 電子發(fā)燒友App
電子發(fā)燒友App


基于CAN總線和DSP的起重機(jī)多功能安全監(jiān)控系統(tǒng)
介紹了一種基于數(shù)字信號(hào)處理器ADSP2105和現(xiàn)場(chǎng)總線技術(shù)的起重機(jī)多功能安全監(jiān)控系統(tǒng)。該系統(tǒng)由最小系統(tǒng)節(jié)點(diǎn)、智能節(jié)點(diǎn)和主節(jié)點(diǎn)等模塊組成。各模塊之間的通信利用控制器局域風(fēng)(CAN)完成。該系統(tǒng)具有人機(jī)界面友好、保護(hù)功能完善、可靠性高等特點(diǎn),并具有一定的自診斷功能。
??? 關(guān)鍵詞:安全監(jiān)控 數(shù)字信號(hào)處理器ADSP2105 控制器局域網(wǎng)(CAN)
起重機(jī)是工程建設(shè)中的必要設(shè)備之一,在施工中應(yīng)用相當(dāng)廣泛。然而,起重機(jī)潛在的危險(xiǎn)因素也較多,容易發(fā)生惡性事故。國(guó)家技術(shù)監(jiān)督局先后專門制定和發(fā)布了《起重機(jī)設(shè)計(jì)規(guī)范》(GB3811-83)、《起重機(jī)械超載保護(hù)裝置安全技術(shù)規(guī)范》(GB12602-90)、《起重機(jī)安全規(guī)程》(GB6067-85)等標(biāo)準(zhǔn),要求各類起重機(jī)械必須裝備安全保護(hù)裝置。因此開發(fā)新型的起重機(jī)多功能安全監(jiān)控和保護(hù)系統(tǒng)是很有必要的。基于此,近年來國(guó)內(nèi)外先后研制出一些起重機(jī)安全保護(hù)裝置,如載荷限制器、力矩限制器、起升高度儀、防碰撞裝置、風(fēng)速報(bào)警器等。但它們功能單一,如果需要多種保護(hù)功能,必須安裝多臺(tái)儀器,這樣不僅價(jià)格昂貴,也給維護(hù)和使用帶來了不便。起重機(jī)用戶迫切需要一種集多種功能于一體的多功能安全監(jiān)控系統(tǒng),并希望起重機(jī)具有較強(qiáng)的自動(dòng)控制功能主自診斷能力,以降低操作和維護(hù)的勞動(dòng)強(qiáng)度并保證起重機(jī)的安全。
起重機(jī)用戶關(guān)心的涉及到安全方面的工況參數(shù)主要有:主鉤與副鉤的起重載荷和起升高度、主臂與副臂(塔臂)的起重力矩和起升角度、工作幅度、鋼絲繩狀況、風(fēng)速(力)大小、起重過程中載荷振動(dòng)情況以及下陣的各種信息(如變幅油缸壓力、液壓傳動(dòng)系統(tǒng)的壓力、溫度、發(fā)動(dòng)機(jī)轉(zhuǎn)速參數(shù)、油溫)等。如何對(duì)這些工況參數(shù)進(jìn)行巡回采集、算法處理,并實(shí)時(shí)輸出控制和提示是本系統(tǒng)設(shè)計(jì)的關(guān)鍵所在。
??? 近年來,現(xiàn)場(chǎng)總線技術(shù)、數(shù)字信號(hào)處理技術(shù)的不斷發(fā)展和漸趨成熟以及各種新型大規(guī)模集成器件的出現(xiàn),為本系統(tǒng)的實(shí)現(xiàn)奠定了技術(shù)和物質(zhì)基礎(chǔ)。
現(xiàn)場(chǎng)總線(Field Bus)標(biāo)準(zhǔn)及其技術(shù)是國(guó)際自動(dòng)控制領(lǐng)域關(guān)注的熱點(diǎn),對(duì)于工業(yè)控制領(lǐng)域,采用現(xiàn)場(chǎng)總線的最大優(yōu)點(diǎn)是可大量節(jié)約連接導(dǎo)線。維護(hù)費(fèi)用和安裝費(fèi)用,同時(shí),現(xiàn)場(chǎng)總線能夠傳送多個(gè)過程變量。控制器局域網(wǎng)(Controller Area Network)屬于現(xiàn)場(chǎng)總線的范疇,它是一種有效支持分布式控制(Distributed Controller)或?qū)崟r(shí)控制(Real-time Controller)的串行通信網(wǎng)絡(luò),是德國(guó)Bosch公司于1980年初為解決現(xiàn)代汽車中眾多的控制與測(cè)試儀器之間的數(shù)據(jù)交換而開發(fā)的一種串行數(shù)據(jù)通信協(xié)議,是一種通信速率可達(dá)1Mbps的多主總線(Multiple Master Multiple Slave,即M3S)。 CAN總線通信接口集成了CAN協(xié)議物理層和數(shù)據(jù)鏈路層功能,可對(duì)通信數(shù)據(jù)完成成幀處理。它通過對(duì)通信數(shù)據(jù)塊進(jìn)行編碼,保證了網(wǎng)絡(luò)內(nèi)節(jié)點(diǎn)個(gè)數(shù)的動(dòng)態(tài)性,并使不同的節(jié)點(diǎn)同時(shí)接收到相同的數(shù)據(jù)。數(shù)據(jù)段長(zhǎng)度最多為8個(gè)字節(jié),保證了通信的實(shí)時(shí)性;而協(xié)議利用CRC檢驗(yàn)提供相應(yīng)的錯(cuò)誤處理功能,則保證了數(shù)據(jù)通信的可靠性。本系統(tǒng)利用CAN總線的以上特性,解決了眾多模塊(節(jié)點(diǎn))之間的通信問題。
CAN總線通信接口集成了CAN協(xié)議物理層和數(shù)據(jù)鏈路層功能,可對(duì)通信數(shù)據(jù)完成成幀處理。它通過對(duì)通信數(shù)據(jù)塊進(jìn)行編碼,保證了網(wǎng)絡(luò)內(nèi)節(jié)點(diǎn)個(gè)數(shù)的動(dòng)態(tài)性,并使不同的節(jié)點(diǎn)同時(shí)接收到相同的數(shù)據(jù)。數(shù)據(jù)段長(zhǎng)度最多為8個(gè)字節(jié),保證了通信的實(shí)時(shí)性;而協(xié)議利用CRC檢驗(yàn)提供相應(yīng)的錯(cuò)誤處理功能,則保證了數(shù)據(jù)通信的可靠性。本系統(tǒng)利用CAN總線的以上特性,解決了眾多模塊(節(jié)點(diǎn))之間的通信問題。
數(shù)字信號(hào)處理器的出現(xiàn)使數(shù)字信號(hào)處理領(lǐng)域發(fā)了了革命性的變化。它采用了哈佛總線結(jié)構(gòu),數(shù)據(jù)總線和程序總線分離,可同時(shí)進(jìn)行指令的讀取和數(shù)據(jù)運(yùn)算,指令基本上可以在一個(gè)機(jī)器周期內(nèi)執(zhí)行,片裝乘法器硬件,具有將乘法器和累加器以流水線方式連接的總線,能高速進(jìn)行連續(xù)的乘法運(yùn)算和累加運(yùn)算。因而其運(yùn)算能力極強(qiáng),適合于大量高速信號(hào)的處理領(lǐng)域,自從問世以來,在短短不到20年的時(shí)間內(nèi),便迅猛發(fā)展,得到了極為廣泛的應(yīng)用。以Texas Instruments公司的TMS系列為例,到目前已發(fā)展到第五代。
1 系統(tǒng)總體結(jié)構(gòu)簡(jiǎn)圖
本系統(tǒng)基本組成如圖1所示。系統(tǒng)由一個(gè)主節(jié)點(diǎn)(中央處理單元)、一個(gè)智能節(jié)點(diǎn)和8個(gè)最小系統(tǒng)節(jié)點(diǎn)組成。最小系統(tǒng)節(jié)點(diǎn)包括拉力傳感器節(jié)點(diǎn)1(副鉤)、角度傳感器節(jié)點(diǎn)2(副臂)、拉力傳感器節(jié)點(diǎn)3(主鉤)、角度傳感器節(jié)點(diǎn)4(主臂)、風(fēng)力傳感器節(jié)點(diǎn)5、防碰撞傳感器節(jié)點(diǎn)6、高度傳感器節(jié)點(diǎn)7(主鉤)、高度傳感器節(jié)點(diǎn)8(副鉤)等,各節(jié)點(diǎn)分別負(fù)責(zé)采集不同的牧師信號(hào),并進(jìn)行A/D轉(zhuǎn)換(個(gè)別節(jié)點(diǎn)則不用進(jìn)行A/D轉(zhuǎn)換,如高度節(jié)點(diǎn)的增量式光電編碼盤可直接得到數(shù)字信號(hào)),然后通過現(xiàn)場(chǎng)總線與主節(jié)點(diǎn)通信。各模塊之間的最大總線長(zhǎng)度不超過130米,位速率定為500kbps,總線定時(shí)為:BTR0,01H;BTR1,1CH。
1.1 主節(jié)點(diǎn)(中央處理單元)
系統(tǒng)主節(jié)點(diǎn)結(jié)構(gòu)原理圖如圖2所示。 中央處理器采用美國(guó)模擬器件公司生產(chǎn)的ADSP2105。它是一種高性能價(jià)格比、性能成熟的DSP器件,在一個(gè)100ns周期內(nèi),可以完成如下操作:取兩個(gè)操作數(shù),修改指向操作數(shù)的地址單元,使兩個(gè)操作數(shù)相乘并將結(jié)果累加到一個(gè)40位的和中。由于程序循環(huán)在硬件內(nèi)完成,所以每100ns能執(zhí)行一次這些高級(jí)指令的操作。WSI的PSD311可編程外圍器件有效地將可編程邏輯、I/O端口和存儲(chǔ)器集成在一塊芯片上,可以實(shí)現(xiàn)本系統(tǒng)的外圍功能。ADSP2105在與PSD311等外圍器件聯(lián)絡(luò)方面提供了很大的時(shí)序靈活性。它可以為4個(gè)分開的存儲(chǔ)器空間中的每一個(gè)單獨(dú)分配等待狀態(tài)數(shù)量,以適應(yīng)很寬的時(shí)序差別。我們?cè)贏DSP2105的“等待寄存器”為EPROM、RAM和外部存儲(chǔ)器的選通脈沖安排1個(gè)等待狀態(tài),即200ns周期時(shí)間,以滿足PSD311 120ns器件的時(shí)序要求。由于總線的通路布在ADSP2105的里面,PSD311的數(shù)據(jù)線與D15~D8連接。ADSP2105的“D22”線提供PSD311的“A14”地址線,/BMS(Boot Memory Select)充當(dāng)EPROM的片選并與PSD311的“A19”輸入相連接。
中央處理器采用美國(guó)模擬器件公司生產(chǎn)的ADSP2105。它是一種高性能價(jià)格比、性能成熟的DSP器件,在一個(gè)100ns周期內(nèi),可以完成如下操作:取兩個(gè)操作數(shù),修改指向操作數(shù)的地址單元,使兩個(gè)操作數(shù)相乘并將結(jié)果累加到一個(gè)40位的和中。由于程序循環(huán)在硬件內(nèi)完成,所以每100ns能執(zhí)行一次這些高級(jí)指令的操作。WSI的PSD311可編程外圍器件有效地將可編程邏輯、I/O端口和存儲(chǔ)器集成在一塊芯片上,可以實(shí)現(xiàn)本系統(tǒng)的外圍功能。ADSP2105在與PSD311等外圍器件聯(lián)絡(luò)方面提供了很大的時(shí)序靈活性。它可以為4個(gè)分開的存儲(chǔ)器空間中的每一個(gè)單獨(dú)分配等待狀態(tài)數(shù)量,以適應(yīng)很寬的時(shí)序差別。我們?cè)贏DSP2105的“等待寄存器”為EPROM、RAM和外部存儲(chǔ)器的選通脈沖安排1個(gè)等待狀態(tài),即200ns周期時(shí)間,以滿足PSD311 120ns器件的時(shí)序要求。由于總線的通路布在ADSP2105的里面,PSD311的數(shù)據(jù)線與D15~D8連接。ADSP2105的“D22”線提供PSD311的“A14”地址線,/BMS(Boot Memory Select)充當(dāng)EPROM的片選并與PSD311的“A19”輸入相連接。
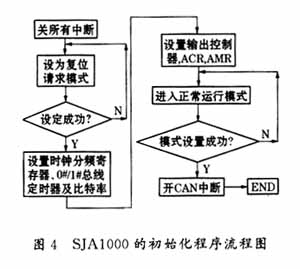
選用SJA1000作為CAN控制器,驅(qū)動(dòng)器使用CAN控制器接口芯片PCA82C250。EEPROM用作數(shù)據(jù)RAM,用于保存設(shè)置輸入的關(guān)鍵數(shù)據(jù),以防掉電時(shí)丟失。
1.2 智能節(jié)點(diǎn)
智能系統(tǒng)節(jié)點(diǎn)原理示意圖如圖3所示。Philips公司的80C592芯片是8位高性能微控制器,是現(xiàn)有80C522和CAN控制器PCA82C200的功能組合,并具有8路模擬量輸入通道的10位A/D轉(zhuǎn)換器和兩級(jí)優(yōu)先權(quán)的15個(gè)中斷源。PSD311用作其外圍ROM、RAM和譯碼芯片。80C52利用自帶的ADC將下車傳感器采集的各種模擬/數(shù)字信號(hào)轉(zhuǎn)換成數(shù)字信號(hào)(只對(duì)模擬信號(hào)),經(jīng)CAN部件送至系統(tǒng)主節(jié)點(diǎn);并接收主節(jié)點(diǎn) 來的輸出信號(hào),控制下車的各種繼電器和各種電磁閥。
1.3 最小系統(tǒng)節(jié)點(diǎn)
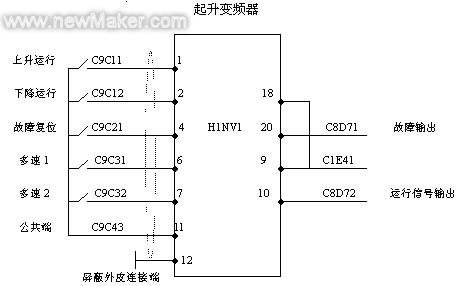
最小系統(tǒng)節(jié)點(diǎn)使用了ISO/DIS11898標(biāo)準(zhǔn)連接方法, 如圖4所示。P82C150是帶位速率自動(dòng)檢測(cè)和校正的包括CAN協(xié)議控制器的單片16位I/O器件。它的16條I/O口線的方向、數(shù)字與模擬方式均可編程選擇。自帶的包含6路模擬輸入通道的10位A/D轉(zhuǎn)換器具有0.1%的精度,完全可以滿足系統(tǒng)的精度要求。
如圖4所示。P82C150是帶位速率自動(dòng)檢測(cè)和校正的包括CAN協(xié)議控制器的單片16位I/O器件。它的16條I/O口線的方向、數(shù)字與模擬方式均可編程選擇。自帶的包含6路模擬輸入通道的10位A/D轉(zhuǎn)換器具有0.1%的精度,完全可以滿足系統(tǒng)的精度要求。
2 系統(tǒng)功能和特性
系統(tǒng)能夠?qū)崟r(shí)對(duì)各路傳感器信號(hào)進(jìn)行巡回采樣,經(jīng)過計(jì)算得出相應(yīng)工況下的起重機(jī)實(shí)際工況參數(shù),并與標(biāo)準(zhǔn)工作參數(shù)比較,當(dāng)達(dá)到極限值的90%的預(yù)報(bào)警,超過100%時(shí)報(bào)警,并強(qiáng)制停止控制。這時(shí)起重機(jī)不能繼續(xù)向危險(xiǎn)方向動(dòng)作,如趴桿、伸臂、起升等。系統(tǒng)還提供了友好的人機(jī)界面,用戶可以方便地完成特定的工作參數(shù)設(shè)置及調(diào)試、標(biāo)定等輔助功能,根據(jù)顯示屏幕和語音提示實(shí)時(shí)了解相關(guān)的工況參數(shù),以便及時(shí)作出相應(yīng)的操作。
系統(tǒng)最大的特性是可以根據(jù)起得機(jī)的具體情況動(dòng)態(tài)地增刪節(jié)點(diǎn)(CAN監(jiān)控模塊)。高性能的DSP和外圍器件PSD保證了系統(tǒng)的柔性、強(qiáng)壯性和可擴(kuò)展性。
一體化起重機(jī)安全監(jiān)控系統(tǒng)是未來起重機(jī)安全監(jiān)控系統(tǒng)的發(fā)展趨勢(shì),它將逐步取代單一功能的安全保護(hù)裝置,如載荷限制器、力矩限制器、起升高度儀、防碰撞裝置、風(fēng)速報(bào)警器等而成為市場(chǎng)主流產(chǎn)品。

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論