 電子發燒友App
電子發燒友App


基于TMS320LF2407A DSP的PFC級電路的原理與設計
1、引言
帶A/D轉換器(ADC)和脈沖寬度調制器(PWM)等集成外設的低成本高性能數字信號處理器(DSP),已在電機控制、不間斷電源(UPS)和運動控制等領域獲得比較廣泛的應用。低成本DSP在控制電源變換功能方面,為電源設計者提供了新的工具。
與傳統模擬控制比較,DSP控制器具有許多突出的優點,例如多平臺標準硬件設計、對老化和環境變化的低敏感度、優異的抗噪擾性、易于履行高級控制算法、設計變更的靈活性及控制和通信功能的單芯片解決等。然而,在電源設計中使用DSP,對許多模擬設計者來說面臨新的挑戰,他們必須盡力改變設計,以適應新的數字環境。
本文以由德州儀器TMS320LF2407A 16位定點DSP控制的平均電流型功率因數校正(PFC)升壓變換器為例,來說明與傳統模擬設計方案存在的不同。在模擬控制領域不同的控制環路參數,必須重新定義到它們的數字履行上,然后進行環路分析,并給出要求的電壓和電流環路補償器,最后介紹這些補償器的分立化及它們在軟件中的執行。通過PFC級數字控制器設計為例,可以識別模擬與數字控制之間的基本區別。
2、TMS320LF2407A控制的PFC級電路
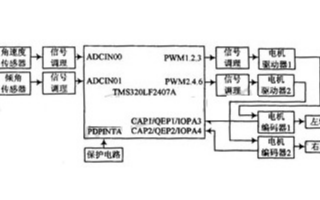
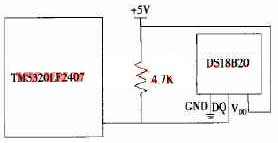
圖1所示為由TMS320LF2407A控制的PFC級電路。該拓撲是一種AC-DC升壓變換器,為履行控制算法(algorithm),需要三個信號,即整流的輸入電壓Vin、電感器電流Iin和DC總線(輸出電容Co)電壓V。
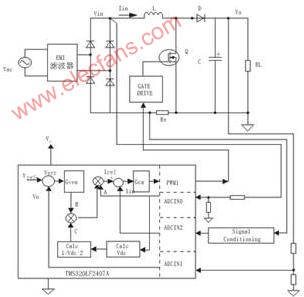
圖1? TMS320LF2407A控制的PFC級電路
變換器由兩個反饋環路控制:平均輸出電壓由較慢響應的外環調節,而整形輸入電流的內環響應速度比外環快得多。瞬時信號Vin、Iin和Vo通過各自的電壓和電流感測電路被檢測,檢測信號經三個數模轉換器(ADC)信道反饋到DSP。這三個ADC通道分別是ADC/NO、ADCIN1和ADCIN2。這些信號的速率利用ADC控制環路的采樣頻率fs感測和轉換。數字化感測的總線(bus)電壓Vo與期望的參考總線電壓Vref相比較,爾后將差分信號(Vref-Vo)饋入到電壓環路控制器Gvea。數字化控制器Gvea的輸出“B”與其它兩個信號“A”和“C”相乘,為內部電流環路產生參考電流命令。在圖1中,“A”代表感測的數字瞬時信號Vin。“C”可由下式確定:
?
式中,Vdc是計算的感測數字化信號Vin的平均成分。在圖1中的Iref是內部電流環路的參考電流命令,Iref具有經整流的正弦波形狀,其幅度對于負載和AC線路電壓的變化足以保持輸出電壓在一個參考電平Vref上。感測的數字化電感電流Iin與參考電流Iref進行比較,Iref與Iin之差值進入電流控制器Gca。Gca的輸出最后為PFC開關產生PWM占空比命令。
3、PFC級數字控制器設計
圖1所示的DSP控制的PFC變換器控制環路框圖如圖2所示。圖中,Kf、Ks和Kd增益塊替代了先前各自的電壓和電流感測與調節電路。乘法器增益Km也加進控制單元中。Km允許參考信號Iref根據變換器輸入工作電壓范圍進行調節。內部電流環路利用Iref來編程,電流環路功率級輸入占空比命令是電感電流Iin。電流控制器Gca產生適當的控制輸出Uca,致使Iin跟隨Iref。電壓控制器Gvea輸出Unv輸入到電壓環路功率級,其輸出是總線電壓Vo。Gvea產生適當的Unv控制Iref的幅值,使Vo保持在參考電平上。德州儀器(TI)公司生產的TMS320LF2407A是一種16位定點(fixed-point)DSP控制器,被用作控制通用輸入(85~265Vac)平均電流模式PFC預變換器。

圖2? TMS320LF2407A控制的PFC級控制環路框圖
3.1? 電壓與電流感測增益
輸入電壓Vin和輸入電流Iin分別表示為
Vin=Vm Sin2wt????? 0≤Vm≤Vmax
Iin=Im sin2wt????? 0≤Im≤Imax
式中:Vmax為峰值幅度Vm最大值,V;Imax為峰值幅度Im的最大值,A。
基于DSP的PFC變換器信號通過芯片上的A/D轉換器感測。為使這些信號進入A/D轉換器的范圍之內,利用適當的外部調節電路加至每個通道。用戶軟件讀出變換的信號,即數字化信號。從ADC結果寄存器讀出的數字化信號,用適當的定點格式保存在臨時存儲器單元。數字化信號用有限的字長被表示為數值。在16位DSP中,最低位(LSB)用作表示信號的尾數,最高位(MSB)用作代表其符號。為了實現轉換,需要選擇信號的范圍,然后在定點表示的整個范圍之內標記變化結果的全部范圍。對于TMS320LF2407A DSP,正向信號的范圍是從0到32767。一旦這個映像完成,下一步則是為這些數字化信號選擇適當的定點算法計數法。對于16位DSP,利用Q15計數法作為這些信號的定點表示是有利的。用這種表示方法,數值在0~32767范圍之內,表示絕對值在0與1之間。用Q15計數法,電壓和電流相對于它們的最大值作為規格化的每單位(pu)數值被自動保存。
在圖2中,前饋電壓感測增益Kf、電流感測增益Ks和PFC輸出直流總線電壓感測增益Kd分別表示為:
??? Kf=1/Vmax
Ks=1/Imax
Kd=1/Vo(max)
式中,Vmax為整流的輸入電壓Vin最大允許幅值,V;Imax為輸入電流Iin的最大允許幅值,A;Vo(max)為直流總線電壓最大允許值,V。
3.2? 輸入電壓前饋軟件的實現
輸入電壓前饋能使輸入功率保持在規定的電平上,不隨AC線路電壓波動而變化。
為計算輸入電壓Vin的平均成分Vdc,需要計算信號頻率f(=1/t),然后對一個周期上的信號進行積分,如圖3示圖所描述。
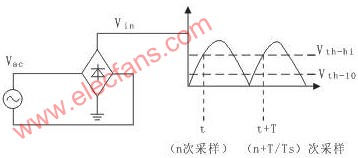
圖3 和Vin平均成分的計算
3.2.1? 頻率計算
在頻率軟件執行期間和其后的平均Vin的計算,每當信號跨越上門限Uth-hi時,Vin的采樣數(N)被計數并被保存。信號的下門限Uth-Io用于獲得抗擾度。若采樣周期為Ts,采樣頻率為fs=1/Ts。Vin的周期為T,N=T/Ts。若N為已知數,每單位(per unit, Pu)頻率fpu的計算公式是:
?
式中,fmax為Uin的最大頻率,Hz;Nmin為Uin一個周期上的采樣最小數。計算頻率的用戶軟件利用N值,首先計算中間值1/N,然后與Nmin相乘得到fpu值。為保存1/N值,并帶最高精度,不引起累加器溢出,知道Nmin值是很重要的。為此,用戶應當選擇信號最大頻率以被測量。一旦知道Nmin值,1/N量可以被保存,并帶最大精度且用適當的定點表示。例如,對于一個輸入工作頻率為47~63Hz的PFC變換器,最大輸入頻率可以選擇70Hz。然后用fmax=140Hz(兩倍的輸入頻率)和已知的Ts值來計算Nmin,是非常容易的。
3.2.2? 前饋成分計算
只要知道信號Vin的頻率,它的平均成分Vdc可用下面公式計算: ?
?
式中,T為相應于Uin頻率f的時間周期, S;Vin(i)為Vin的數字化i次采樣。
由于Vin作為相對于它的最大值Vmax的每單位(pu)規格化值被測量,所計算的Vdc值也是一個帶Vmax規格化基本值的每單位(pu)量值。對于一個正弦波輸入電壓,Vac的最大值僅為2Vmax/π。因此,在Vac的固定點表示中,為獲得最佳精度,先前計算的值相對于它自己的最大值被轉換為每單位規格化量值,這個值由下式給出: ?
?
Vdc1的倒置電壓Vinv(即Vinv=1/Vdc1)在Vdc1最小時值最大,反之亦然。為在Vinv固定點表示中獲得較高的精度,需要用相對于其最大值的每單位(pu)規格化值來表示。對于一個正弦波輸入電壓,Vdc的最小值是2Vmin/π。輸入電壓最小幅值Vmin的選擇,基于PFC變換器的輸入電壓范圍。例如:若PFC變換器的低線路RMS電壓是90V,Vmin值應低于或等于127V( )。Vinv的最大值為(Vminπ/2),相對于它自己最大值的相應Vinv的每單位(pu)值為: ?
?
3.3? 乘法器增益Km
乘法器增益Km的調節,應能在最低輸入電壓上,當PFC變換器交付最大負載時,使參考電流Iref是在它的最大值上。在圖2中,Iref為
?
隨電流環路閉合,Iref可表示為
?
在最低工作電壓Vinv=1時,滿載下的電壓控制器輸出將在它的最大值上,即Vnv=1。因此,在最低工作電壓上,為產生最大參考電流,要求Km值為: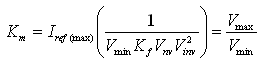
?
3.4? 電壓和電流環路補償器
電流環路功率級高頻近似值為:
?
根據圖2所示的PFC控制框圖,電流環路增益等式為:
?
式中,Fm為調制器增益, 
調制器在軟件中部分地執行,并部分地利用DSP PWM硬件。軟件利用調制器輸入,即電流控制器輸出Uca,計算在TMS320LF2407A中PWM硬件模塊的占空比值。PWM硬件利用占空比值,為PFC開關產生適當的PWM信號。當調制器輸入Uca是1時,軟件保證調制器輸出即PWM占空比為100%。在此情況下,調制器增益Fm=1。因此,對于電流環路的交越頻率fci,需要的電流誤差放大器補償器可以表示為:
?
只要電流環路閉合,電壓環路功率級傳輸函數可按下式計算:
?
式中,Zf為輸出電容CO和負載阻抗ZO組成的并聯分支的等效阻抗,Zf=ZO/(1+sCOZO);負載阻抗  。
。
圖2中電壓環路增益等式如下:
電壓環路交越頻率fcv需要的電壓誤差放大器補償器為
?
3.5? 電壓和電流環路補償器軟件的實現
先前給出的電壓和電流環路控制器,在它們利用TMS320LF2407A在軟件中被執行之前,被變換為如下說明的等效數字形式,電流控制器可以寫為:
?
式中:KP為已計算的電流補償器量值;E為電流誤差信號。
電流環路補償波德(Bode)曲線如圖4所示。其中:頂部為電流環路控制單元增益Gid、Fm和KS曲線;中間為補償器Gca增益曲線;底部為所期望的環路增益Ti曲線。功率級有一個-1的斜率,在期望的穿越頻率fci上放置零點fz,可以產生一個45°的相補角。然而,由于控制環路采樣和補償延時,相補角的一部分被損失,因此將fz放置到圖4所指示的位置,以補償相補角損失。
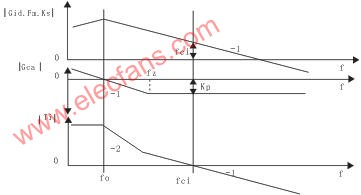
圖4? 電流環路補償波德曲線
4、PFC級數字控制器設計實例
在本設計中的系統參數如下:
輸出功率PO=825W,DC總線電壓VO=380V,開關頻率fSW=120KHz,數字環路采用頻率fS=60KHz,L=100μH,C=390μF,fCV=10Hz,fci=8KHz,輸入電壓最大頻率fmax=200Hz,Vmax=410V,Vmin=109.95V,Vo(max)=410V,輸入電流最大值Imax=2PO/Vmin=15A。
各種增益參數分別為:kf=1/410,kd=1/410,KS=1/15,Km=410/109.95=3.7286。
4.1? 電流控制器履行例子
由于fci=8KHz,電流控制器量值為
?
將電流環路PI補償器零點設置在800Hz,電流補償器的積分時間常數為TIC=1/2π×800=198.94×10-6。因此,完整的電流環路控制器為
?
式中:KPi=0.1985,Kli=997.77。
分立(discrete)控制器執行等式為
Ui(n)=K0i?Ei(n)+li(n-1);
li(n)=li(n-1)+K1i?Ei(n)+Kcorri?Epii
Epii=Usi-Ui(n)
式中:當 在其它情況下,
在其它情況下,
電流控制器相關系數為 。
。
電流控制器相關系數為
? 控制器履行的代碼段如下:

4.2? 電壓控制器履行例子
PFC變換器負載阻抗為: 。
由于fCV=10Hz,電壓控制器量值為GVEA=4.7517。
電壓環路PI補償器零點設置在10Hz,積分時間常數為:T1V=1/2π×10=15.9155×10-3。因此,完整的電壓環路控制器為
?
式中,KPV=4.7517,KIV =298.56。
控制器履行等式如下:
Uv(n)=K0v?Ev(n)+Iv(n-1)
Ivi(n)=Iv(n-1)+K1v?Ev(n)+Kcorrv?Epiv
Epiv=Usv-Uv(n)
式中,當
電壓控制器的相關系數為
? 式中 。
。
電壓控制器的履行代碼段寫法與電流控制器相同。
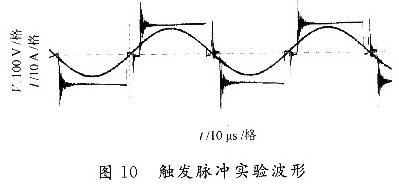
4.3? 實驗結果
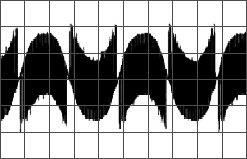
在224Vrms輸入電壓下的PFC變換器輸入電流波形如圖5(a)所示,圖5(b)所示為在100Vrms輸入電壓時的輸入電流波形。從輸入電流波形可以看出,其形狀趨于標準正弦波,而且與輸入電壓趨于同相位,因而實現了功率因數校正。

圖5? 輸入電流和電壓波形(a)224V輸入;(b)100V輸入
5、結束語
采用DSP的PFC變換器設計不同于傳統模擬控制設計方案,不同控制環路參數必須從模擬控制重新定義到它們的數字的履行,許多具有模擬控制經驗的工程師為適應從模擬到數字環境的轉變面臨新的挑戰。











 工商網監
工商網監
評論