據麥姆斯咨詢報道,近期,廈門大學吳德志教授、王凌云教授團隊聯合北京控制工程研究所的研究人員共同提出一種采用超彈性模型和赫茲接觸模型進行對比的主動設計策略,以開發具有高度可定制靈敏度和線性度的柔性壓力傳感器。
基于該傳感器優越的機電性能,展示了其在生理信號識別方面的潛在應用。
該設計策略將為下一代可穿戴設備等應用場景提供更多可定制的工作范圍和線性靈敏度。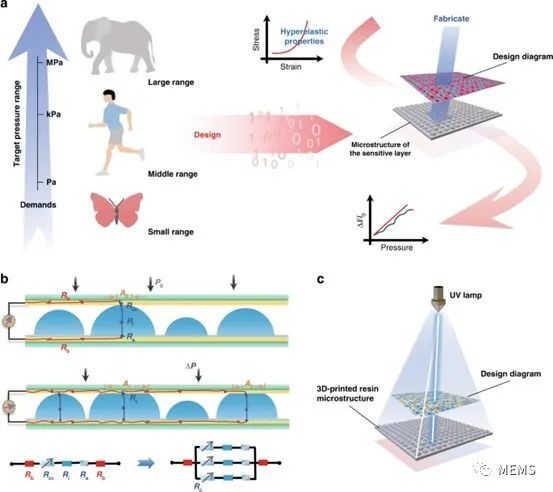
a)本研究開發的靈敏度和線性度可定制的傳感器設計概念;b)基于微結構的傳感器工作機理;c)基于面投影微立體光刻(PμSL)3D打印技術,實現精度為10μm的多級突起主動設計
觸覺壓力傳感器在柔性電子產品中具有重要意義,具有多尺度層次特性的不規則微結構被動設計為實現有壓連續變形提供了最佳解決方案。以往,已有研究人員將轉印的自然界微結構模板(例如花粉粒或花瓣、人體皮膚、砂紙、kirigami圖案)或MEMS制造的人工圖案用于制造壓阻式傳感器的有源層。
不過,這種被動設計策略缺乏基于基本接觸原則或模型的合理優化設計,導致目標性能受限,使得在所需的工作范圍內實現高度可定制的靈敏度和線性度仍然是一個關鍵挑戰。為此,以主動而非被動的方法來定制微結構,有望從根本上解決這個問題,通過適當的理論計算,可以進一步明確微結構的形態和空間參數。
該項工作中,研究人員基于敏感材料超彈性力學特性,提出一種新的微結構主動設計策略。與簡單地在超彈性材料上應用赫茲接觸可能導致彈性接觸偏移不同,研究人員改進的接觸理論模型可以參考相應的有限元分析(FEA)仿真更精確地預測變形參數,從而實現微型傳感器的目標設計和性能實現。
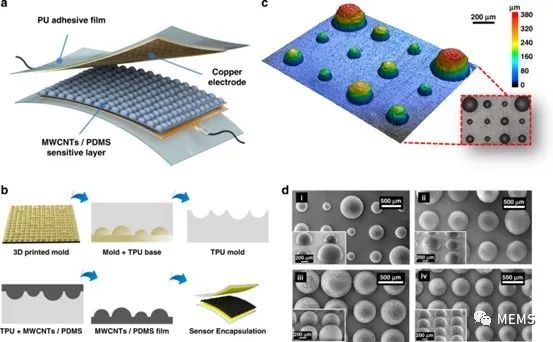
a)帶有MWCNT/PDMS敏感薄膜的傳感器示意圖;b)柔性壓力傳感器的制造工藝:c)多級突起的3D表面掃描圖像;d)具有不同靈敏度的靈敏度定制層SEM圖像
研究人員設計制備了三個傳感器原型,這些傳感器原型在預定的工作范圍(約200 kPa)內表現出高度可定制的靈敏度(0.7、1.0和1.3 kPa?1)和高線性度(R?≈0.99),特別是在預定壓力下具有明顯的抗飽和補償。
此外,傳感器原型還具有12.5/37.5 ms的快速響應/釋放時間、35 Pa的微小檢測限(LOD)以及超過10000次重復加載/卸載循環的良好可重復性。這種直接、主動的設計理念將賦能更多以需求為導向的應用場景(包括可定制的工作范圍和線性靈敏度)。
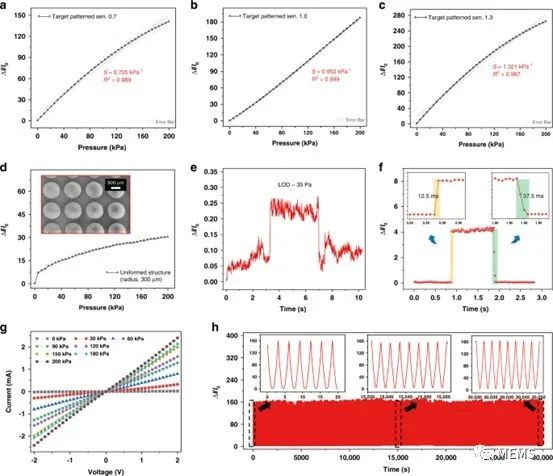
a–c)Δ I/I0與施加壓力(范圍為0~200 kPa)關系表明,基于超彈性機制的預制目標靈敏度分別為0.7、1.0和1.3 kPa?1;d)半徑為300 μm的均勻微結構傳感器的靈敏度性能;e)檢測限度;f)傳感器的響應/釋放時間;g)?2~2 V電壓下的歐姆特性;h)10000次加載/卸載循環下的傳感可重用性
此外,研究人員成功展示了該柔性壓力傳感器在動態活動和手勢識別方面的潛在應用,驗證了通過這種主動的設計策略,可以靈活計算、預設計和制造具有所需靈敏度和線性度的柔性壓力傳感器。未來,基于該設計策略的柔性壓力傳感器有望通過機器學習成為人機交互的首選。
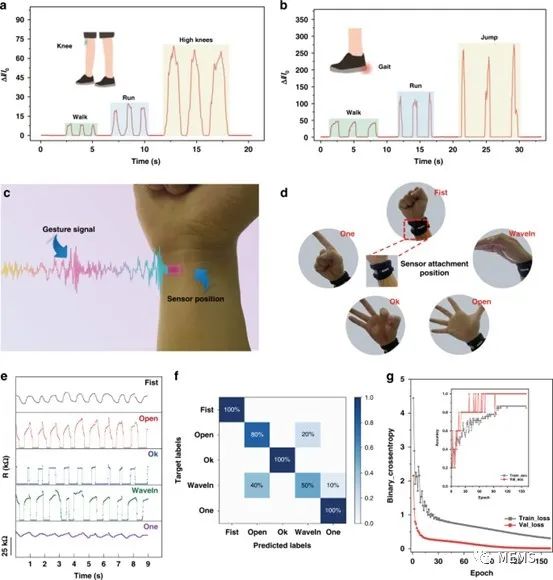
a–b)下肢關節在不同運動時的生理信號變化;c)用于手勢信號識別的傳感器連接位置;d)五種測試手勢;e)基于微結構的傳感器在執行測試手勢時記錄的周期性電阻變化;f)由10倍機器學習得到的權重區分混淆矩陣,預測準確率>86.0%;g)二元交叉熵損失用于評估損失函數有效性,插圖顯示了快速算法收斂下的預測精度
該研究獲得國家自然科學基金項目、國家重點研發計劃項目、中央引導地方科技發展專項資金項目以及精密轉動和傳動機構長壽命技術北京市重點實驗室的支持。
審核編輯:劉清