 電子發燒友App
電子發燒友App


引言
在以速度決定優劣的飛恩卡爾智能車比賽中,任何因素都可能影響小車的運行。為了滿足對小車在賽道中各種狀態精確分析的需求,上位機的效據采集與處理要求通信波特率高、信號傳輸穩定、不丟包、數據處理量大、數據處理及時等。在基于Matlab環境下的串口通信中,查詢方式下的非實時串行通信技術對實時性要求很高的智能車通信有很大的局限性。而在目前普遍采用的中斷機制下的通信雖然可以滿足實時性的需要,卻需要修改Matlab自帶的instrcallback回調函數。程序調試過程中慘改了回調函數后,需要重新啟動Matlab才能使得新的回調函數文件生效。由此可以看出,其操作復雜易出錯,且instrcallback函數接收到保存在工作空間的數據不能被GUI組件的函數實時調用。故此方式在需要對多組數據進行分別作圖分析時,往往生成多個零散圖形窗口。為了滿足智能車的實時通信需求,同時使基于Matlab GUI的通信界面更加簡潔,本文提出了一種將事件中斷函數寫入GUI組件函數中的方式。
Matlab是由美國Mathworks公司開發的面向理論分析研究及工程設計處理和繪圖的一套具有強大功能的軟件系統。Matlab運行穩定、可靠,使用方便,是廣大科研人員進行科學研究的得力助手。從Matlab6.0版本開始,Mathworks公司在軟件中增加了設備控制箱(instrument control toolbox),提供了對RS-232/RS-485通信標準的串口通信的正式支持。Matlab GUI(Graphic User Interface)是內置于Matlab的進行圖形界面開發的模塊。本文主要介紹在Mariab GUI環境下,上位機與智能車進行實時通信盼辦法。該方法較之使用VC/VB高級語言編程,
大大縮減了開發時間,提高了開發效率。另外,較之傳統的RS-232接口,使用藍牙接口能夠更大范圍地全方位進行數據傳輸和采集。實驗結果表明,經過兩次握手處理后數據傳輸實時穩定,具有很強的實用性。
1 系統總體設計方案
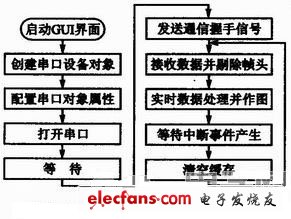
系統采用飛恩卡爾MCA8HCS12G128單片機作為智能車的控制器,PC機為上位機。利用Matlab GUI構建起二者的實時通信、數據處理和繪圖等平臺。整個系統的原理框圖如圖1所示,介紹了基于Matlab的GUI和串口通信機制下建立上位機與智能車實時通信和作圖的平臺方法。
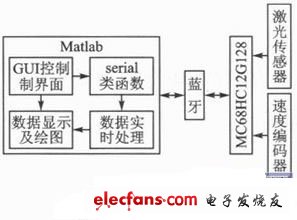
智能車與PC機通過藍牙相連,系統工作時,由Matlab調用設備控制工具箱中的serial類函數來設置串口屬性,創建串口對象,從而實現Matlab對串口的控制和讀寫操作。在對智能車的調試過程中,可以通過Matlab向藍牙發送特殊指令,啟動智能車。在智能車系統運行后便可以將所采集位置和速度等效據通過藍牙回送給PC機。
由Matlab通過中斷方式實時接收數據,并對數據進行分析和處理,實時繪出相應的圖形。
2 Matlab GUI設計介紹
①運行Matlab后,點擊主界面左上角的GUI圖標即可運行Matlab GUI開發工具。
②點擊Blank GUI(Default)選項并點擊OK按鈕,完成新建Blank GUI.
③在新建的Blank GUI界面的右方菜單中添加設計所需要的元素,完成串口通信及數據實時顯示等功能的GUI界面設計。
④編寫GUI組建相應的響應控制代碼,運行后的通信仿真界面如圖2所示。
3 單片機與PC機串行通信
3.1 設計思想
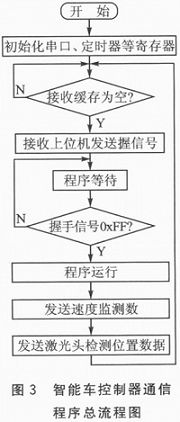
MCA8HCS12G128單片機的軟件設計需要實現對程序的初始化、接收與發送串口信號、速度和位置數據的采集等功能。為了保證上位機采集數據的可靠性和穩定性,防止出現丟包事件,在通信過程中約定了雙方的握手方法。在程序初始化以后,等待fwrite命令發送的握手信號0xFF.當單片機第一次接收到的信號為0xFF時,則握手成功,并開始運行電機和激光頭等子程序。在實驗過程中發現存在發送的第一組數據第一個字節丟失的現象,為了增強數據的可靠性,首先判斷數據包的前兩個字節是否為0xFF,是則剔除相應字節,分離出有效的數據,再在回送的速度、激光傳感器的數據中嵌入兩個字節的握手信號0xFF,Matlab接收到串口的數據后進行相應的處理。智能車控制器通信的總程序流程如圖3所示。
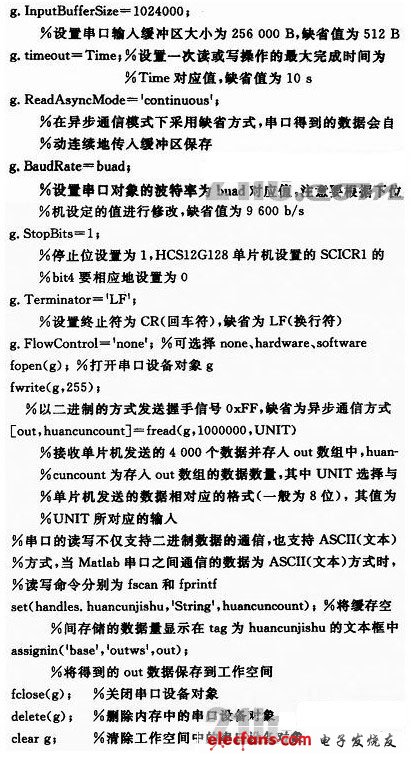
3.2 系統藍牙串口通信主要代碼

4 基于Matlab GUI的PC機與智能車的通信
4.1 Matlab GUI基礎上實現串口通信的軟件設計
在Matlab環境下,讀取串口數據有查詢和中斷兩種方式。查詢方式數據只能分批進行傳送,實時性不高,且對系統資源的占用比較大。以中斷方式實現的串口通信,通常的處理方式是對Matlab提供的instrcallback回調函數進行修改,采用事件驅動的方式,達到實時處理下位機傳送數據的目的。但是采用Matlab的事件和回調函數機制編程要相對復雜一些,在對instreallback函數進行修改和備份等操作時容易出錯且比較麻煩。另外,每次修改instreallbaek函數后都要重新啟動Matlab,可能會導致數據丟失等一些不必要的麻煩。將事件驅動函數寫入GUI組件的M文件中,可以減少綰程的復雜性,避免一些不必要的麻煩,實現串口之間的實時通信。
4.2 設備控制工具箱介紹
Matlab設備控制工具箱主要是提供Matlab軟件與各種智能儀器的直接通信功能。工具箱提供了以下功能:
①支持串行接口(RS-232/RS-422/RS-485)、GPIB接口(IEEE 488)等通信協議。
②支持IVI、VXI plug&play和Matlab設備驅動(instrument drivers),不需要學會寫與設備相關的指令即能與儀器直接聯通。
③傳輸的數據可以是文本或二進制的(數字的)。
④支持同步和異步(有阻塞或無阻塞)通信。
⑤支持基于事件的通信。
⑥新的TMTOOL圖形用戶接口不僅能夠連接儀器、接收/發送數據,而且可以自動生成M代碼文件,以加入編寫的Matlab程序中。
5 基于Matlab GUI查詢方式實現異步串行通信
基于Matlab查詢方式的非實時串口通信雖然編程簡單,對數據的調用處理也更為容易,但是只能接收一個過程的數據,這在對實時性要求較高的系統中往往不能滿足設計者的需求。以下為部分通信程序代碼。
6 基于Matlab中斷方式實現實時串行通信
事件驅動方式的優點是程序響應及時,可靠性高。在Matlab環境下實現實時通信的中斷方式,實際上就是采用事件驅動的方式實現的,類似于VB語言MSComm控件中OnComm事件的實現方法。當串口上監視到緩沖區有指定字節數目的數據可用(bytes-available event),串口接收到的數據長時間處于非激活狀態(break-interrupt event),串行口引腳狀態改變(pin-status event)或輸出緩沖區為空(output empty eve nt)等事件發生時,Matlab會自動調用回調函數進行通信事件的處理。因此,事件驅動實質上是一種中斷機制,而回調函數實質上相當于一個中斷服務子程序。Matlab端實時串行通信的程序流程如圖4所示。以下為兩種不同的方式實現實時通信的中斷機制程序。
6.1 將中斷服務子程序寫入GUI組件的部分M文件代碼
主程序創建串口設備對象、設置串口設備屬性及打開串口等初始化操作的代碼與查詢方式下的初始化代碼相同:
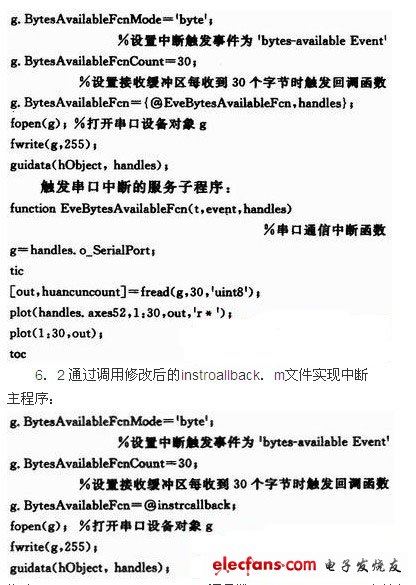
6.2 通過調用修改后的instroallback.m文件實現中斷
主程序:
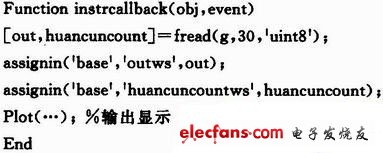
修改instreallback(obj,evenlt)回調函數,instrcallback.m文件包含了Matlab提供的回調函數程序模板,設計者可以根據需要自行添加相應的服務程序代碼。Matlab安裝目錄下有兩個instrcallback.m文件,只需要修改\MATLAB\toolbox\matlab\iofun\@instrument目錄下的instrcallback.m文件即可。另外,在修改instrcallback.m文件之前,最好對其做一個備份。在修改了instrcallback(obj,event)回調函數后,需要對其進行保存,重新啟動Matlab配置該文件,才使修改后的函數生效。
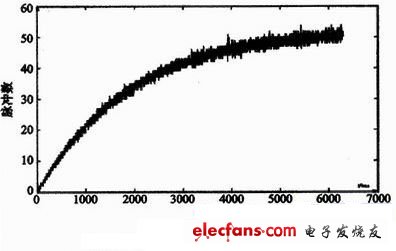
圖5為以下方式實現的智能車啟動過程速度的實時顯示,修改后的instrcallback.m文件主要程序代碼如下:
實驗證明,基于Matlab事件驅動實現的智能車與上位機的實時串口通信可以很好地滿足智能車調試過程中的需要,且將中斷服務子程序寫入GUI組件和修改instrcallback.m文件兩種方式的通信都穩定可靠。
結語
在Matlab環境下兩種實現智能車與PC機實時通信的中斷機制都能實時穩定地進行數據傳輸,不過將中斷服務子程序寫入GUI組件的方式編程簡單,數據處理方便,實現更為容易,開發效率相對得到了較大的提高。實踐證明,采用這種方法是可行的,它不但能夠應用于本文的智能車系統,也可廣泛應用在其他具有串口通信能力的儀器設備中。









 工商網監
工商網監
評論