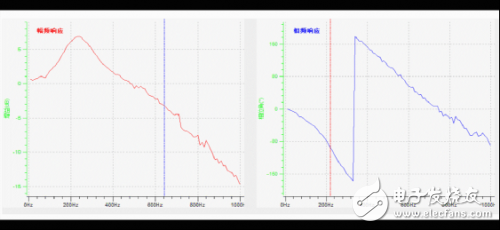
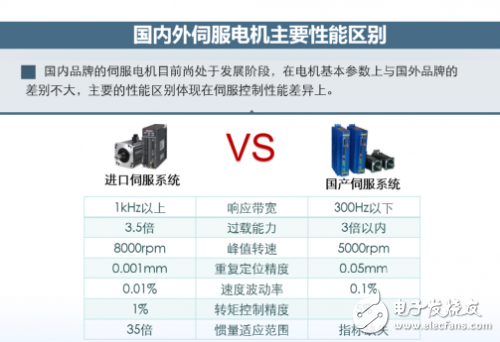
伺服控制系統廣泛的應用在工業機器人、數控機床、電子制造、印刷機械、紡織機械等領域,在工業生產中發揮重要的作用。在工業機器人和數控機床等領域,響應速度快、轉矩抖動小和精度高的伺服控制系統越來越關鍵
2019-02-25 09:48:27
有沒有機器人比較全的資料
2017-03-21 12:35:21
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
機器人用伺服電機與加工中心的伺服電機有什么區別?假設電機的尺寸功率相當?如安川的CTSD M2D-A3023-M200 size:130X130
2016-01-27 11:01:31
現在的機器人使用的電機多是什么品牌的呀,還是自己根據需求定制的呀?
2016-03-15 10:37:57
直流電機如何實現驅動控制?機器人上到底用什么電機好?
2021-10-13 07:43:29
、物體是否滑落等。 機器人傳感器主要類別: 內傳感器 機器介機電一體化的產品,內傳感器和電機、軸等機械部件或機械結構如手臂(Arm)、手腕(Wrist)等安裝在一起,完成位置、速度、力度的測量
2018-11-08 15:55:32
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
機器人關節是機器人各個零部件之間發生相對運動的機構。關節之中,單獨驅動的為主動關節,反之稱為從動關節。機器人關節模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。機器人關節電機
2021-05-27 11:26:11
現在想做機器人圖像識別方面的研究,有問題請教大家,比如說:現在有十種瓶子,機器人能識別我指定的瓶子,并把它從A位置移動到B位置,關鍵是如何識別呢,不是很清楚,求大神指點!在此感激不盡!
2019-11-04 09:02:57
想弄一個vi可以動態顯示機器人的姿態,但不知道有什么函數可以引入機器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
移動機器人有沒有推薦的MCU,萌新求大佬幫助
2020-11-03 11:41:09
各位論壇前輩你們好,我是一名在校的即將升入大二學生,專業課暫時只學了c,電路分析基礎和工程制圖。我跟另外4個同學正在參加學校的機器人比賽,在機器人創意表演方面,就突發奇想,是否能做一個可以彈簡單
2017-05-22 17:09:06
來進行控制的。有了這些控制卡和芯片,我們所要做的就是把微控制器和這些連接起來,然后就可以用程序來控制電機了。第二個問題是控制電機的速度,在機器人上的實際表現就是機器人或者手臂的實際運動速度了,機器人走
2015-01-16 17:21:37
機器人有哪些種類?大家來說說
2014-12-25 10:01:32
機器人有哪些類型?
2021-06-18 06:41:57
、指令機構三大部分構成,伺服電機是執行機構,就是靠它來實現運動的,伺服驅動器是伺服電機的功率電源,指令機構是發脈沖或者給速度用于配合伺服驅動器正常工作的。 機器人對伺服電機的要求比其它兩個部分都高
2018-10-12 11:01:08
的切換。2.伺服點焊機器人系統實現更高的焊接質量并滿足性能要求,AP12線還引進采用了新型中頻點焊伺服焊槍控制技術。此系統可滿足高強/超高強度鋼板和多層板材的焊接,以適應汽車輕量化與車身防撞安全不斷提高
2017-09-12 17:04:50
系統實現更高的焊接質量并滿足性能要求,AP12線還引進采用了新型中頻點焊伺服焊槍控制技術。此系統可滿足高強/超高強度鋼板和多層板材的焊接,以適應汽車輕量化與車身防撞安全不斷提高的要求。伺服點焊機器人
2018-11-01 11:25:28
的響應速度要快,控制精度要高。而“狠”字又怎么解呢?其實大家仔細想想,伺服電機除了又快又準外,我們對它的余下要求就是過載能力強,即“狠”了。為什么伺服電機要求過載能力強?由于伺服電機在機器人上主要
2016-09-19 21:33:55
機器人的優缺點有哪些?機器人是由哪些部分組成的?
2021-10-11 07:51:29
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
第二章 機器人系統與控制需求簡介2.1 工業機器人的系統組成機械本體:精密減速機、伺服電機、伺服驅動器、控制系統(核心零部件)控制柜示教盒2.2 機器人本體結構與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
機器人舵機調試系統,文章目錄什么是舵機?伺服控制硬件連接舵機規格SG90MG90SMG996R總結什么是舵機?舵機是伺服電機的一種,伺服電機就是帶有反饋環節的電機,我們可以通過伺服電機進行精確的位置
2021-07-12 08:43:10
響應市場要求,加強在國際市場的競爭能力。 視覺是人類獲取信息最重要的來源。人看到一幅圖像,馬上能夠理解圖像的內容和含義。然而,機器視覺并非易事。現有的機器人主要還是以壓力傳感器、位置傳感器等產業傳感器
2015-01-23 15:02:27
這一變化的因素- 無論是比喻含義還是字面含義 - 是使您的現代掃地機器人流暢運行的一個器件 - 電機驅動。如同今天的家用機器人助手一樣,電驅動的尺寸持續縮小,同時性能也在提高。在本文中,我將回顧真空機器人
2022-11-09 07:39:38
ABB機器人伺服電機維修常見故障是什么?
2021-09-29 06:48:18
型號,同一配置。則可以共享RAPID程序和EIO文件,但共享后也要進行驗證方可正常使用。6、什么是機器人機械原點?機械原點在哪里?解析:機器人六個伺服電機都有一個唯一固定的機械原點,錯誤的設定機器人
2020-08-19 10:32:02
ABB焊接機器人伺服電機維修常見故障有哪些?
2021-09-30 07:02:58
廣州市長科自動化設備有限公司提供ABB機器人維修,保養,培訓,機器人配套備件維修銷售及回收ABB機器人備件,代理銷售原裝正品ABB機器人及備件。伺服電機是指在伺服系統中控制機械元件運轉的發動機
2021-06-28 08:48:55
廣州市長科自動化設備有限公司提供ABB機器人維修,保養,培訓,機器人配套備件維修銷售及回收ABB機器人備件,代理銷售原裝正品ABB機器人及備件。伺服電機是指在伺服系統中控制機械元件運轉的發動機
2021-06-28 09:20:33
KUKA庫卡C4機器人驅動器故障報警維修庫卡機器人維修內容包括庫卡機器人示教器維修,KUKA伺服驅動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業電腦維修,庫卡機器人電路板維修,庫卡機器人
2021-09-17 07:09:52
、加減速輪廓控制等等,其主要作用在于降低整體系統運動控制的路徑誤差;伺服驅動器負責伺服電機的位置控制,其主要作用在于降低伺服軸的追隨誤差。機器人的伺服系統由伺服電機、伺服驅動器、指令機構三大部分構成
2020-09-02 14:36:11
KUKA焊接機器人伺服電機常見故障及維修處理1、庫卡機器人伺服電機的基本檢查由于庫卡機器人伺服電機內含有精密檢測器,因此,當發生碰撞、沖擊時可能會引起故障,在對庫卡機器人伺服電機維修時應作如下檢查
2020-09-26 16:51:21
項目名稱:機器人運動控制板(電機控制)項目試用計劃:本人目前從事機器人嵌入式軟件開發,專注于電機控制,實現電機運動控制算法,由于公司機器人運動邏輯越來越復雜,包含多個運動電機(步進伺服、伺服),目前
2018-01-22 10:32:40
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
學科為一體,能夠自動進行房間地面的家庭衛生服務。在一些發達國家的很多公共場合已經開始使用清潔機器人,隨著清潔機器人性價比的提高,清潔機器人進入家庭成為可能。
2019-09-05 06:56:37
可穿戴型下肢助力機器人是輔助型康復機器人的一種,是一種幫助人們擴展下肢運動能力的助力裝置,其基本原理是在基于人體運動行為意識信息的基礎上,由安裝在腿部關節(髖關節及膝關節)處的伺服電機驅動關節運動
2020-04-27 08:04:05
在通訊速率不改變的前提下,如何能提高從串口接收數據,分析數據,發送數據的響應速度呢?因為接收的數據都有時序要求,不方便用多線程將收發分開,經常出現響應不及時的問題導致上位機要求重新連線,盼高人指點。
2019-09-16 09:59:18
工業機器人的四大特征是哪些?工業機器人是由哪些部分組成的?工業機器人是怎樣進行劃分的?
2021-10-11 09:10:17
機器人是先進的機電一體化數字化裝備,集機械、電子、控制、計算機、傳感器、人工智能等多學科高新技術于一體,技術附加值很高。對提高產品的質量與產量、保障人身安全,改善勞動環境,減輕勞動強度,提高
2015-09-02 14:03:18
。這對協作機器人的感知、控制都要求很高。成本低協作機器人面向中小企業,盡可能低的成本是非常重要,但往往成本低性能也會隨之降低,如果在控制成本的同時提高性能,是相對較難的。3不可或缺——伺服和傳感器協作
2018-10-12 11:02:18
發那科機器人伺服電機維修1、發那科機器人伺服電機維修:軸承過熱故障原因①滑脂過多或過少;②油質不好含有雜質;③軸承與軸頸或端蓋配合不當(過松或過緊);④軸承內孔偏心,與軸相擦;⑤電動機端蓋或軸承蓋未
2020-08-14 09:51:48
服務機器人。本作品通過傾角傳感器來捕獲載物平面傾斜的信息,利用伺服電機調節機器人支撐點高度,從而使載物平面維持在平衡面。該作品的研發具有廣泛的應用前景,如醫療方面運送急救病人,抗震救災時快速運送受傷群眾
2013-10-31 13:05:45
設計一個FPGA解碼電路,電路有信號采集轉化電路,濾波放大電路,還有FPGA的解算部分,除了在FPGA解算中提高系統響應速度,還可以通過改善其他元器件使系統響應速度提高嗎?
2016-09-08 17:58:23
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統的研究是機器人領域中的重要內容之一,其研究成果可應用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
的、多用途的操作機。其工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。多軸機器人又稱單軸機械手,工業機械臂,電缸等,是以XYZ直角坐標系統為基本數學模型,以伺服電機、步進電機為驅動的單軸機械臂為
2020-07-29 06:57:04
DNS負載均衡的技術,判斷用戶來源就近訪問cache服務器取得所需的內容,解決Internet網絡擁塞狀況,提高用戶訪問網站的響應速度,如同提供了多個分布在各地的加速器,以達到快速、可冗余的為多個網站
2009-04-02 19:43:00
的響應速度要快,控制精度要高。而“狠”字又怎么解呢?其實大家仔細想想,伺服電機除了又快又準外,我們對它的余下要求就是過載能力強,即“狠”了。為什么伺服電機要求過載能力強?由于伺服電機在機器人上主要用于驅動
2018-10-15 10:16:14
;小型直流電機一般運行在高速低轉矩運行范圍內,這與機器人中電機驅動要求是矛盾的;機器人領域通常要求電機運行在低速大轉矩范圍內;因而,為了降低電機轉速同時提高電機轉速,一般在電機與輸出軸之間增加軸系,即
2018-10-19 10:31:20
如何選擇掃地機器人的電機?
2021-03-02 07:05:22
安川機器人伺服電機維修,常見機器人伺服電機故障和維修方法1、安川機器人伺服電機在很低的速度運行時,時快時慢,象爬行 一樣,怎么辦? 伺服電機出現低速爬行現象一般是由于系統增益太低引起的, 請調 整
2020-06-30 17:54:21
[本系列文章還將陸續介紹其他的傳感器模塊,歡迎訂閱我的博客] 本次所介紹的是伺服電機模塊,主要參考《基于ARM Cortex-M3的STM32系列嵌入式微控制器應用實踐》內的對機器人的伺服電機模塊
2021-06-28 08:36:59
,將從驅動器、電機和本體三個部分來介紹。1、伺服驅動層機器人關節的驅動是由電機完成的,作為機器人運動控制的最底層,伺服驅動的目的是改善驅動器的動態特性,提高伺服和抗擾性能。常說的三環控制(位置環、速度環
2021-06-28 09:29:31
工業機器人中應用的先決條件。工業機器人對于關節驅動電機的主要要求一般有如下幾點。 1.快速性 電動機從獲得指令信號到完成指令所要求的工作狀態的時間應短。響應指令信號的時間愈短,電伺服系統的靈敏性愈高
2015-01-23 14:33:53
(1)氣動式工業機器人這類工業機器人以壓縮空氣來驅動操作機,其優點是空氣來源方便,動作迅速,結構簡單造價低,無污染,缺點是空氣具有可壓縮性,導致工作速度的穩定性較差,又因氣源壓力一般只有6kPa左右
2017-12-01 10:47:32
國內減速器、伺服電機市場需求廣闊。一般而言,一套工業機器人的一個手臂需要配備一個減速器和伺服電機,那一套工業機器人需要配備4-6個減速器/伺服電機和1套控制系統。根據世界機器人協會的預測
2018-03-21 20:43:41
、信號處理部分等電路,國產品牌已經掌握;軟件部分主要是控制算法、二次開發等。國產品牌在穩定性、響應速度、易用性等還有差距。國內機器人廠商如廣州數控、廣泰數控、埃斯頓等均研發了控制器與控制系統。2. 本體
2017-08-23 15:10:27
`工業機器人的核心部件包括機器人本體、減速器、伺服電機、控制系統等四大部分,這4部分分別占總成本的22%、24%、36%、12%。 筆者從中國國際機器人展覽會上了解到,目前新時達(002527
2015-02-12 10:17:59
與被驅動的桿件相連,結構緊湊,剛度好,響應快,伺服驅動具有較高的精度。缺點:需要增設液壓源,易產生液體泄漏,不適合高、低溫場合,故液壓驅動目前多用于特大功率的機器人系統。選擇適合的液壓油。 防止固體
2018-10-12 10:16:22
庫卡機器人伺服電機維修常見故障現象有什么?怎么維修?
2021-11-12 07:27:24
和定點轉彎等步態,實現六足機器人的姿態控制。系統使用RF24L01射頻模塊進行遙控。為提高響應速度和動作連貫性,六足機器人的驅動芯片采用ARM Cortex M4芯片,基于μ/cos-II操作系統,遙控器部分采用的是友善之臂的ARM9板子,處理器S3C2440,基于Linux系統。
2020-10-10 09:57:11
電機的要求非常嚴格,因而對伺服驅動系統的要求也很嚴格,作為微型機器人的核心部件——超聲波電機有以下優勢:]1、響應速度快,超聲電機伺服系統的靈敏性越高,快速響應性就越好。2、起動轉矩慣量比大,在驅動負載
2020-11-02 11:21:13
:]1、響應速度快,超聲電機伺服系統的靈敏性越高,快速響應性就越好。]2、起動轉矩慣量比大,在驅動負載的情況下,要求機器人的伺服電機的起動轉矩大,轉動慣量小。]3、體積小、質量小、軸向尺寸短,以配合機器人的體形;]4、能經受得起苛刻的運行條件,可進行十分頻繁的正反向和加減速運行。
2020-11-24 11:30:02
的響應速度要快,控制精度要高。而“狠”字又怎么解呢?其實大家仔細想想,伺服電機除了又快又準外,我們對它的余下要求就是過載能力強,即“狠”了。1.1為什么伺服電機要求過載能力強?由于伺服電機在機器人上主要
2018-10-19 10:47:11
減小伺服電機共振的方法是什么?怎樣消除機器人運動產生的異響從而保持伺服的精度呢?
2021-09-27 08:30:04
給我們講用I/O接口控制伺服電機、伺服機調零、脈寬控制電機的速度和方向等基礎內容。有了前面的基礎知識,對機器人有了一個嶄新的認識,隨后,老師開始給我們布置一些小任務。第一任務是采用函數調用的方法走正方形
2015-08-05 22:49:58
的桿件相連,結構緊湊,剛度好,響應快,伺服驅動具有較高的精度。缺點:需要增設液壓源,易產生液體泄漏,不適合高、低溫場合,故液壓驅動目前多用于特大功率的機器人系統。選擇適合的液壓油。 防止固體雜質混入
2018-10-30 15:02:58
驅動的桿件相連,結構緊湊,剛度好,響應快,伺服驅動具有較高的精度。缺點:需要增設液壓源,易產生液體泄漏,不適合高、低溫場合,故液壓驅動目前多用于特大功率的機器人系統。選擇適合的液壓油。 防止固體雜質
2018-10-30 15:11:29
關于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
吸塵機器人作為服務機器人領域的一個新產品,結合了機器人和吸塵器技術,能在無人看守情況下輕松地完成室內環境的吸塵等清潔工作,越來越受到人們的歡迎。
2020-03-18 06:18:37
智能搬運機器人能實現小型柱狀物料顏色識別及搬運,能夠輕松完成中國教育機器人大賽的智能搬運競賽任務。機器人的移動由兩輪伺服電機驅動,萬向輪協助轉向,并用多個循線傳感器輔助完成復雜路線導航,前置超聲波
2016-03-24 10:32:24
信號驅動,其伺服電機本身就可以實現調速。桁架機器人的伺服電機和驅動部件,目前歐系的品牌主要有倫茨,Lust,博世力士樂等,這些歐系電機及驅動部件過載能力及動態響應好,驅動器開放性強,且具有總線接口
2018-11-22 12:08:23
常用的電機有哪些。機器人常用的電機包含三種:普通的直流電機、伺服電機、步進電機。直流電機1.直流電機輸出或輸入為直流電能的旋轉電機,稱為直流電機,它是能實現直流電能和機械能互相轉換的電機。當它作電動機
2018-10-25 11:50:39
數控系統,PLC,工控機加運動控制卡和帶軸卡功能及I/O口的驅動電機。 10.技術協議 每臺機器人都有運行速度,重服定位精度和各種特定功能等技術要求,在簽合同時務必要簽訂技術協議,驗收內容和驗收方式等。
2017-08-16 11:31:54
,加裝減速機等傳動組織提高負載才能。2、工業機器人伺服電機在有脈沖輸出時不工作 監督操控器的脈沖輸出當時值以及脈沖輸出燈是否閃爍,承認指令脈沖現已履行并現已正常輸出脈沖;查看操控器到驅動器的操控電纜
2020-10-27 11:12:09
我是新人,求幫助啊,明天需要提交輪式機器人應用的報告,求大神給點建議,可用輪式機器人應用于那些方面,要求實際可行,應用于生活,農業,軍事都可以,謝謝啦
2013-04-17 16:32:16
的最大扭矩,扭矩與速度曲線;電機運行的精度和可重復性(不使用傳感器和閉環控制)。當然,電機選擇還涉及許多其他性能因素,還有尺寸,重量和成本因素。對于幾乎所有小到中等大小的機器人執行器,為執行器供電的最常
2019-03-12 15:52:12
江智黨建機器人是經過多年的市場沉淀 ;現已可以提供系統 全方位的黨建機器人服務
2022-06-21 07:59:59
RDM協作機器人關節伺服驅動模塊是一款基于FPGA 先進技術開發而成的高性能、直流供電、結構極其緊湊的全數字通用伺服驅動器,最大功率可達 1000W。通過EtherCAT/CANopen
2023-04-17 18:13:06
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
RDM協作機器人關節伺服驅動模塊是一款基于FPGA 先進技術開發而成的高性能、直流供電、結構極其緊湊的全數字通用伺服驅動器,最大功率可達 1000W。通過EtherCAT/CANopen 總線控制
2023-04-19 15:39:40
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
介紹了一種基于DMA控制器的SoC系統架構,解決因使用DMA控制器而導致的處理器異常響應不能及時得到處理的問題,使處理器更加快速地響應異常請求,提高系統的響應速度,使系統
2012-05-22 10:02:58 1055
1055 
關鍵在于機器人的核心零部件——伺服電機。機器人在運行過程中,是通過伺服電機的驅動實現多自由度的運動的。如果對機器人運行的動作速度、精度要求高的話,實際就是要求伺服電機的響應速度、控制精度要足夠高。
2018-03-23 12:40:001800 AN-405:提高AD606的輸出響應速度
2021-04-25 11:31:48 7
7 近年來,伺服電機依托工業機器人產業發展,應用市場增速迅猛,但市場競爭激烈、總體穩定。在機器人產業中,伺服電機不論從技術和成本上,均為不可或缺的一環。那么機器人伺服電機如何選型呢?
2021-06-09 17:17:517 電子發燒友網站提供《伺服電機避障機器人.zip》資料免費下載
2023-02-08 10:02:570 抓取機器人需要對物體進行高精度、高速度的抓取和放置,因此需要使用高性能的伺服電機來實現精準的運動控制。相比于其他類型的電機,伺服電機具有以下優點,適合應用于抓取機器人中: 1、伺服電機可以實現高精度
2023-06-15 09:15:02377 機器人在運行過程中,是通過伺服電機的驅動實現多自由度的運動的。如果對機器人運行的動作速度、精度有比較高的要求,實際就要求伺服電機的響應速度、控制精度要足夠高。因此,在選擇伺服電機的時候,一定要掌握步驟,把握要點。
2023-08-03 10:31:17942 訊維無縫切換矩陣是一種基于云計算的技術,可以通過優化音視頻處理和傳輸,提高應用程序的響應速度。以下是幾種方法: 優化視頻編解碼:訊維無縫切換矩陣可以采用先進的視頻編解碼算法,對視頻進行壓縮和優化
2023-08-31 16:23:29287 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論