)距儀等傳感器一起使用。此外,它還提供了一個(gè)選項(xiàng)來(lái)測(cè)量來(lái)自模擬輸入之一的電池電壓。
模擬中斷直接連接到cRIO NI 9201模擬輸入模塊。它通過(guò)12V連接到配電板的電源接收電力,并通過(guò)PWM電纜接收來(lái)自傳感器的數(shù)據(jù)。
電磁閥中斷是一個(gè)模塊,允許cRIO控制氣動(dòng)系統(tǒng)中使用的電磁閥。它可以為12V或24V螺線管供電,但一次只能供電一種。
電磁閥分支直接連接到cRIO NI 9472數(shù)字源模塊。它通過(guò)與配電板的12V連接或從也提供給cRIO的24V電源獲得電源。電磁閥中斷通過(guò)2針PWM電纜將命令發(fā)送到電磁閥。數(shù)碼%20Sidecar.pdf結(jié)果http://www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and_Season__Info/2012_Assets/Analog%20Breakout.pdf點(diǎn)擊HTTP://www.usfirst。 org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and_Season__Info/2012_Assets/Solenoid%20Breakout.pdf
第4步:配電
12伏鉛酸電池為FRC機(jī)器人上的所有電氣系統(tǒng)供電。
12V電池的正極端子。連接到120 Amp斷路器,而負(fù)極端子直接連接到配電板。
120 Amp斷路器是機(jī)器人的打開(kāi)/關(guān)閉開(kāi)關(guān)。它還可以將機(jī)器人上所有電子設(shè)備的電流消耗限制為120A,盡管該限制可以在短時(shí)間內(nèi)斷開(kāi)。
120 Amp斷路器在一個(gè)端子上從機(jī)器人12V電池的正極直接連接,將其連接到配電板的正極端子。
配電板將電源從12V電池分配到機(jī)器人上的所有不同組件。它還通過(guò)使用20、30和40安培自動(dòng)復(fù)位斷路器來(lái)調(diào)節(jié)每個(gè)組件的功耗。
配電板幾乎連接到控制系統(tǒng)的每個(gè)部分。其主要正極端子連接到120 A斷路器,而其主要負(fù)極端子直接連接到電池。它具有用于cRIO和電磁突圍的24V連接,用于攝像機(jī)的5V連接以及用于路由器電源轉(zhuǎn)換器的專用12V連接。它具有8個(gè)12V連接,可以吸收40安培的電流,還有12個(gè)12V端子,可以吸收30安培的電流。這些端子連接到許多組件,例如電動(dòng)機(jī)控制器,cRIO分支板,甚至是定制電路。
機(jī)器人配電系統(tǒng)的最后一部分是路由器電源轉(zhuǎn)換器。此組件將專用于路由器的12V電源轉(zhuǎn)換為D-Link路由器所需的電壓。
路由器電源轉(zhuǎn)換器連接到配電板的12V路由器連接以及D-Link路由器本身。
圖片來(lái)源:
http://www.batterystore.com/Yuasa/YuasaImages/NP18-12.jpg
http://www.andymark.com/product-p/am-0282.htm
http://www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and_Season__Info/2012_Assets/Power%20Distribution%20Board.pdf點(diǎn)擊http://www.andymark.com/product- p/am-0899.htm
第5步:電機(jī)控制器
Jaguar馬達(dá)控制器有兩種版本:一種是黑色塑料,另一種是灰色塑料。這兩個(gè)版本之間的差異是相當(dāng)技術(shù)性的,因此在本教程中我不會(huì)解決。捷豹為其連接的電動(dòng)機(jī)提供速度和方向控制。控制它們的最常見(jiàn)方法是使用PWM電纜,但是它們可以通過(guò)CAN總線連接。通過(guò)CAN總線連接Jaguars可以釋放電動(dòng)機(jī)控制器中的其他功能。例如,CAN連接將允許團(tuán)隊(duì)將編碼器連接到Jaguar,并使用其處理能力來(lái)進(jìn)行速度和位置的閉環(huán)控制。
Jaguar電動(dòng)機(jī)控制器的主要連接是配電板的12V電壓之一。輸出并連接到電動(dòng)機(jī)。盡管Jaguar必須以正確的極性連接到配電板上的端子,但是可以在Jaguar的輸出上交換電動(dòng)機(jī)的極性。但是,這樣做會(huì)根據(jù)代碼給出的方向交換電動(dòng)機(jī)的旋轉(zhuǎn)方向。此外,如果使用PWM控制,則捷豹通過(guò)PWM電纜連接到Digital Sidecar,如果使用CAN控制,則連接到cRIO的串行端口。最后,可以將編碼器連接到Jaguar的5針PWM端口,以進(jìn)行閉環(huán)速度和位置控制。
Victor 884電動(dòng)機(jī)控制器與Jaguar電動(dòng)機(jī)控制器非常相似。像捷豹一樣,它可以控制與其相連的電動(dòng)機(jī)的速度和方向。但是,只能用PWM電纜控制Victor,因此無(wú)法利用CAN總線提供的優(yōu)勢(shì)。盡管如此,許多經(jīng)驗(yàn)豐富的團(tuán)隊(duì)仍繼續(xù)使用Victor,因?yàn)樗鼈兊恼嫉孛娣e更小且被認(rèn)為更可靠。
Victor電動(dòng)機(jī)控制器通過(guò)其12V端子之一連接至配電板,并直接連接至電動(dòng)機(jī)。它由Digital Sidecar通過(guò)PWM控制。最后,必須將Victor的冷卻風(fēng)扇與走線到配電板的電線連接。
Spike繼電器實(shí)質(zhì)上是用作組件的開(kāi)/關(guān)開(kāi)關(guān)。當(dāng)與電動(dòng)機(jī)一起使用時(shí),可用于正向,反向或斷開(kāi)驅(qū)動(dòng)它們。 Spike還可以用于打開(kāi)或關(guān)閉其他電子設(shè)備,例如燈或壓縮機(jī)。最后,除了配電板上的斷路器外,Spike繼電器還有一個(gè)用于20安培斷路器的端口。
Spike連接到配電板的12V 30安培端子之一。它的輸出可以連接到電動(dòng)機(jī),壓縮機(jī),照明燈或電磁閥。它通過(guò)與數(shù)字邊車的PWM連接進(jìn)行控制。
照片來(lái)源:http://files.chinaaet.com/images/2012/05/08/efdf49ff-fced-45d9-8048-ab8f0730d62c.jpg結(jié)果http://team358.org/files/programming/ControlSystem2009-/components.php結(jié)果http://www.vexrobotics.com/products/vexpro/victor-speed-controller.html點(diǎn)擊HTTP://www.vexrobotics.com/products/vexpro/217-0220.html
步驟6:其他
在競(jìng)爭(zhēng)中,D-Link DAP-1522路由器允許駕駛員無(wú)線控制機(jī)器人。它使用Wi-Fi在機(jī)器人和駕駛員控制站之間建立無(wú)線網(wǎng)橋。
D-Link路由器通過(guò)路由器電源轉(zhuǎn)換器供電,并通過(guò)以太網(wǎng)電纜連接到cRIO。路由器還可以通過(guò)以太網(wǎng)連接到其他設(shè)備,從而允許它們與cRIO和驅(qū)動(dòng)程序站進(jìn)行通信。最常使用這種連接方式的設(shè)備是Axis攝像機(jī)。
Rockwell Signal LED用于警告機(jī)器人周圍的人它正在運(yùn)行,并傳達(dá)有關(guān)其當(dāng)前狀態(tài)的其他信息。信號(hào)LED總共使用五種不同的閃爍模式。以下是不同模式及其指示的列表:
穩(wěn)定開(kāi)啟:自主模式
短路關(guān)閉:(1500ms開(kāi)啟,100ms關(guān)閉):遙控模式
慢速閃爍(打開(kāi)900毫秒,關(guān)閉900毫秒)
快速閃爍(打開(kāi)200毫秒,關(guān)閉200ms):由于沒(méi)有駕駛員站通訊,錯(cuò)誤的cRIO圖像,錯(cuò)誤的團(tuán)隊(duì)ID而導(dǎo)致系統(tǒng)錯(cuò)誤,或出現(xiàn)許多通信錯(cuò)誤
快慢閃爍(打開(kāi)200毫秒,關(guān)閉900毫秒):電池電量低和系統(tǒng)被系統(tǒng)監(jiān)視程序,用戶監(jiān)視程序或設(shè)置為禁用的Driver Station禁用。
Rockwell Signal LED通過(guò)2針PWM電纜連接到Digital Sidecar。
有兩個(gè)攝像頭可以連接到機(jī)器人,用作視覺(jué)處理的傳感器,也可以用作反饋設(shè)備。司機(jī)。盡管有兩種型號(hào)的攝像機(jī),即Axis M1011和Axis 206,但它們?cè)诠δ苌鲜堑刃У摹?/p>
攝像機(jī)通過(guò)專用的5V連接從配電板接收電源。它還通過(guò)以太網(wǎng)電纜連接到D-Link路由器,從而使其可以與cRIO和驅(qū)動(dòng)程序站進(jìn)行通信。
圖片來(lái)源:
http://www.andymark.com/product-p/am -0839.htm結(jié)果http://raise.rockwellautomation.com/RAConfig/config.asp?cmd=edit&CID=B4E7802D0FE341B89316216E3527C565點(diǎn)擊http://www.icode.co.uk/icatcher/cctvshop/axis-m1011 -network-camera-p-372.html
http://www.vitechsecurity.co.uk/images/axis_206.jpg
第7步:駕駛員站
Driver Station便攜式計(jì)算機(jī)是控制機(jī)器人的便攜式計(jì)算機(jī)。盡管FIRST為該角色提供了Classmate上網(wǎng)本,但團(tuán)隊(duì)可以選擇在其他筆記本電腦上安裝Driver Station軟件。通過(guò)提供比賽,軟件開(kāi)發(fā)和調(diào)試的重要信息,Driver Station充當(dāng)控制機(jī)器人的儀表板。有些團(tuán)隊(duì)將諸如視覺(jué)處理的任務(wù)從cRIO轉(zhuǎn)移到Driver Station,從而使代碼運(yùn)行得更快,并減輕了cRIO的負(fù)擔(dān)。
Driver Station必須連接到團(tuán)隊(duì)希望使用的任何控件。這些控制器與可選的賽普拉斯板一起通過(guò)標(biāo)準(zhǔn)USB連接進(jìn)行連接。在建造季節(jié)中,Driver Station可以通過(guò)Wi-Fi與機(jī)器人直接通信,但在比賽期間必須通過(guò)提供的以太網(wǎng)電纜插入。筆記本電腦由制造商使用的任何電源供電。競(jìng)賽期間,競(jìng)賽還提供了Classmate的電源連接。
賽普拉斯FirstTouch板是芯片上的Arduino供電系統(tǒng),允許團(tuán)隊(duì)為他們的機(jī)器人創(chuàng)建自定義控制接口。
FirstTouch連接到驅(qū)動(dòng)程序帶有隨附USB電纜的工作站筆記本電腦。它還可以連接到團(tuán)隊(duì)選擇使用常規(guī)電纜使用的任何自定義按鈕。
驅(qū)動(dòng)程序控制站的最后一個(gè)組件是控制器本身。團(tuán)隊(duì)可以選擇使用幾乎任何USB供電的控制器,無(wú)論它是隨附的操縱桿,Xbox 360游戲手柄還是他們選擇的其他控制器之一。許多團(tuán)隊(duì)分散了控制機(jī)器人的職責(zé),由一個(gè)人駕駛,另一人控制機(jī)器人。在這種情況下,團(tuán)隊(duì)可以混合使用并匹配其控制器,以迎合其駕駛員的喜好。
圖片來(lái)源: http://team358.org/files/programming/ControlSystem2009-/components.php結(jié)果http://www.andymark.com/Attack3-p/am-0598.htm點(diǎn)擊http://ownedgamers.com/wp-content/uploads/2012/04/xbox-360-controller-recovers-stolen-console.jpg
第8步:文檔
希望本教程可以幫助您熟悉FIRST機(jī)器人大賽中使用的控制系統(tǒng)。如果您想了解有關(guān)FRC控制系統(tǒng)的更多信息,最好的學(xué)習(xí)方法是閱讀FIRST和零件制造商提供的技術(shù)文檔。我在此步驟所附的壓縮文件夾中包含了FIRST的一些技術(shù)和支持文檔。技術(shù)文檔更詳細(xì)地討論了各個(gè)組件,而支持文檔則描述了它們?nèi)绾我黄鹗褂谩N蚁Ml(fā)現(xiàn)此合并資源有幫助。
責(zé)任編輯:wv
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
207985 -
電氣系統(tǒng)
+關(guān)注
關(guān)注
1文章
368瀏覽量
24296
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
《具身智能機(jī)器人系統(tǒng)》第10-13章閱讀心得之具身智能機(jī)器人計(jì)算挑戰(zhàn)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+兩本互為支持的書(shū)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.全書(shū)概覽與第一章學(xué)習(xí)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識(shí)與基礎(chǔ)模塊
鴻蒙機(jī)器人與鴻蒙開(kāi)發(fā)板聯(lián)動(dòng)演示
協(xié)作機(jī)器人拽拖示教詳解
ROS讓機(jī)器人開(kāi)發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
Al大模型機(jī)器人
abb機(jī)器人系統(tǒng)密鑰在哪
工業(yè)機(jī)器人電氣控制系統(tǒng)的體系結(jié)構(gòu)主要有哪些
SystemWeaver—電子電氣系統(tǒng)協(xié)同研發(fā)平臺(tái)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論