 電子發(fā)燒友App
電子發(fā)燒友App


基于視覺(jué)系統(tǒng)的車道線檢測(cè)有諸多缺陷。
首先,視覺(jué)系統(tǒng)對(duì)背景光線很敏感,諸如陽(yáng)光強(qiáng)烈的林蔭道,車道線被光線分割成碎片,致使無(wú)法提取出車道線。
其次,視覺(jué)系統(tǒng)需要車道線的標(biāo)識(shí)完整,有些年久失修的道路,車道線標(biāo)記不明顯,不完整,有些剛開通幾年的道路也是如此。
第三,視覺(jué)系統(tǒng)需要車道線的格式統(tǒng)一,這對(duì)按照模型庫(kù)識(shí)別車道線的系統(tǒng)尤其重要,有些車道線格式很奇特,比如藍(lán)顏色的車道線,很窄的車道線,模型庫(kù)必須走遍全國(guó)將這些奇特的車道線一一收錄,才能保證順利檢測(cè)。
再次,視覺(jué)系統(tǒng)無(wú)法對(duì)應(yīng)低照度環(huán)境,尤其是沒(méi)有路燈的黑夜。一般LKW要求時(shí)速在72公里以上才啟動(dòng),原因之一是速度比較高時(shí)人不會(huì)輕易換道,另一個(gè)原因就是比較低的車速意味著視覺(jué)系統(tǒng)的取樣點(diǎn)不足,擬合的車道線準(zhǔn)確度較低。而激光雷達(dá)的有效距離一般是視覺(jué)系統(tǒng)的4-5倍,有效的采樣點(diǎn)比較多,車速較低時(shí)檢測(cè)準(zhǔn)確度遠(yuǎn)高于視覺(jué)系統(tǒng)。
最后,如果車道線表面被水覆蓋,視覺(jué)系統(tǒng)會(huì)完全無(wú)效。視覺(jué)系統(tǒng)最大的優(yōu)點(diǎn)就是成本低。因此自2008年后,學(xué)術(shù)界已經(jīng)很少研究基于視覺(jué)系統(tǒng)的車道線檢測(cè),轉(zhuǎn)而利用激光雷達(dá)檢測(cè)車道線,激光雷達(dá)可以解決上述所有問(wèn)題,包括車道線被水覆蓋,激光雷達(dá)最大可穿越70米的水深。
激光雷達(dá)唯一的缺點(diǎn)就是成本太高。
基于雷達(dá)掃描點(diǎn)密度的車道線檢測(cè)
早期激光雷達(dá)檢測(cè)車道線是基于雷達(dá)掃描點(diǎn)密度的車道線檢測(cè)方法,該方法通過(guò)獲取雷達(dá)掃描點(diǎn)的坐標(biāo)并轉(zhuǎn)換成柵格圖,用原始數(shù)據(jù)映射柵格圖,可以是直接坐標(biāo)柵格圖也可以是極坐標(biāo)柵格圖。
按照后期處理需要進(jìn)行選擇,極坐標(biāo)柵格圖被直接用于車道線識(shí)別,即有多個(gè)點(diǎn)映射的柵格就被認(rèn)為是車道線點(diǎn),該識(shí)別方法對(duì)特征提取的要求很高,且受距離影響嚴(yán)重,因?yàn)闃O坐標(biāo)柵格距離越近柵格精度越高,車道線識(shí)別的精度越高,距離越遠(yuǎn)柵格精度越低導(dǎo)致識(shí)別車道線的精度就越低然后利用柵格圖中點(diǎn)的密度提取車道線。
對(duì)于點(diǎn)密度的求取可以采用直方圖統(tǒng)計(jì)的方式,通過(guò)直方圖統(tǒng)計(jì)點(diǎn)密度快捷直觀,容易理解。由于基于掃描點(diǎn)密度的檢測(cè)方法沒(méi)有很復(fù)雜的中間過(guò)程,所以實(shí)時(shí)性高,在快速檢測(cè)中受到大家的青睞。
但是該方法只獲取了掃描點(diǎn)的位置信息,對(duì)于雷達(dá)反饋的其他信息都沒(méi)有進(jìn)一步分析,容易把一些與車道線掃描點(diǎn)密度類似的道路信息混進(jìn)車道線檢測(cè)結(jié)果中;或者在車道線與其他障礙物靠近或重合時(shí),無(wú)法區(qū)分出障礙物和車道線,他們只能被當(dāng)作一個(gè)整體保留或剔除。
所以此方法的抗干擾能力差,容易出現(xiàn)誤檢。這種方法目前已經(jīng)不常使用。
激光雷達(dá)檢測(cè)車道線的四種方法
目前激光雷達(dá)檢測(cè)車道線主要有四種方法:
基于激光雷達(dá)回波寬度;
基于激光雷達(dá)反射強(qiáng)度信息形成的灰度圖,或者根據(jù)強(qiáng)度信息與高程信息配合,過(guò)濾出無(wú)效信息;
激光雷達(dá)SLAM與高精度地圖配合,不僅檢測(cè)車道線還進(jìn)行自車定位;
利用激光雷達(dá)能夠獲取路沿高度信息或物理反射信息不同的特性,先檢測(cè)出路沿,因?yàn)榈缆穼挾仁且阎鶕?jù)距離再推算出車道線位置。對(duì)于某些路沿與路面高度相差低于3厘米的道路,這種方法無(wú)法使用。
后三種方法需要多線激光雷達(dá),最少也是16線激光雷達(dá)。前者可以使用4線或單線激光雷達(dá),考慮到奧迪A8已經(jīng)開始使用4線激光雷達(dá),4線激光雷達(dá)已經(jīng)進(jìn)入實(shí)用階段。
當(dāng)然,這四種方法也可以混合使用。
車道線檢測(cè)兩步走
車道線檢測(cè)基本分兩部走:提取幾何或物理特征,利用離散數(shù)據(jù)擬合成車道線。無(wú)論是視覺(jué)還是激光雷達(dá),通常都是用最小二乘法擬合車道線。
離散數(shù)據(jù)擬合車道線
Ibeo是最適合第一種方法的激光雷達(dá)。Ibeo的激光雷達(dá)特有三次回波技術(shù)。每點(diǎn)激光返回三個(gè)回波,返回信息能夠更加可靠地還原被測(cè)物體,同時(shí)能夠精確分析相關(guān)物體數(shù)據(jù),并能識(shí)別雨、霧、雪等不相關(guān)物體的數(shù)據(jù)。
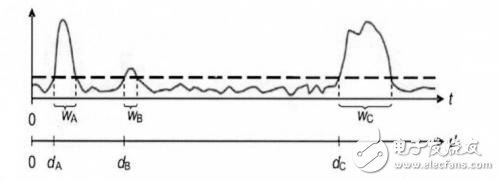
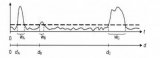
如圖所示,其中W表示回波脈沖寬度,d表示掃描目標(biāo)的距離。反射率作為物體的固有屬性,受物體材質(zhì)、顏色等的影響,能夠很好地反映物體特征,不同顏色。
密度的物體的反射率都有一定的差異,物體反射率決定Ibeo回波脈沖寬度特性,路面和車道線有著明顯的差異,所以可以利用回波脈沖寬度的差異對(duì)目標(biāo)進(jìn)行區(qū)分。
上圖為典型的車道線標(biāo)識(shí)
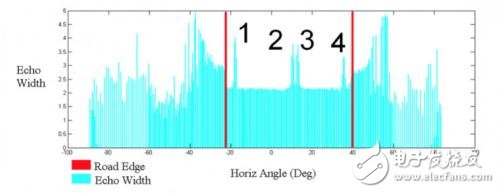
回波寬度
很明顯,路面的回波寬度在2米左右,車道線的回波寬度在4米左右。
根據(jù)Ibeo的特性知道其垂直方向上的掃描角度為3.2度,共分四層掃描,即每層0.8度,在Ibeo水平安裝的情況下,并考慮到實(shí)際情況一一Ibeo的高度受車體的限制,其下面兩層(一、二層)主要返回道路表面的信息,而上面兩層(三、四層)主要返回有一定高度的道路信息。
根據(jù)激光雷達(dá)的特性知道激光束掃描到物體會(huì)立即產(chǎn)生回波,一二兩層的掃描距離遠(yuǎn)小于三四兩層。
通過(guò)理論分析和實(shí)驗(yàn)驗(yàn)證可知一二兩層返回的信息主要包括路面、車道線、少量障礙物和邊界數(shù)據(jù);三四兩層主要返回道路邊界、障礙物和少量路表信息,所以在特征種子點(diǎn)提取階段需要重點(diǎn)分析一二兩層的雷達(dá)數(shù)據(jù),這部分?jǐn)?shù)據(jù)中對(duì)于車道線檢測(cè)最大的干擾在于路面,提取車道線種子點(diǎn)特征的重點(diǎn)就是分離車道線特征與路面特征。
最小二乘法擬合車道線
通過(guò)最小類內(nèi)方差算法找到路面與車道線的分割閾值,利用誤差分析原理剔除車道線集合范圍內(nèi)的粗大誤差,即剔除干擾信息,提取出車道線特征種子點(diǎn)。然后再擬合成車道線。
最小類內(nèi)方差是一種自適應(yīng)閾值的求取方法,也是一種模糊聚類方法。其基本思想是使用一個(gè)閾值將整體數(shù)據(jù)分成兩個(gè)類,因?yàn)榉讲钍菙?shù)值分布是否均勻的度量,兩個(gè)類的內(nèi)部的方差和越小則每一類內(nèi)部的差別就越小,那么兩個(gè)類之間的差別就越大。
如果存在一個(gè)閾值使得類內(nèi)方差和最小則說(shuō)明這個(gè)閾值就是劃分兩類的最佳閡值,使用最佳閾值劃分意味著劃分兩類出現(xiàn)偏差的概率最小。
通過(guò)回波脈沖寬度利用最小類內(nèi)方差算法建模分割車道線特征與路面特征,剔除車道線特征提取的最大干擾。對(duì)回波脈沖寬度進(jìn)行統(tǒng)計(jì)分析,并劃分脈沖寬度級(jí)別,因?yàn)橹苯邮褂妹}沖寬度值其分布不利于統(tǒng)計(jì),采用對(duì)脈沖寬度平均區(qū)域劃分即脈沖寬度級(jí),統(tǒng)計(jì)各級(jí)內(nèi)的點(diǎn)數(shù),從而得到回波脈沖寬度分布直方圖。再利用諸如模糊聚類分析方法剔除干擾值。
最小二乘法近似求解不斷優(yōu)化靠近真實(shí)值的數(shù)學(xué)方法,它可以利用己知數(shù)據(jù)簡(jiǎn)便地求得未知數(shù)據(jù),并不斷優(yōu)化保證求得的數(shù)據(jù)與真實(shí)數(shù)據(jù)問(wèn)的誤差的平方和最小。
利用最小二乘法擬合曲線,就是不斷優(yōu)化求取某條曲線使其最能體現(xiàn)已有數(shù)據(jù)點(diǎn)的變化趨勢(shì),具體過(guò)程是利用已知的數(shù)據(jù)點(diǎn)優(yōu)化求取最優(yōu)的未知數(shù)據(jù)合成一條最佳的曲線,并保證已有數(shù)據(jù)點(diǎn)到曲線的距離的平方和最小。
也就是說(shuō),曲線擬合不要求近似曲線過(guò)所有數(shù)據(jù)點(diǎn),只需要己知的數(shù)據(jù)點(diǎn)都距離在這條曲線的不遠(yuǎn)處,即這條曲線能反映數(shù)據(jù)點(diǎn)的整體分布,又不至于出現(xiàn)較大的局部波動(dòng),已知數(shù)據(jù)與曲線的偏差的平方和達(dá)到最小就能有效控制波動(dòng)。
簡(jiǎn)而言之,最小二乘法擬合就是利用最小化誤差的平方和求取數(shù)據(jù)的最佳函數(shù)匹配。
基于激光雷達(dá)反射強(qiáng)度信息
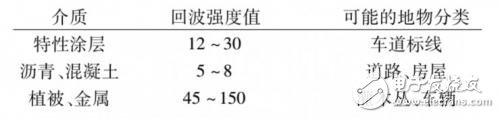
根據(jù)反射強(qiáng)度值做的車道線檢測(cè),在車載激光雷達(dá)獲取的道路周圍環(huán)境點(diǎn)云數(shù)中,可以輕松區(qū)分出道路與車道線。
具體到車載激光雷達(dá)獲取的道路周圍環(huán)境三維點(diǎn)云數(shù)據(jù)中,可以看作一個(gè)局部均值變點(diǎn)模型,每一激光層采集的可行駛區(qū)域內(nèi)回波強(qiáng)度值就是一組輸出序列,其回波強(qiáng)度值變化的點(diǎn)就是所要求的車道標(biāo)線點(diǎn)集。
現(xiàn)在只須在每一激光層采集的可行駛區(qū)域內(nèi)回波強(qiáng)度值輸出序列中檢測(cè)是否有變化點(diǎn),若存在則標(biāo)記并提取這些變點(diǎn)。基于車載雷達(dá)獲取的智能車感興趣區(qū)域內(nèi)海量點(diǎn)云數(shù)據(jù)中的T坐標(biāo)值有一定高程特點(diǎn)進(jìn)行濾波,確定可行駛區(qū)域進(jìn)而剔除與車道標(biāo)線回波強(qiáng)度值相近的障礙物。

上圖為簡(jiǎn)單濾波后粗提取的車道線回波強(qiáng)度值投影圖(全局圖)
由于車載激光雷達(dá)獲取的道路周圍環(huán)境點(diǎn)云數(shù)據(jù)是分層存儲(chǔ)的,不同激光層獲取的道路周圍環(huán)境點(diǎn)云數(shù)據(jù)相鄰兩點(diǎn)間距與到雷達(dá)坐標(biāo)系原點(diǎn)的距離有關(guān)。
距離越遠(yuǎn)間距越大,考慮到安裝在正常行駛上的激光雷達(dá)獲取的車道標(biāo)線曲率變較小,所以利用文獻(xiàn)提出的基于車道標(biāo)線方向的EM最大期望聚類算法對(duì)粗提取車道標(biāo)線點(diǎn)云數(shù)據(jù)進(jìn)行聚類。
通過(guò)在聚類過(guò)程中估計(jì)車道標(biāo)線方向來(lái)對(duì)粗提取的車道標(biāo)線點(diǎn)云數(shù)據(jù)集進(jìn)行分類去噪。然后再利用最小二乘法進(jìn)行車道線擬合。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論