完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 控制器
控制器(英文名稱:controller)是指按照預(yù)定順序改變主電路或控制電路的接線和改變電路中電阻值來(lái)控制電動(dòng)機(jī)的啟動(dòng)、調(diào)速、制動(dòng)和反向的主令裝置。由程序計(jì)數(shù)器、指令寄存器、指令譯碼器、時(shí)序產(chǎn)生器和操作控制器組成,它是發(fā)布命令的“決策機(jī)構(gòu)”,即完成協(xié)調(diào)和指揮整個(gè)計(jì)算機(jī)系統(tǒng)的操作。
文章:16508個(gè) 瀏覽:179985次 帖子:4266個(gè)

GPU 最初是純粹用于圖形渲染的設(shè)備,但其高度并行的特性也使其對(duì)某些計(jì)算任務(wù)具有吸引力。隨著過(guò)去幾十年 GPU 計(jì)算場(chǎng)景的發(fā)...

PLC控制系統(tǒng)及PLC控制器密碼應(yīng)用技術(shù)規(guī)范
PLC控制系統(tǒng)及PLC控制器密碼應(yīng)用技術(shù)規(guī)范
2023-07-06 標(biāo)簽:控制器控制系統(tǒng)plc 1169 0
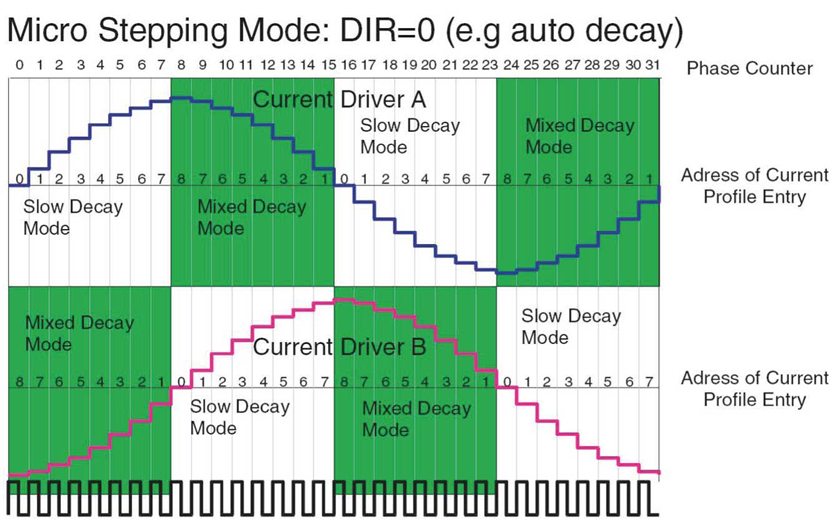
L9942反電動(dòng)勢(shì)堵轉(zhuǎn)檢測(cè)算法
L9942步進(jìn)電機(jī)控制器具有全步、半步和微步模式。微步模式提供32個(gè)可編程電流調(diào)節(jié)步進(jìn),步進(jìn)角度超過(guò)360°。這意味著每個...
主控MCU ( Microcontroller Unit )是指嵌入式系統(tǒng)中的主要控制器,它通常是一個(gè)集成了處理器、存儲(chǔ)器、輸入輸出接口、定時(shí)器、ADC...
2023-07-05 標(biāo)簽:MCU控制器嵌入式系統(tǒng) 1459 0
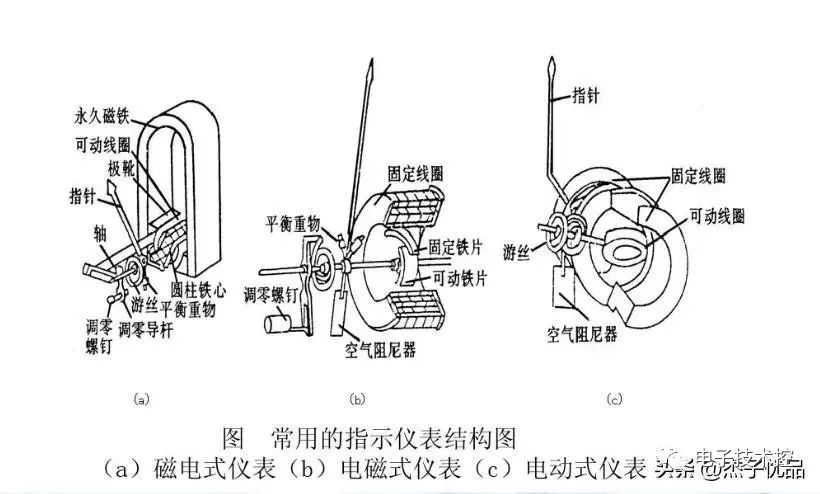
電氣計(jì)量?jī)x表是配電線路中重要組成部分,用于監(jiān)測(cè)供電指標(biāo)、顯示運(yùn)行狀態(tài),為日常電氣系統(tǒng)運(yùn)行、維護(hù)提供重要...
can總線系統(tǒng)由哪些部分組成 驅(qū)動(dòng)can總線有哪些
控制器區(qū)域網(wǎng)絡(luò)(Controller Area Network,簡(jiǎn)稱CAN):CAN總線的核心是控制器區(qū)域網(wǎng)絡(luò),它是一種串行通信...

為解決靜電問(wèn)題,可以使用FMX-004靜電測(cè)試儀或在線靜電監(jiān)測(cè)儀對(duì)產(chǎn)線的不同位置的進(jìn)行靜電測(cè)量,以準(zhǔn)確了解產(...
2023-07-04 標(biāo)簽:控制器plc監(jiān)測(cè)儀 882 0
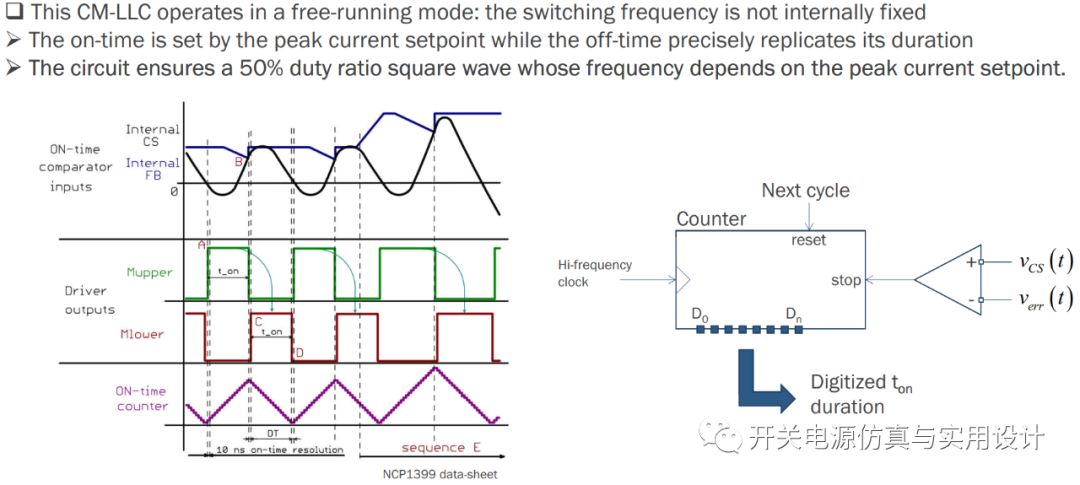
當(dāng)今頻率調(diào)制模式的諧振模式控制器絕大部分都是僅使用輸出電壓或輸出電流進(jìn)行反饋控制
不論是在工作中,還是日常生活中,每天必做的一件事兒就是給各種數(shù)碼設(shè)備充電
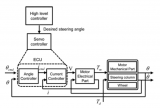
自動(dòng)駕駛汽車規(guī)避轉(zhuǎn)向的模型預(yù)測(cè)控制
層輸出的參考軌跡,結(jié)合車輛自身狀態(tài),控制車輛跟蹤參考軌跡形式,實(shí)現(xiàn)車輛的縱、側(cè)向控制。車輛的縱向控制主要實(shí)現(xiàn)速度的跟蹤,側(cè...
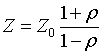
當(dāng)信號(hào)進(jìn)入射頻后,阻抗匹配變得十分重要,差的匹配造成的反射將嚴(yán)重影響信號(hào)質(zhì)量,甚至可能造成誤操作,因此必須以傳輸線理論進(jìn)行分析,...
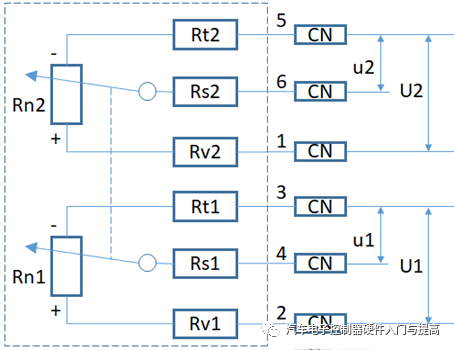
位置傳感器是利用通過(guò)機(jī)械結(jié)構(gòu)的位置移動(dòng)來(lái)帶動(dòng)滑動(dòng)變阻器移動(dòng)的傳感器,根本原理就是滑動(dòng)變阻器
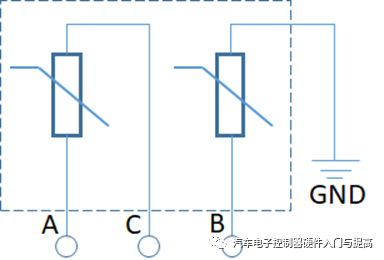
溫度傳感器是利于熱敏電阻的負(fù)特性,即電阻與溫度成非線性反比例關(guān)系實(shí)現(xiàn)對(duì)溫度的測(cè)量。

S7-1500與S7-200 SMART的PROFINET IO通信配置
從 S7-200 SMART V2.5 版本開(kāi)始,S7-200 SMART 開(kāi)始支持做 PROFINET IO 通信的智能設(shè)備。作為智能設(shè)備,S7-20...
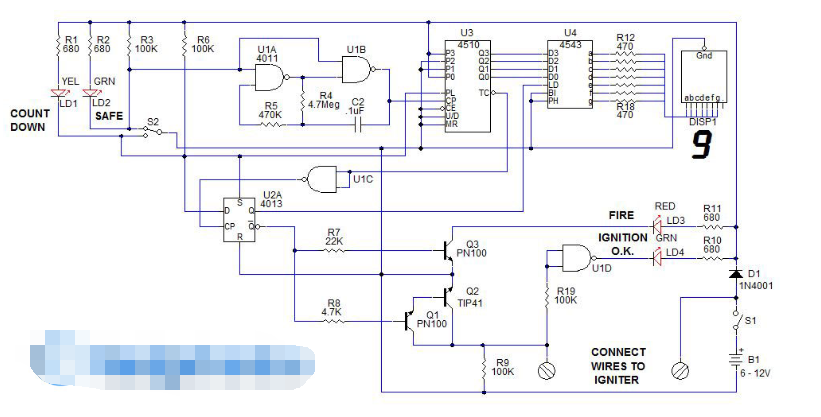
模型火箭是很好玩的東西,但如果不小心處理可能會(huì)很危險(xiǎn)。該火箭倒計(jì)時(shí)發(fā)射控制器在發(fā)射模型火箭時(shí)非常有用,并且還為用戶提供了安全性。該發(...

不穩(wěn)定的零極點(diǎn)為何不能對(duì)消?
被控對(duì)象不穩(wěn)定極點(diǎn)是指具有正實(shí)部的極點(diǎn),它們所對(duì)應(yīng)的模態(tài)隨著時(shí)間的推移而發(fā)散,導(dǎo)致系統...
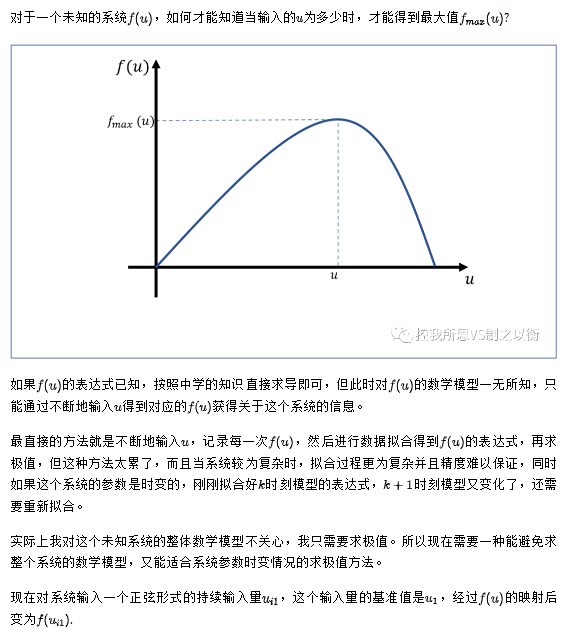
極值搜索控制是一種基于最優(yōu)極值搜索的自適應(yīng)控制算法。它的核心思想是通過(guò)優(yōu)化性能指標(biāo)來(lái)調(diào)整控制器的參數(shù),以逐步實(s...
2023-06-30 標(biāo)簽:控制器正弦波simulink仿真 3815 1
控制方式主要可分為反饋控制和前饋控制兩類。通常,我們的注意力集中在反饋控制上,因?yàn)榉答伩刂瓶梢苑€(wěn)定系統(tǒng)并同時(shí)滿足一些魯棒性要求以及飽和限制。
2023-06-30 標(biāo)簽:控制器非線性系統(tǒng)PI控制 2.4萬(wàn) 0
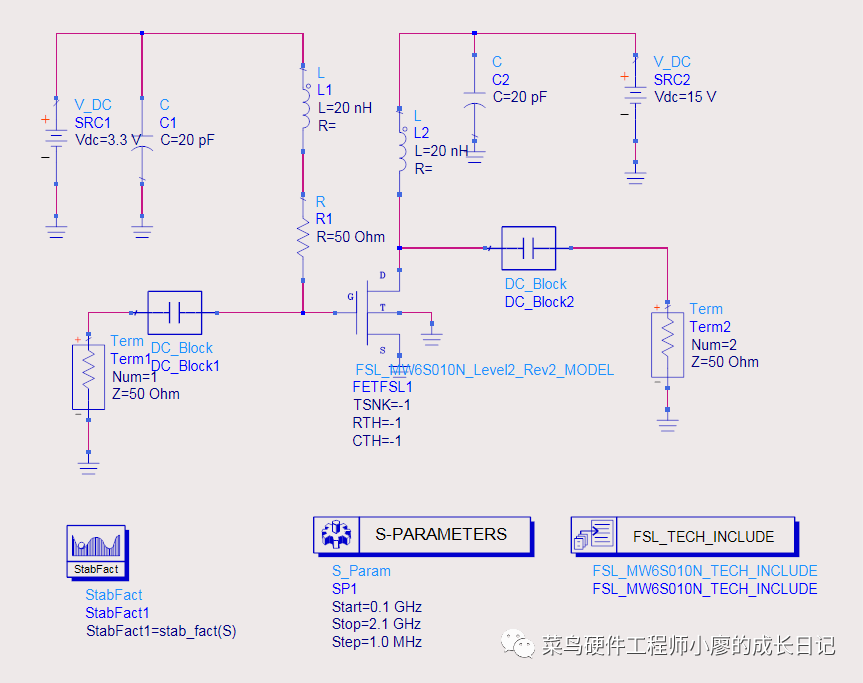
功率放大器的輸入、輸出阻抗匹配的實(shí)現(xiàn)步驟
阻抗匹配電路決定了功率放大器輸出至負(fù)載的最大功率,是功率放大器電路設(shè)計(jì)中重要的一個(gè)環(huán)節(jié)。

什么是I3C總線?它和I2C和SMBus是什么關(guān)系?
計(jì)算機(jī)技術(shù)發(fā)展十分迅速,三十年前,一間房子大小的小型機(jī)的算力,到現(xiàn)在還比不上大家手機(jī)CPU的算力。
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語(yǔ)言教程專題 教程专题
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無(wú)刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺(jué) | 無(wú)人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹(shù)莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1



