激光位移傳感器,是位移傳感器中的一種,適用于長距離檢測,因而逐漸取代了拉線位移傳感器,在工業自動化、交通、鋼鐵 、建筑、碼頭等需要進行自動距離位移測量和位置控制中應用。它可以快速、準確的測量到目標地距離,測量結果可以通過各種接口傳輸到設備上,以便進行檢測、控制等應用,同時激光位移傳感器的控制也可通過計算機或其他與其相連的設備來完成。
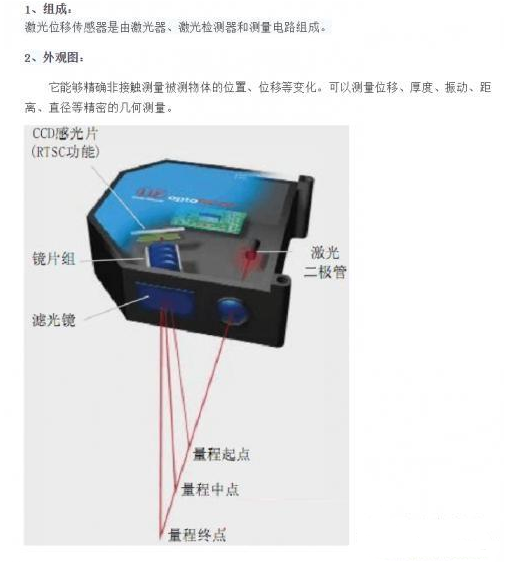
激光位移傳感器可以測量位移、厚度、振動、距離、直徑等精密的幾何測量。激光有直線度好的優良特性,同樣激光位移傳感器相對于我們已知的超聲波傳感器有更高的精度。但是,激光的產生裝置相對比較復雜且體積較大,因此會對激光位移傳感器的應用范圍要求較苛刻。
激光位移傳感器原理
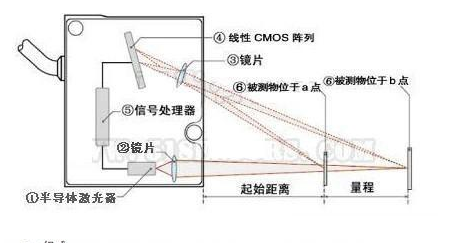
先給大家分享一個激光位移傳感器原理圖,一般激光位移傳感器采用的基本原理是光學三角法:
半導體激光器①被鏡片②聚焦到被測物體⑥。反射光被鏡片③收集,投射到CMOS陣列④上;信號處理器⑤通過三角函數計算陣列④上的光點位置得到距物體的距離。
按照測量原理, 激光位移傳感器分為激光三角測量法和激光回波分析法, 激光三角測量法一般適用于高精度、短距離的測量,而激光回波分析法則用于遠距離測量,下面分別介紹激光三角測量原理和激光回波分析原理。
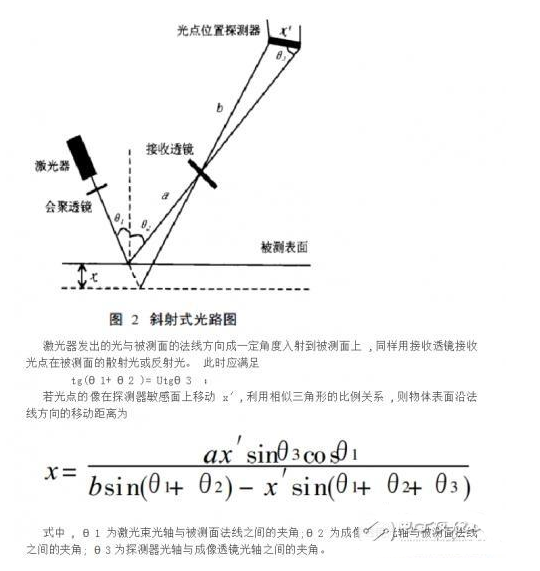
1.激光位移傳感器原理之激光三角測量法原理
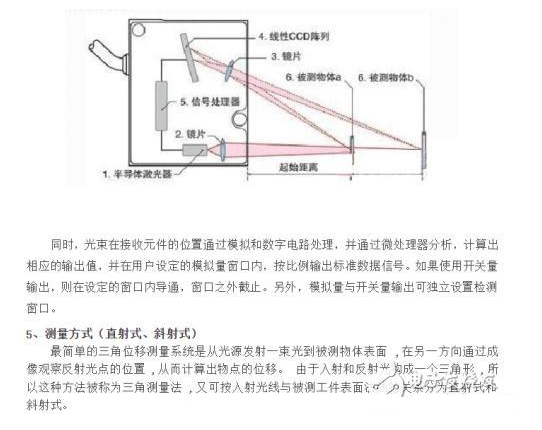
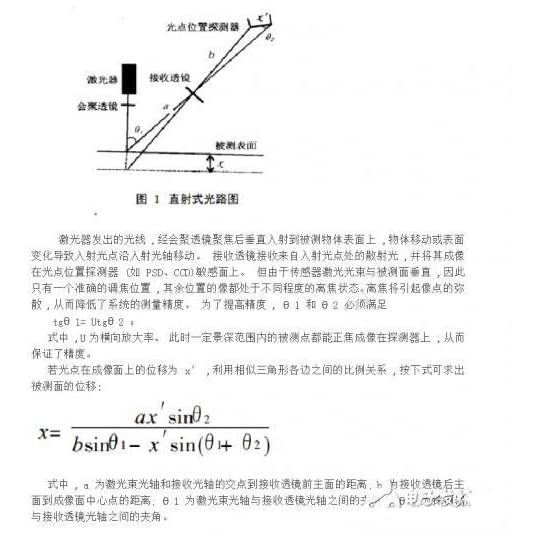
激光發射器通過鏡頭將可見紅色激光射向被測物體表面,經物體反射的激光通過接收器鏡頭,被內部的CCD線性相機接收,根據不同的距離,CCD線性相機可以在不同的角度下“看見”這個光點。根據這個角度及已知的激光和相機之間的距離,數字信號處理器就能計算出傳感器和被測物體之間的距離。
同時,光束在接收元件的位置通過模擬和數字電路處理,并通過微處理器分析,計算出相應的輸出值,并在用戶設定的模擬量窗口內,按比例輸出標準數據信號。如果使用開關量輸出,則在設定的窗口內導通,窗口之外截止。另外,模擬量與開關量輸出可獨立設置檢測窗口。
采取三角測量法的激光位移傳感器最高線性度可達1um,分辨率更是可達到0.1um的水平。比如ZLDS100類型的傳感器,它可以達到0.01%高分辨率,0.1%高線性度,9.4KHz高響應,適應惡劣環境。
2.激光位移傳感器原理之激光回波分析原理
激光位移傳感器采用回波分析原理來測量距離以達到一定程度的精度。傳感器內部是由處理器單元、回波處理單元、激光發射器、激光接收器等部分組成。激光位移傳感器通過激光發射器每秒發射一百萬個激光脈沖到檢測物并返回至接收器,處理器計算激光脈沖遇到檢測物并返回至接收器所需的時間,以此計算出距離值,該輸出值是將上千次的測量結果進行的平均輸出。即所謂的脈沖時間法測量的。激光回波分析法適合于長距離檢測,但測量精度相對于激光三角測量法要低,最遠檢測距離可達250m。
激光位移傳感器因為是發射激光來進行檢測的,所以在使用過程中有很多事項需要注意,如
1、對準太陽或其它強光物體測量會產生錯誤結果;
2、在強反射環境中測量較差反射表面的物體也會產生錯誤結果;
3、量強反射表面會產生錯誤結果;
4、透過透明物測量,如玻璃、光學濾光器、樹脂玻璃,會產生不正確數據;
5、迅速改變測量環境也會產生假數據。
激光位移傳感器現在還沒被廣泛應用,一個最大的原因在與價格比較貴,一般都有幾千的價格甚至上萬的價格,所以現在一些比較小的工廠還不愿意花費那么昂貴的價格來選擇激光位移傳感器,但是可以相信隨著傳感器技術和激光技術的發展,激光位移傳感器的價格會慢慢下降下來,下降到讓客戶能夠接受的價格。