 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
構(gòu)建機器人
要構(gòu)建機器人,我們只需遵循 TI RSLK 基本套件構(gòu)建說明即可。我們已將它們附在這篇文章的示意圖部分。我們對說明所做的唯一更改是我們沒有切斷 PCB 上的任何連接。TI 提供的說明將幫助您完成除了構(gòu)建面包板和將面包板放在機器人頂部之外的所有操作。
在將面包板放在機器人頂部之前,請按照本文原理圖部分中的面包板原理圖將 LED 連接到它上面。以后很難做到這一點,因為電線連接將位于面包板下方。然后,為了將面包板連接到機器人,我們使用透明膠帶。您可以使用任何您喜歡的東西,包括套件中提供的螺絲,但膠帶很便宜,而且比試圖擰穿面包板容易得多。
編程機器人
要對機器人進行編程,必須將其插入計算機上的 USB 端口,并且必須使用電機板(黑板)上的開關關閉電池。然后,在 Code Composer Studio (CCS) 中打開可下載項目后,單擊“調(diào)試”按鈕。這將編譯代碼并將其加載到機器人上。一旦 CCS 完成加載代碼,它就會停止機器人并等待您按下黃色播放按鈕來調(diào)試機器人。可以,也可以按紅色停止鍵,不用插電就可以使用機器人。
操作機器人
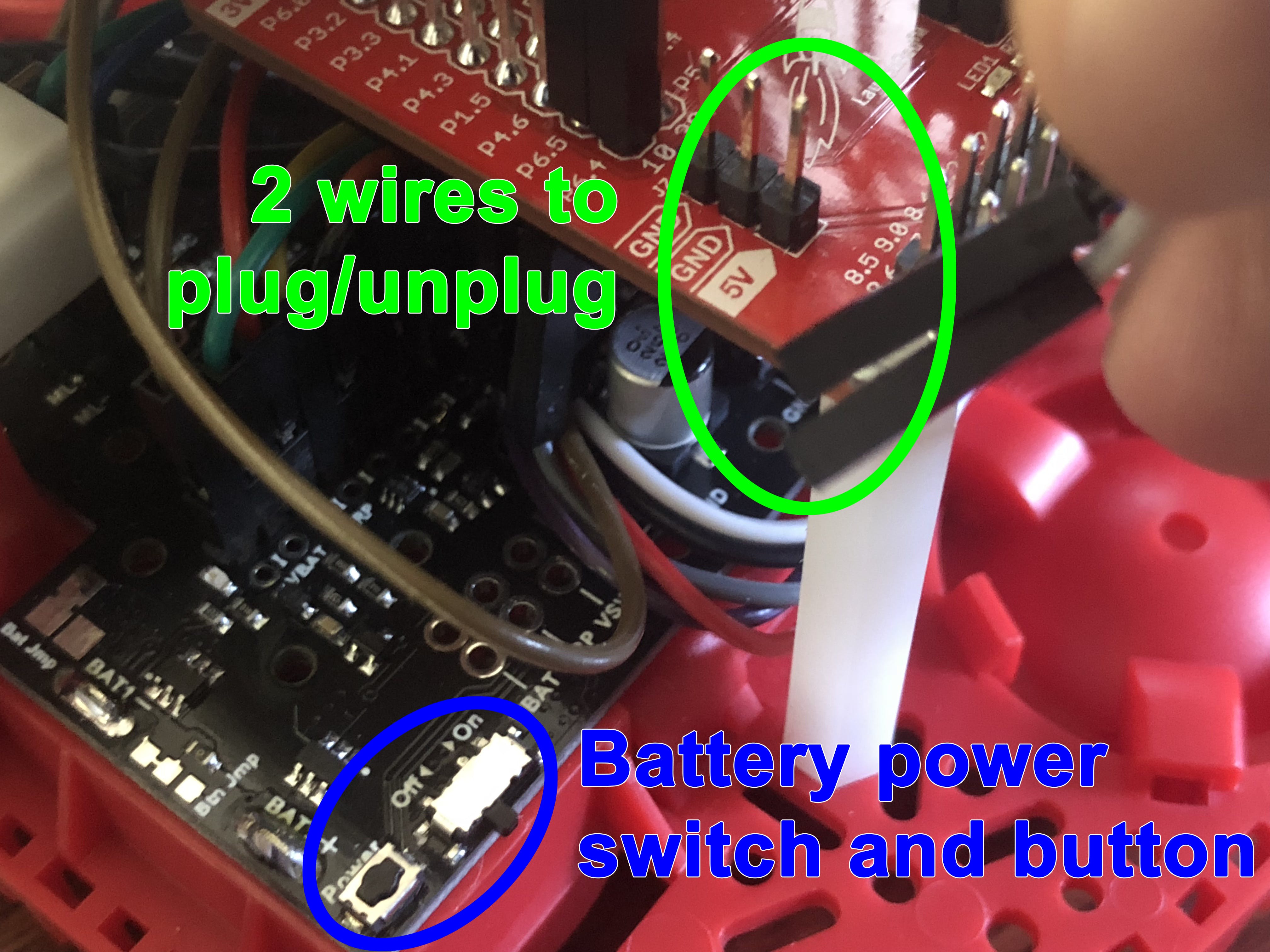
在沒有 USB 電源的情況下打開機器人:斷開 USB 并確保機器人中有電池。如果您之前拔下了上面顯示的 2 根電線,請將它們插入,然后將靠近左輪的電機板(黑板)上的電源開關滑動到打開位置。
左 Launchpad 按鈕:告訴機器人解決一個新的迷宮或停止它正在做的任何事情。充當切換按鈕。
右 Launchpad 按鈕:告訴機器人顯示它找到的最短路徑。如果迷宮沒有完全解決,它將顯示目前為止所知道的盡可能多的迷宮。
使用 USB 調(diào)試機器人:如果您想在使用機器人時查看控制臺輸出,請確保您有足夠長的微型 USB 電纜讓機器人四處漫游;套件中只有一個短的。斷開下面所附 TI 構(gòu)建說明末尾提到的 2 根電源線和地線(如上圖所示)。通過 USB 將機器人插入計算機,然后將電機板上的電源開關滑動到打開位置以打開電機。重要的是不要從 USB 運行電機,因為它們的行為與使用電池供電不同。這就是為什么我們斷開那 2 根電線并打開電池。
關閉機器人:將電機板(黑板)電源開關撥到關閉位置。然后按下開關旁邊的電源按鈕關閉機器人。
整體算法
機器人使用具有 4 種可能狀態(tài)的狀態(tài)機:停止、運行、獲勝和解決。
- 停止狀態(tài):當機器人開啟或用戶在解決迷宮或顯示解決方案的過程中停止機器人時。
- 運行狀態(tài):當它正在解決一個新的迷宮時。
- 獲勝狀態(tài):如果它在迷宮中找到了寶藏。
- 求解狀態(tài):當機器人正在顯示解決迷宮的最短路徑(解決方案)時。
機器人使用 SysTick 計時器通過中斷定期讀取線傳感器。線路傳感器無法自行發(fā)送中斷,因此這是最有效的替代方案。
當機器人第一次進入 main() 函數(shù)時,它會初始化所有需要初始化的東西:它的狀態(tài)、時鐘速度、電機、保險杠、線傳感器、板載按鈕、板載 LED、面包板 LED、定時器 A0、SysTick 定時器, 并中斷。然后它進入一個永遠運行的 while 循環(huán)。
在這個 while 循環(huán)中,機器人將線傳感器的值保存到一個臨時變量中,以防 SysTick 定時器中斷激活中間循環(huán)并更改全局線傳感器變量的值。然后它會根據(jù)所處的狀態(tài)采取不同的行動。
如果機器人處于停止或獲勝狀態(tài),SysTick 計時器將禁用其中斷,然后機器人等待中斷,中斷可能來自保險杠開關、Launchpad 板上的按鈕之一或計時器 A0(稍后討論并用于面包板上的 LED)。將機器人設置為等待中斷將其置于低功耗模式,因此不會浪費電力。
如果機器人處于運行狀態(tài),則機器人解決迷宮問題。該算法的詳細信息在下面的“迷宮解決算法”部分中進行了解釋。
如果機器人處于求解狀態(tài),則機器人會顯示出最短路徑以解決迷宮問題。該算法的詳細信息在下面的“最短路徑算法”部分中進行了解釋。
尋找最短路徑的邏輯
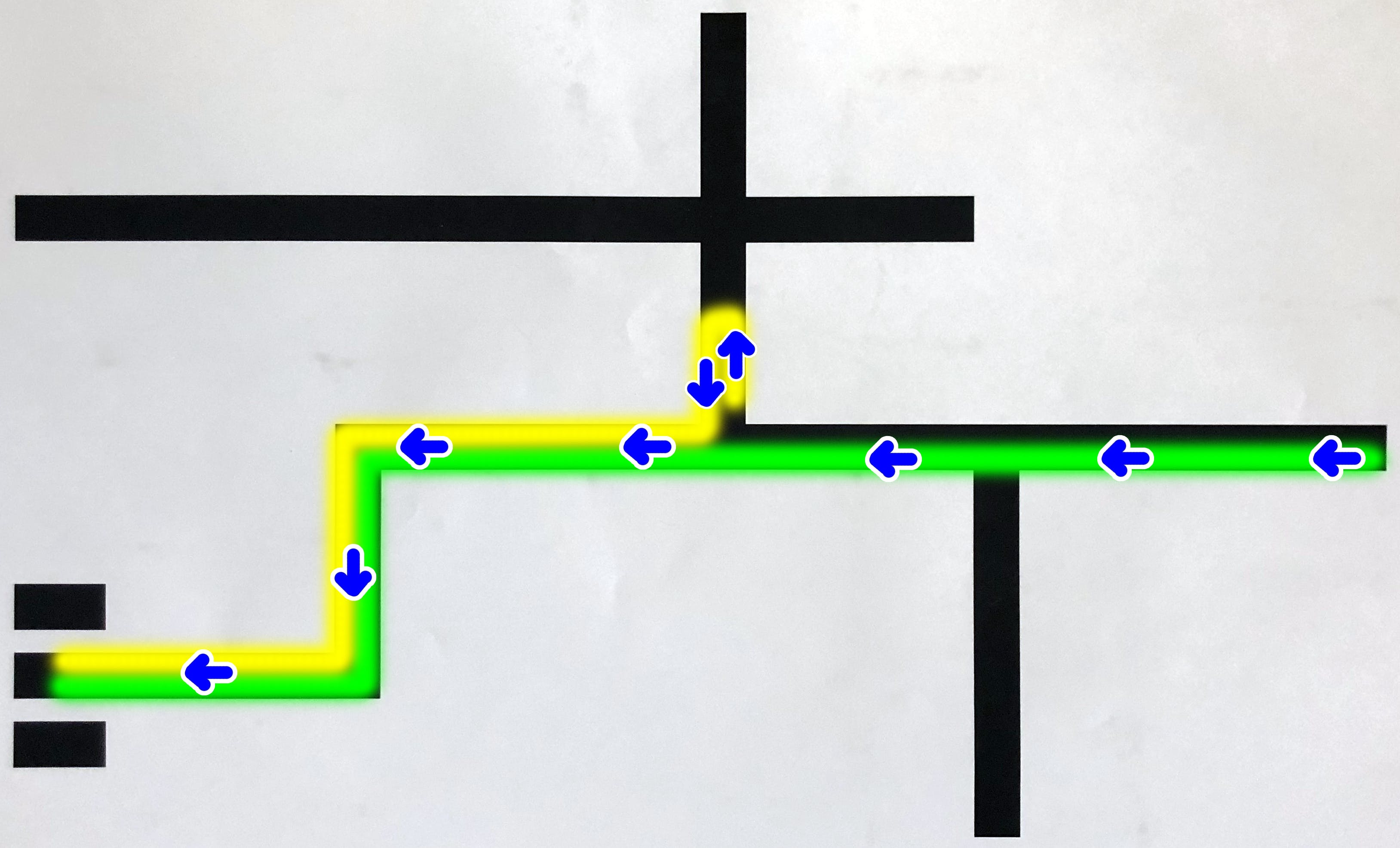
當機器人在執(zhí)行下面“迷宮解決算法”部分中的算法時,它還需要存儲最短路徑來解決它正在解決的迷宮問題。為此,使用了一個數(shù)組。每次機器人在十字路口轉(zhuǎn)彎(不僅僅是在別無選擇的地方轉(zhuǎn)彎)或掉頭時,它都會將轉(zhuǎn)彎存儲在數(shù)組中。然后,如果最后一個轉(zhuǎn)彎不是掉頭,它會檢查最后 3 個轉(zhuǎn)彎是否可以簡化為其他東西。
例如,機器人向左轉(zhuǎn),然后掉頭,然后向左轉(zhuǎn),可以簡化為在那個十字路口直行。因為它是左轉(zhuǎn)后掉頭的,顯然原來的左轉(zhuǎn)是錯誤的。
以下是可以簡化的模式。“L”= 左,“R”= 右,“S”= 直線,“U”= 掉頭。
- 南 -> R
- LUL -> S
- 規(guī)則 -> U
- LUS -> R
迷宮解決算法
當機器人正在解決一個新的迷宮時,該算法就會運行。它由多個 if-else-if-statements 組成,其中只有一個執(zhí)行。if 語句遵循左偏規(guī)則,這意味著機器人總是走它可能走的最左邊的路徑。
首先,如果線傳感器讀取全白,這意味著機器人不在一條線上,它可能只是跑出了線。機器人因此轉(zhuǎn)身并重新讀取線傳感器以獲得更新值。它還添加了一個“U”來表示最短路徑數(shù)組中的掉頭。
如果所有傳感器都是黑色的,則機器人位于丁字路口或四向路口。因為機器人偏左,它會走左路,重新讀取線傳感器以獲得更新值,并在最短路徑數(shù)組中存儲一個“L”。在左轉(zhuǎn)之前,機器人向前移動半輛汽車,使車輪與十字路口對齊。它還在左轉(zhuǎn)時保持面包板上的左側(cè) LED 亮起。
如果機器人找到了寶藏,它會向前移動一點點并重新檢查以確保它真的找到了寶藏。如果是,機器人進入勝利狀態(tài),停止電機,并設置定時器 A0 使機器人頂部面包板上的 LED 閃爍。
如果有左轉(zhuǎn)彎,機器人會向前移動半輛車,看看是在十字路口還是只是轉(zhuǎn)彎。然后它向左轉(zhuǎn),同時打開面包板上的左側(cè) LED,如果它是一個交叉路口而不僅僅是一個轉(zhuǎn)彎,它還會在最短路徑數(shù)組中添加一個“L”。
如果有右轉(zhuǎn)彎,機器人首先向前移動一點點,然后重新讀取線傳感器以確保它是右轉(zhuǎn)彎,左轉(zhuǎn)彎不是一個選項。如果左邊不是一個選項,它會向前移動汽車的剩余一半并檢查直行是否是一個選項。然后它要么直行要么右轉(zhuǎn)。如果它直行,它會在最短路徑數(shù)組中保存一個“S”。如果它走對了,它會在轉(zhuǎn)彎時打開右側(cè)的面包板 LED。
接下來的 else-if 語句用于簡單地沿著一條直線,因為其他特殊條件都不為真。為此,它會找到最外面的線傳感器并相應地進行校正。例如,如果最左側(cè)的線傳感器檢測到黑色,則機器人應通過向左轉(zhuǎn)大量并同時直行來進行糾正。
最短路徑算法
當機器人顯示通過已解決的迷宮的最短路徑時,該算法就會運行。就像迷宮解決算法一樣,它由多個 if-else-if 語句組成,每次 while 循環(huán)運行時只執(zhí)行其中的一個。
首先,如果機器人的第一個轉(zhuǎn)彎是掉頭,它會向前移動 1 個汽車長度,然后掉頭。它需要先向前移動,以便在它轉(zhuǎn)身后線傳感器處于一個好的位置。
如果機器人已經(jīng)展示了目前在迷宮中解決的所有問題,但仍未找到寶藏,則機器人切換到運行狀態(tài)并開始解決迷宮問題。
如果機器人找到了寶藏,它的行為與它在迷宮解決算法中的行為完全相同。它向前移動了一點點并重新檢查以確保它真的找到了寶藏。如果是,機器人進入勝利狀態(tài),停止電機,并設置定時器 A0 使機器人頂部面包板上的 LED 閃爍。
如果前方有左轉(zhuǎn)和/或右轉(zhuǎn)彎,這意味著前方有潛在的交叉路口,機器人會首先向前移動半輛車,并檢查是否可以直行。然后,它使用它對左、直和右可用性的了解來確定這是一個十字路口還是一個轉(zhuǎn)彎。如果它只是一個轉(zhuǎn)彎,它會跟隨轉(zhuǎn)彎。如果是十字路口,它會根據(jù)最短路徑數(shù)組的指示行事。
最后,如果上述 if 語句均不成立,機器人將像在迷宮解決算法中一樣簡單地沿著這條線走。
循環(huán)迷宮
我們的代碼使機器人能夠通過循環(huán)解決迷宮問題,并顯示它找到的通往寶藏的路徑。然而,它不一定會找到穿過這樣一個迷宮的最短路徑,因為循環(huán)允許通往寶藏的多條路徑。
要修改算法以找到帶環(huán)路的最短路徑,機器人需要在移動時跟蹤距離或時間,以便識別它已經(jīng)訪問了哪些交叉路口以及它從每個交叉路口行進的方向。它還需要沿著迷宮中的每條線行進,以確保它找到了最短路徑。
其他雜項算法
SysTick 計時器/線路傳感器:SysTick 計時器設置為每 0.025 秒發(fā)送一次中斷,此時機器人將讀取 8 個線路傳感器。為讀取線傳感器,代碼使用 LED 為每個傳感器的電容器充電 10μs。接下來,它將線路傳感器切換為輸入并使電容器放電 800μs。然后讀取每個傳感器的數(shù)字值。最后,LED 被關閉。該算法之所以有效,是因為每個線傳感器中的電容器在黑紙和白紙上以不同的速率放電。
定時器 A0/LED 閃爍:定時器 A0 在機器人開啟時初始化,但直到機器人頂部面包板上的 1 個或多個 LED 需要開始閃爍時才啟動。然后,它通過使用中斷調(diào)用上次啟動時提供給它的函數(shù)來處理閃爍適當?shù)?LED。因為定時器A0只是一個16位的定時器,定時器還使用了一個計數(shù)器,所以該函數(shù)只在每50次中斷時調(diào)用一次,而不是每次中斷都調(diào)用一次。
電機:電機使用 PWM(脈沖寬度調(diào)制)運行。為了使輪子旋轉(zhuǎn)得更快,它們在更高的時間百分比(每個周期幾微秒)內(nèi)被賦予數(shù)字 1 值。當電機需要做某事時,它們會得到一個方向并被阻止休眠。然后根據(jù)他們需要的速度為他們提供適當?shù)?PWM 信號。
緩沖開關:緩沖開關在 Launchpad 板上使用低電平有效邏輯和內(nèi)部上拉電阻。當按下保險杠開關時,會發(fā)生中斷,使機器人打開綠色 LED,反轉(zhuǎn),轉(zhuǎn)身 180 度,然后繼續(xù)解決迷宮。它還向最短路徑數(shù)組添加了一個“U”。
開始/停止按鈕:Launchpad 板上有左右按鈕。它們的功能在上一節(jié)“操作機器人”中進行了描述。每個按鈕在釋放時發(fā)送中斷,而不是在按下時發(fā)送中斷。這確保了當用戶仍在按下按鈕時機器人不會突然開始移動。
檢查寶藏:作為解決迷宮和顯示最短路徑算法的一部分,機器人會不斷檢查是否找到寶藏。它通過尋找一個黑色傳感器,然后是一個白色傳感器,然后是另一個黑色傳感器來檢測它是否找到了寶藏。只要存在黑到白和白到黑的過渡,就可以有任意數(shù)量的黑白傳感器。它不檢查黑-白-黑-白-黑,即使寶藏看起來就是這樣,因為這需要機器人很好地居中,從而使其不可靠。我們也從未使用黑-白-黑算法和上面“迷宮解決算法”部分中描述的對獲勝條件的雙重檢查得到誤報。
- 虛擬迷宮求解機器人開源分享
- 魔方解算機器人開源分享
- 瞳步迎賓講解機器人
- 了解機器人電子教材下載 19次下載
- 機器人無線充電電路設計 47次下載
- 基于Matlab的機構(gòu)與機器人分析資料下載 11次下載
- 基于DSP和PC的農(nóng)業(yè)機器人控制系統(tǒng) 17次下載
- 基于DSP芯片的足球機器人實現(xiàn)與設計 26次下載
- 基于EtherCAT和TwinCAT3的協(xié)作機器人控制系統(tǒng) 14次下載
- 競賽機器人制作技術PDF電子書免費下載 44次下載
- 基于LPC1114的迷宮機器人的設計與實現(xiàn) 13次下載
- 基于DELTA機器人的動力學逆解算法設計及應用 44次下載
- 基于ARM的機器人走迷宮控制系統(tǒng)與算法設計 27次下載
- 特殊尺寸機器人的位置反解算法 35次下載
- 軌跡機器人教案 0次下載
- 發(fā)現(xiàn)更多機器人開發(fā)技巧 AI與邊緣計算加持 638次閱讀
- 鑄造機器人是什么?選擇工業(yè)機器人應該考慮的方向 1137次閱讀
- 面對疫情 醫(yī)療機器人能幫上什么忙? 2126次閱讀
- 工業(yè)機器人編程入門_工業(yè)機器人的編程要求 9571次閱讀
- 醫(yī)用機器人的定義_醫(yī)用機器人發(fā)展 3122次閱讀
- 醫(yī)用機器人的功能_醫(yī)用機器人分類 2227次閱讀
- 機器人控制器有哪些類型_機器人控制器發(fā)展 1.1w次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8127次閱讀
- 機器視覺的機器人取代四臺傳統(tǒng)的火焰處理機器人 3271次閱讀
- 盤點2018年機器人領域十大技術 3312次閱讀
- 如何區(qū)分機器人、協(xié)作機器人和移動機器人? 6828次閱讀
- AI和VR在機器人控制的實在應用匯總 5506次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀
- 機器人如何識別顏色 2.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論