") 關(guān)于ABS 模型仿真的分析和應(yīng)用
關(guān)于ABS 模型仿真的分析和應(yīng)用
車 隊 簡 介
吉林大學吉速車隊在全國方程式汽車大賽 2018 賽季獲得全國總冠軍,吉速電動方程式賽車隊在該賽季獲得 MATLAB 仿真獎一等獎。小編特邀車隊來分享他們的 ABS 模型仿真經(jīng)驗。
在 2017 賽季當中,襄陽雨賽,車輪容易抱死,車輛轉(zhuǎn)向困難,車手不能把握車輪方向,過度打方向盤,待前輪恢復轉(zhuǎn)向能力時候因為過大的車輪轉(zhuǎn)角,導致車輛沖出賽道。ABS 則能夠防止車輪抱死,使車輛檢具有轉(zhuǎn)向能力。同時考慮到大學生方程式車手多為業(yè)余車手,水平有限,無法很好的控制制動踏板,為了提升整車性能,引入ABS系統(tǒng)。ABS 控制策略是一個相對復雜的控制策略,需要經(jīng)過足夠的測試。
而在2017賽季,我們曾自行搭建一個車輛動力學模型來測試算法,但這浪費很多的時間,而且在搭建模型的初期有很多考慮不全的地方,這也會導致后期花費大量的時間去修改仿真模型以達到可以使用的程度,導致驗證2017賽季控制策略的時間縮短很多,同時因為模型本身也存在一定的問題,修改模型本身的問題之后,又導致算法仿真驗證又要重新進行。針對這種情況,我們在驗證 2018 賽季當中,直接采用 Vehicle Dynamic Blockset 與 Powertrain Blockset 進行仿真模型的搭建,這能加速我們模型的搭建過程,同時也能節(jié)約很多的時間,減少模型 bug 的存在。
在 Simulink 中我們找到參考模型 Double Lane Change Reference Application。由于采用的是工具箱自帶的車輛進行仿真,簡化了操作,因此我們只需做少量必要的修改即可,這也大大提高了開發(fā)效率。另外,通過采用這種 Simulink Project 也使得我們在 2018 賽季能夠順利實現(xiàn)協(xié)同開發(fā)。
最終的仿真模型如下面視頻所示:
接下來,將對我們的模型搭建和仿真進行逐一介紹:
車道子系統(tǒng)
這部分模塊主要生成車手的操作,可以有三種方式來生成:
第一種是通過修改 Lane Subsystem 可以生成特定的駕駛員操作,第二種是利用之前同濟電車隊介紹過(2018年9月11號的微信推文)的記錄下車手的操作導入到Simulink環(huán)境中操作,第三種是 MATLAB R2018b 中利用 Speedgoat 與羅技G29聯(lián)合讓車手交互進行特定的操作,這也稱之為 Driver-In-the-Loop。第一種方式在初期階段利用典型工況能夠很好地評估算法的準確程度,第二種與第三種方式相對而言車手的操縱可以更加豐富一些,能夠測試更多的工況,比如在部分制動以及過彎制動情況下,測試是否ABS制動干預過早等問題,但相對而言第一種方式可以很快地評估算法,后兩種稍微復雜一些。
一方面,該子系統(tǒng)可用于生成運動軌跡,借助于 Visualization 子系統(tǒng)進行顯示。考慮暫不需要變道路況,我們將原參考模型中的變道軌跡修改為直線軌跡。根據(jù)這部分可以生成駕駛員的轉(zhuǎn)向操作。
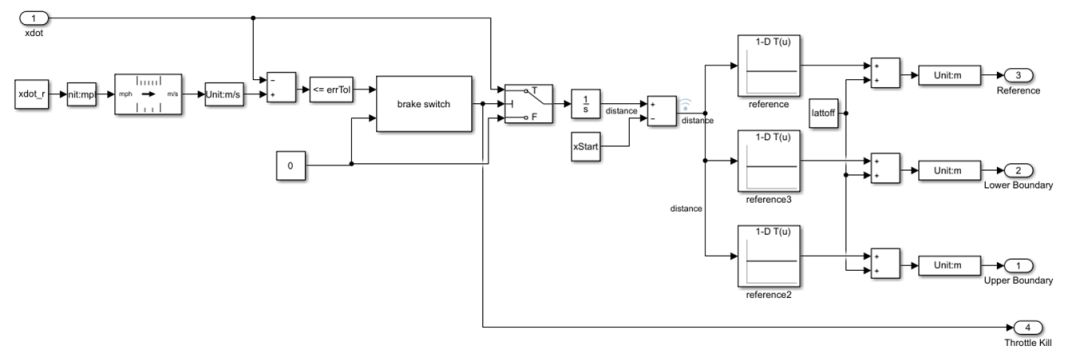
圖1:運動軌跡生成
另一方面,它也生成目標車速,傳遞給 Predictive Driver 子系統(tǒng),作為預判,生成車手的特定操縱行為。當車速達到設(shè)定車速后,啟動目標車速為0的制動預判,這樣車手采取的便是緊急制動,在后面的Controller模塊中就會觸發(fā)ABS控制操作。

圖2:目標車速生成
環(huán)境
該子系統(tǒng)搭建了外部環(huán)境。ABS可以使車輛保持一定的操縱穩(wěn)定性,尤其當輪與路面間的摩擦因子不完全相同時,為了仿真對開路面,在該模塊下,增加了 Friction 切換。
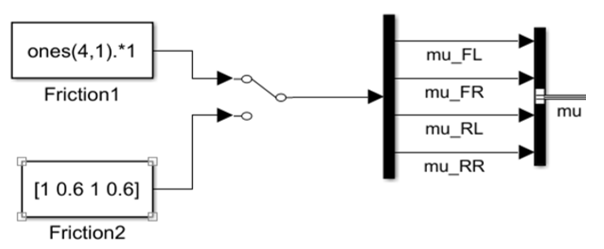
圖3:Friction配置
Friction1,表示四輪具有相同的摩擦系數(shù)。而Friction2,則表示右側(cè)車輪的摩擦系數(shù)相同且小于左側(cè),可以滿足對開路面的仿真要求。后來我們在仿真時改為利用回調(diào)來改變參數(shù)。
在參考模型的控制器制動邏輯中,包含了BangBang ABS(較為簡單的ABS邏輯)和Open Loop(開環(huán)無ABS控制)兩大子系統(tǒng)。我們將18賽季開發(fā)的ABS邏輯策略acc_relative_slip_ABS也集成于此,采用變體子系統(tǒng),使設(shè)計更加靈活,且不受I/O接口的限制,方便多種模型方案的相互比較和切換。
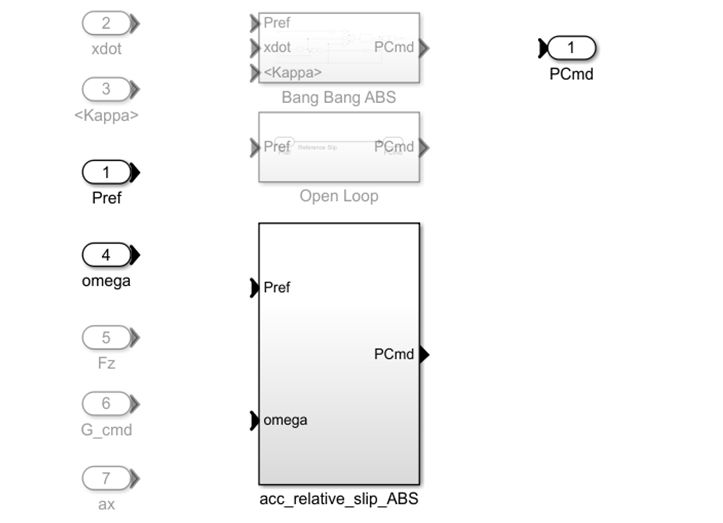
圖4:制動邏輯
Logic模塊是ABS的邏輯策略,采用輪角減速度alpha和滑移率作為控制變量,具體策略在文獻[1]中介紹得比較詳細,在此不進行贅述。其中前后輪的控制策略相同,不過因為后輪的轉(zhuǎn)動慣量大于前輪,所以相應(yīng)的控制參數(shù)會有些不同。
參數(shù)靈敏度分析
由于參數(shù)過多,人為地去逐個分析十分困難。為了更好地掌握各個控制參數(shù)對制動性能的影響,方便優(yōu)化模型,于是我們進行了參數(shù)靈敏度分析。通過制動距離的長短來表征制動效能的高低,使用Sensitivity Analysis工具提供的方法來計算制動距離對這些參數(shù)的敏感度。
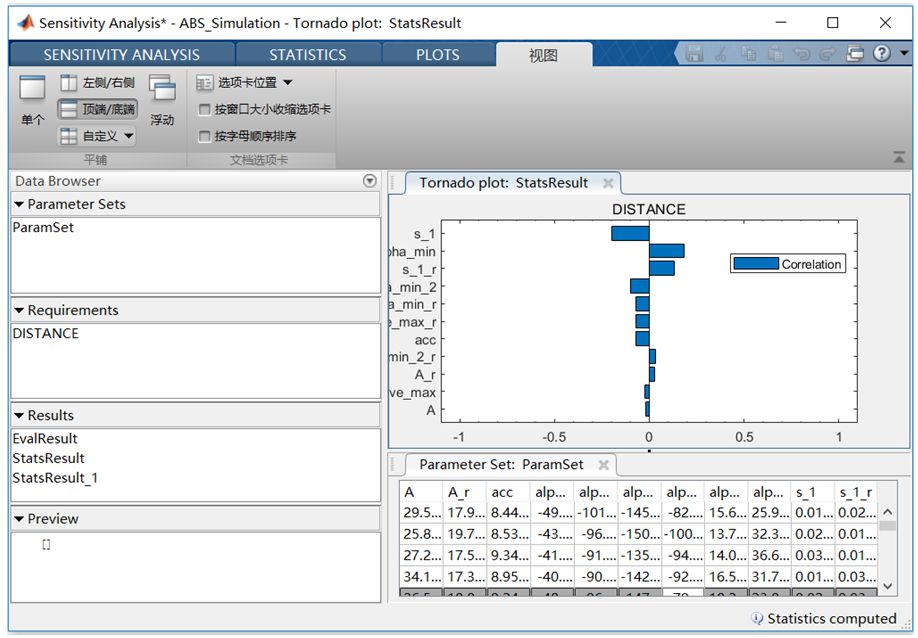
圖5:參數(shù)靈敏度分析
仿真結(jié)果分析
在仿真結(jié)束后,接下來就是分析結(jié)果和優(yōu)化模型的過程,這也是十分重要的環(huán)節(jié),決定了模型是否具有實用性。在前文中也說到:搭建模型時就做好信號記錄,這樣我們就能盡情使用 Data Inspector 工具進行數(shù)據(jù)查看。詳盡的數(shù)據(jù),自由的組合極大地方便了我們觀測和分析結(jié)果。
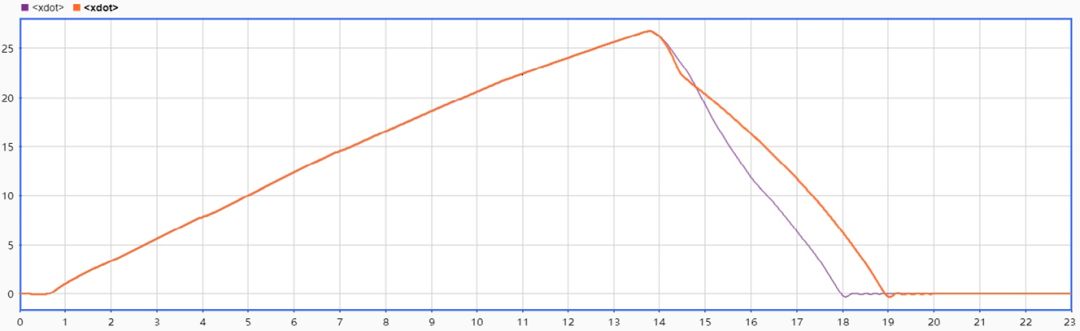
圖6:純制動工況下含ABS與不含ABS制動性能的比較
(紫色線含有ABS,紅色線不含ABS制動,xdot表示車速)
對于車身穩(wěn)定性和運動軌跡可以在點擊四種工況圖標后,隨著仿真的進行在左下角的figure窗口中看到。四種工況對比如下:
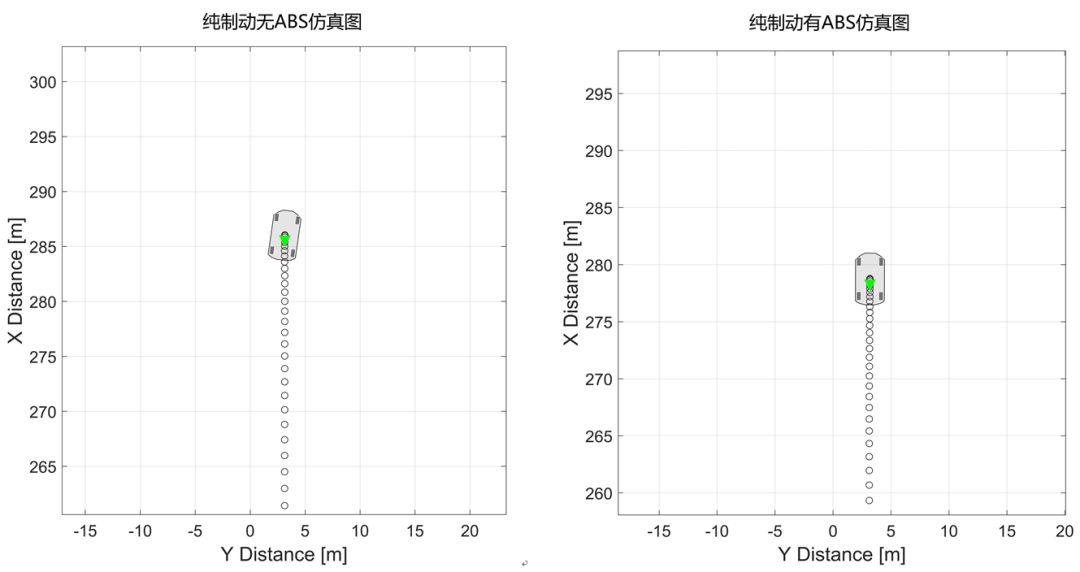
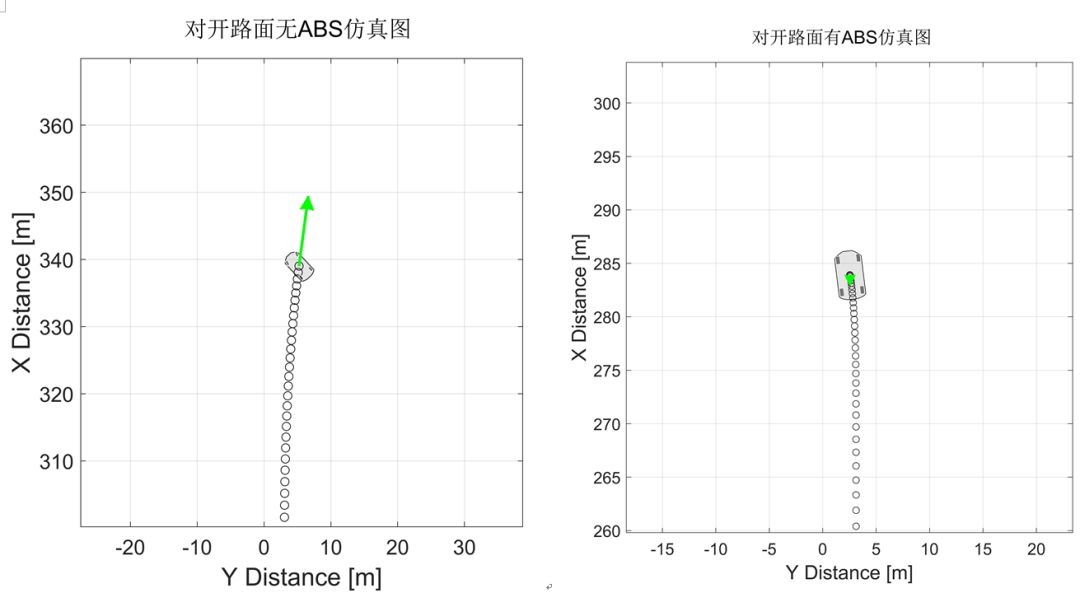
圖7:四種工況對比
在Visualization中,我們利用設(shè)置好的Scope觀察到制動時參考車速輪速的關(guān)系如圖:
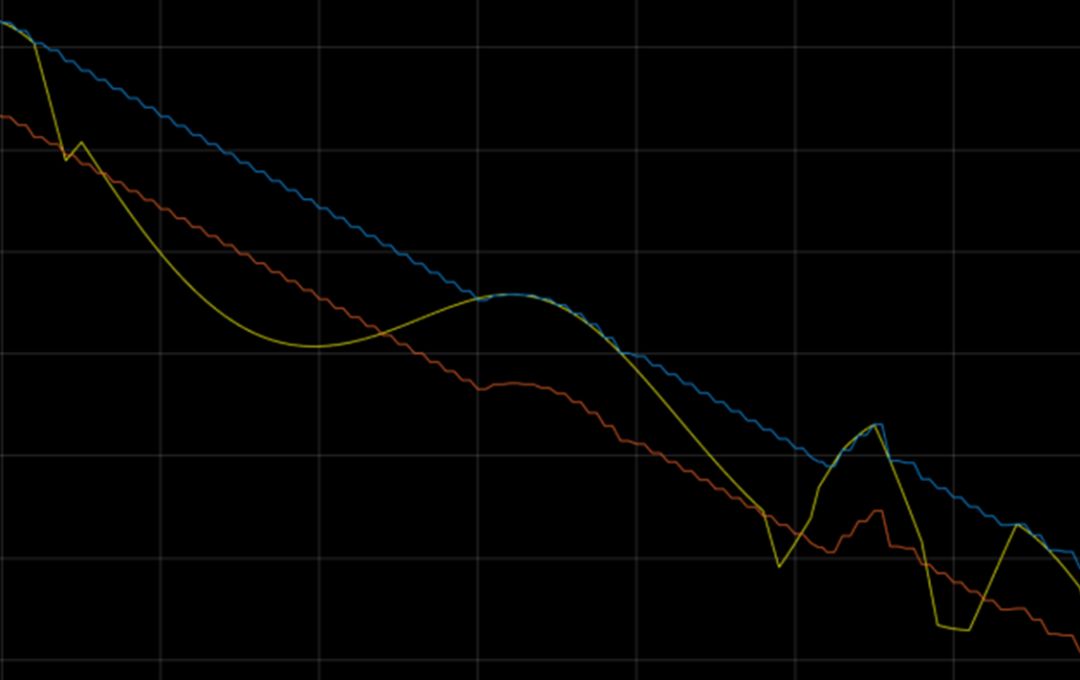
圖8:仿真數(shù)據(jù)圖
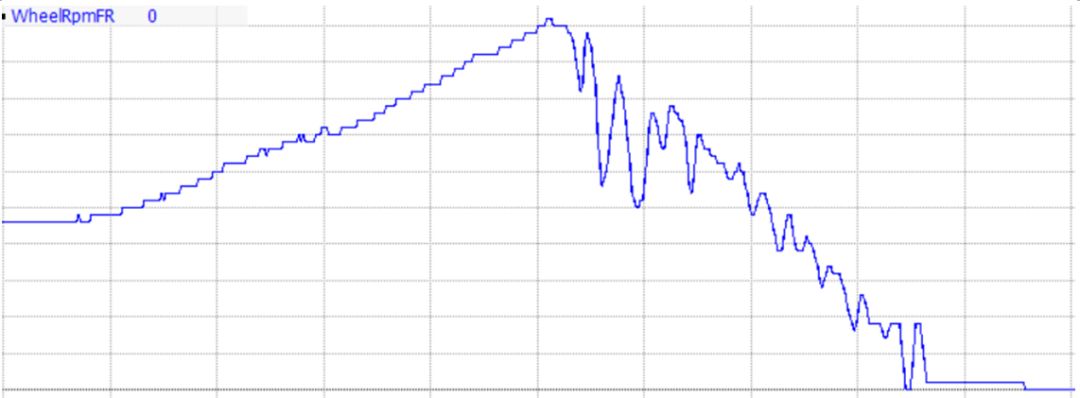
圖9:路測數(shù)據(jù)圖
因為車輛運行的道路實際運行情況,仿真數(shù)據(jù)和路測數(shù)據(jù)存在數(shù)值上的差別,當時二者的曲線的走勢是相同的。
仿真能夠提前驗證算法的正確性與合理性,在項目的初始階段進行仿真,可以幫助我們更好地發(fā)現(xiàn)和理解問題,找到問題的實質(zhì)所在。找出通過比較兩圖的相似度,我們在仿真階段驗證了搭建的ABS模型的正確性和可行性。車輛動力學仿真的成功給予了我們指導性的意義,給了我們實際操作和應(yīng)用前的寶貴預判,也為設(shè)計和實車應(yīng)用節(jié)約了大量時間。
輪胎數(shù)據(jù)處理
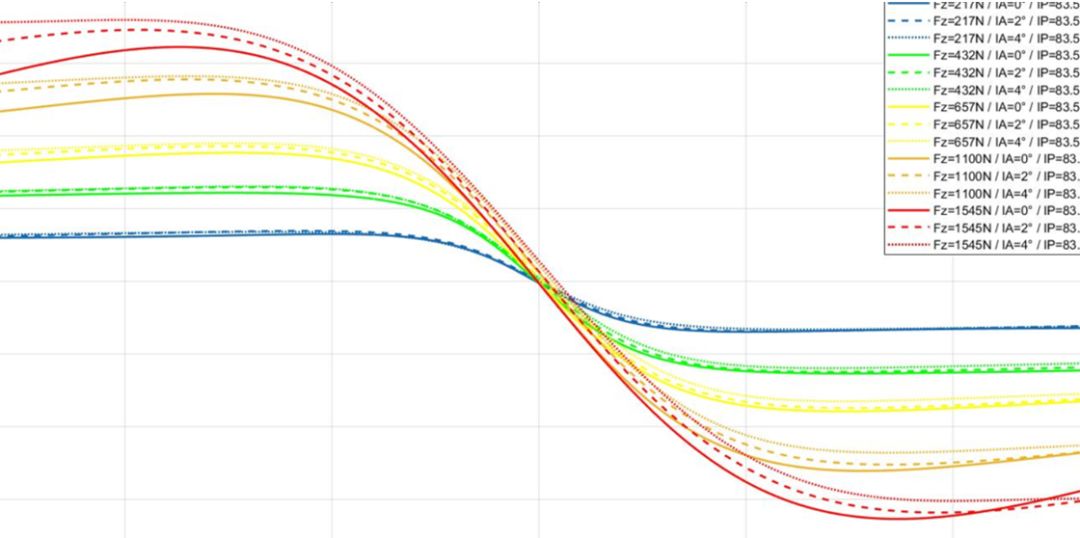
輪胎,是整個賽車的核心部件,輪胎不同,則整個賽車的設(shè)計也就不同。因此,輪胎的數(shù)據(jù)處理在整個設(shè)計過程中也是有著非常重要的地位,很多賽車隊都有TTC的輪胎數(shù)據(jù),對輪胎數(shù)據(jù)進行必要的分析,整理幾十萬的raw data是為以后的設(shè)計工作奠定基礎(chǔ)。輪胎數(shù)據(jù)的整理可以參考racing-lounge中介紹過文章。
不過因為數(shù)據(jù)的原因,導致文章中的腳本文件不能適合每一組的實驗數(shù)據(jù),對文件做一定的修改是必須的,最后利用 Curve Fitting Toolbox 對實驗數(shù)據(jù)進行擬合,就能夠得到比較準確的擬合參數(shù),也可以得到非常漂亮的曲線,最后利用擬合出來的輪胎數(shù)據(jù)分析整車動態(tài)性能,也可以用于車輛動態(tài)控制的仿真。
總結(jié)
正所謂仿真驅(qū)動設(shè)計,最初的建模盡管會很耗費時間,但這是非常必須的,因為它能為我們后期我們測試各種算法提供很好并且可控的平臺,直接從仿真曲線當中看出各種參數(shù)的影響以及曲線邏輯的變化趨勢,也能直接在仿真當中調(diào)試出自己代碼的很多不足之處,查找出初期控制思路不成熟的地方,這能節(jié)約大量的時間。
-
控制器
+關(guān)注
關(guān)注
112文章
16444瀏覽量
179143 -
效率
+關(guān)注
關(guān)注
0文章
149瀏覽量
20086
發(fā)布評論請先 登錄
相關(guān)推薦
利用.func命令運行仿真的方法
Simulink模型仿真與分析技巧
如何通過建模與仿真提升電力電子組件的設(shè)計與性能?

功放設(shè)計仿真的一般步驟
機器人仿真的類型和優(yōu)勢

用TINA如何搭建仿真模型?
下載了LM2901的LTSPICE模型進行仿真報錯怎么解決?
康謀分享 | 自動駕駛聯(lián)合仿真——功能模型接口FMI(二)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論